node相关的args属性与<param>子标签的区别
发布时间:2024年01月01日
?launch文件内:node标签内的<param>标签示例:

?可以看到launch文件内的<param>标签在命令行内会转化为--ros-args -p 这样格式的命令,说明<param>标签指定的是ros2内的参数。不能用于传递非ros2的传入参数
如果要传入非ros2的参数需要使用<node>标签内的args属性


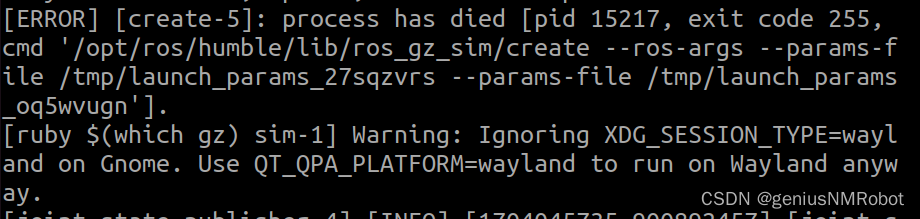
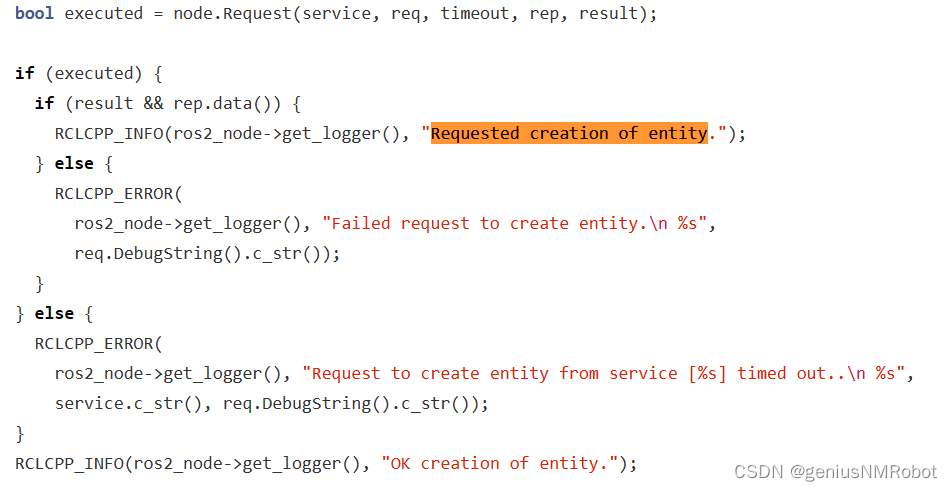
这个及说明命令成功了
?至少看上去比另外2个选项好得多,虽然我任然没有看到模型
初步估计:我下错了版本,我应该下载humble版本的ros_gz,但是我好像下载了ros1版本可能
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135321550
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Docker容器的优化和性能调优技巧
- Java面试汇总——jvm篇
- 如何在Arduino项目中使用KY008激光传感器
- vue3 引入腾讯地图解决请求接口https://apis.map.qq.com/ws/place/v1/suggestion跨域问题
- 9款安卓手机上最好的联系人恢复软件列表
- 【LLM】大语言模型的前世今生
- 汽车级EEPROM 存储器 M24C64-DRMN3TP/K是电可擦除可编程只读存储器?它的功能特性有哪些?
- Linux学习(9)——RAID与服务器的常见故障
- 使用 Neo4j 和 LangChain 集成非结构化知识图增强 QA
- 提升数据库性能的关键指南-Oracle AWR报告