ros2 humble安装joint_state_publisher功能包
发布时间:2023年12月21日
?第一步从GitHub下载此功能包:命令
git clone -b ros2 https://github.com/ros/joint_state_publisher.git然后执行里面的setup.py文件就完成安装;命令是
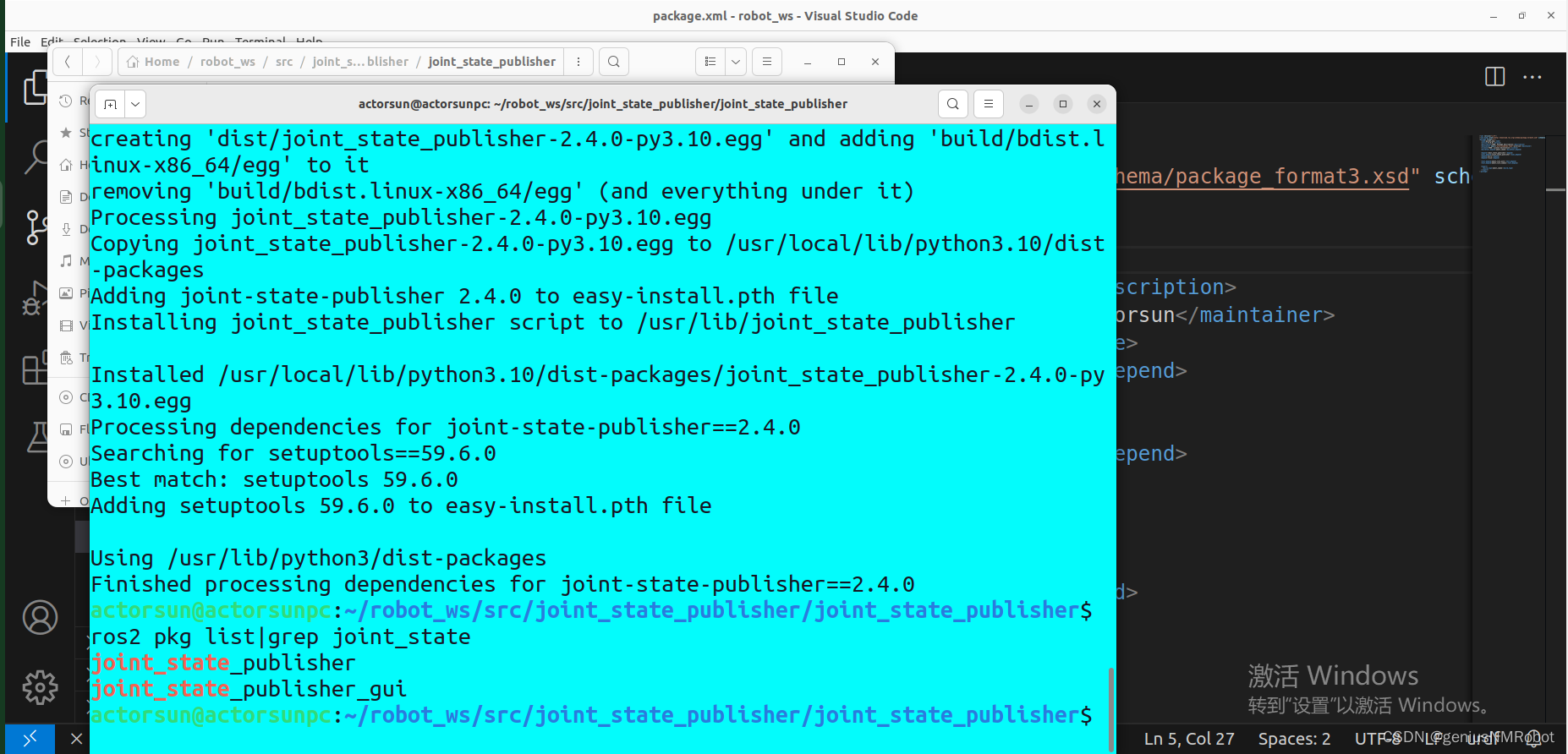
sudo python setup.py install最后检查是不是有安装好,输入命令:
ros2 pkg list|grep joint_state_publisher如果显示出有这个包就是安装好了:

文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135132435
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- NLP论文阅读记录 - 2023 | EXABSUM:一种新的文本摘要方法,用于生成提取和抽象摘要
- 基于Java教师信息管理系统
- STL中优先队列(堆)的详解
- vue 3.0 所采用的 Composition Api 和 vue 2.0 使用的 Option Api 区别
- 现代 C++ 小利器:参数绑定包装器堪称「Lambda 小平替」
- SpringBoot前后端分离开发项目部署时,项目打包准备工作
- R语言【paleobioDB】——pbdb_collection():从PBDB获取单个采集号的基本信息
- 什么是关键词排名蚂蚁SEO
- SCI一区级 |【GWO-Attention-CNN-GRU】基于灰狼算法优化注意力机制卷积神经网络结合门控循环单元实现数据多维输入单输出预测附matlab代码
- 力扣-35. 搜索插入位置