81%成功率!纽约大学研究人员推出训练家用多技能机器人的框架Dobb-E
发布时间:2023年12月20日
多年来,机器人专家已经成功地将各种机器集成到我们的家中,例如洗碗机、洗衣机扫地机器人。然而,这些机器只擅长有效地执行单一任务。能够适应和学习我们的需求并保持成本效益的家庭助理----“通才机器人” 在大规模商业化方面尚未取得突破。
要使机器人成功融入家庭环境,需要让用户能够快速教授机器人新技能,满足各种家务需求。这种方法还应确保人的安全,机器人在学习新任务时不会对任何人造成伤害。最后,该方法不应对最终用户提出特殊要求,而应简化他们的生活,而不是使其更加复杂。
近日,纽约大学的研究人员推出了一种经济实惠且多功能的通用框架Dobb-E,用于有效训练移动机器人执行多种家务任务。
四个关键组成部分
数据收集工具:数据收集工具The Stick廉价但易于使用,由简单零件和iPhone构建而成。

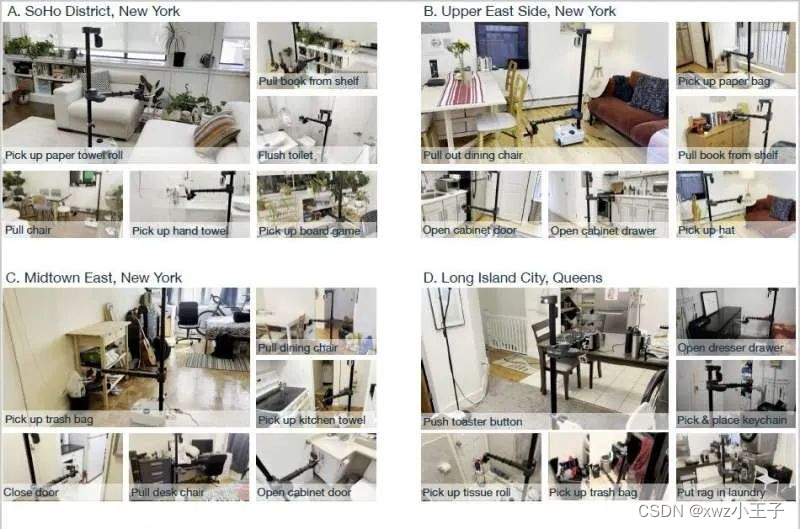
多样化数据集:使用The Stick编译了用于训练家用机器人的新数据集,他们将其称为Homes of New York (HoNY)数据集。HoNY数据集专注于更多样化的场景和机器人行为,包含了研究人员在纽约216个家庭环境中利用智能手机收集的视频数据。
预训练模型:该模型采用最先进的自我监督学习方法MoCo-v3在HoNY数据集上进行家庭预训练。
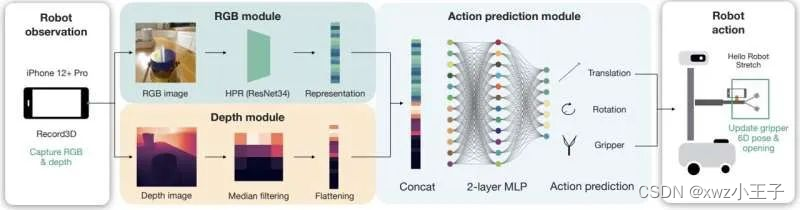
部署方案:研究人员在真实家庭环境中进行了一系列实验,在这些实验中,他们将经过训练的算法部署在Hello-Robot机器人公司的多功能移动家庭机器人Stretch上。经过五分钟的演示和十五分钟的HPR模型调整,机器人在10个家庭被教导完成109种不同的家务活,取得了81%的成功率。

研究人员表示:“未来研究方向第一是研究连锁技能,以在家庭中完成有意义的长期任务;第二是改进机器人传感器和摇杆,迭代深度传感器,添加更多数据视图,并添加更多传感器模式,例如触摸和声音。”
文章来源:https://blog.csdn.net/weixin_44887311/article/details/135096175
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Babylonjs inspector工具开启embedMode模式后不显示
- 1280:【例9.24】滑雪
- 【spring源码分析】@ComponentScan的使用以及分析
- Redis数据库相关指令
- 视觉SLAM十四讲|【一】三维空间刚体运动
- 【lesson18】MySQL内置函数(1)日期函数和字符串函数
- C++模板初阶
- 关于“等待”的交互设计
- 揭秘数字身份:如何通过浏览器指纹精准追踪用户
- Java 基础学习(八)多态、接口、造型与内部类