【手势识别】BP神经网络与HU方法特征手势识别(视频+图像,0-9)【含Matlab源码 3436期】
?博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
🍎个人主页:海神之光
🏆代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
??座右铭:行百里者,半于九十。
更多Matlab仿真内容点击👇
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)
?一、手势识别简介
1 系统设计方案
今年来,手势识别作为新一代人机交互手段,受到了国内外研究学者以及公司的关注和研究,并且取得了突出的成果,在智能电视、游戏娱乐设备、机器人等方面都有了广泛的应用,而且,通过对手势识别技术的研究,可以推动机器设备对视觉感知能力的认识,并将其应用到更多的人工智能领域,使机器设备更好的理解人类的想法和意图,为我们的生活和工作带来更大的好处。本文实现了一种能识别五种手势的手势识别系统,可以完成人机交互的基本任务。
手势动作可以分为两种,一种是相对不动,没有任何附加动作的静态手势动作,另一种是相对运动、伴随着复杂变化(如缠绕、组合等)动态手势动作,前者突出表示形式及状态,后者突出变化及轨迹。本文主要针对第一种进行研究,系统处理流程如图1所示。
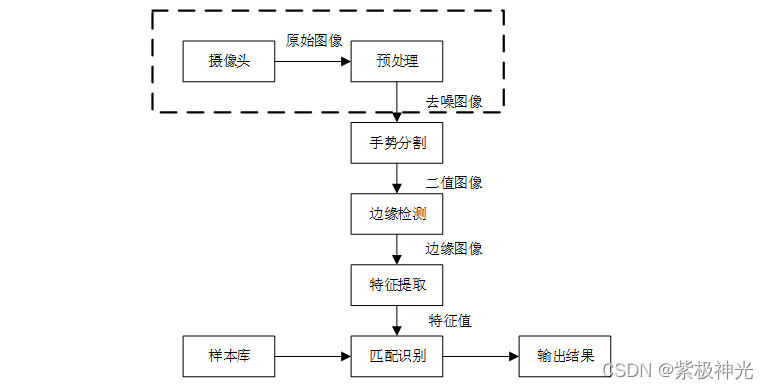
图1 系统结构流程图
2 系统验收需要达到的目标和测试水平
本系统可以对五种预定义的静态手势进行识别,如图2所示。
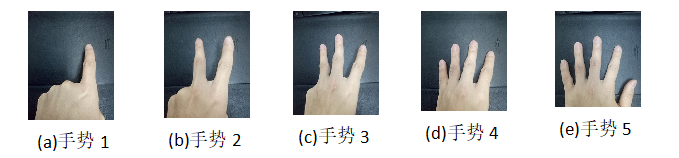
图2 五种预定义的静态手势
当系统输入以上任意一种手势时,系统能够准确迅速的做出判断当前输入的手势是属于哪一种,并且在控制台打印出相应信息。例如输入图片(a)时,系统在控制台输出手势1;输入图片(b)时,系统在控制台输出手势2,…。
3 系统实现框图和流程图
3.1手势分割
本文选择在YcbCr颜色空间进行手势分割处理,分割的重点在于建立肤色模型,利用手势皮肤颜色在YcbCr空间内满足聚类的特点,设定阈值范围,对图像进行扫描,在此范围内则认定为手势,不在此范围内的则不予考虑,查阅相关资料并进行试验发现,人手颜色在YcbCr的二维子空间(Cb,Cr)上的分布范围满足:Cb[133,173]&Cr[77,127],当像素点满足此条件就认定为手势,此方法处理简单。手势分割流程图如图3所示:
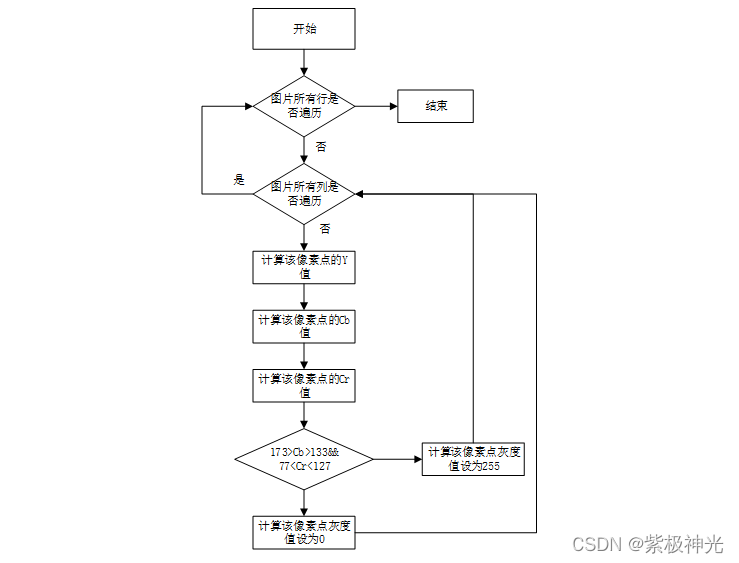
图3 手势分割流程图
?二、部分源代码
function varargout = main(varargin)
% MAIN MATLAB code for main.fig
% MAIN, by itself, creates a new MAIN or raises the existing
% singleton*.
%
% H = MAIN returns the handle to a new MAIN or the handle to
% the existing singleton*.
%
% MAIN(‘CALLBACK’,hObject,eventData,handles,…) calls the local
% function named CALLBACK in MAIN.M with the given input arguments.
%
% MAIN(‘Property’,‘Value’,…) creates a new MAIN or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before main_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to main_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE’s Tools menu. Choose “GUI allows only one
% instance to run (singleton)”.
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help main
% Last Modified by GUIDE v2.5 19-Jan-2022 23:28:04
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct(‘gui_Name’, mfilename, …
‘gui_Singleton’, gui_Singleton, …
‘gui_OpeningFcn’, @main_OpeningFcn, …
‘gui_OutputFcn’, @main_OutputFcn, …
‘gui_LayoutFcn’, [] , …
‘gui_Callback’, []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% — Executes just before main is made visible.
function main_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to main (see VARARGIN)
% Choose default command line output for main
handles.output = hObject;
set(gcf,‘name’,’ BP HU ? ??’);
% Choose default command line output for main
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes main wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% — Outputs from this function are returned to the command line.
function varargout = main_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% — Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% ? ? ?
[file,path]=uigetfile({‘.’;‘.bmp’;'.jpg’;‘.tif’;'.jpg’},‘? ? ‘);% ? ? ·
if isequal(file,0)||isequal(path,0)
errordlg(’ ? ??’,’ ?’);% ? ? ? ?
return;
else
im_path=[path,file];% ? · + ?
sourceimage=imread(im_path);% · ??
set(handles.axes1,‘HandleVisibility’,‘ON’);% ?
axes(handles.axes1);%% 1 ?
imshow(sourceimage);% axes1 ???
title('?? ? ');
end
?三、运行结果




?四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]李昌锋,郭生挺,陈文婷.基于静态手势识别的视力检测系统设计[J].科技创新与应用. 2021,11(13)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Git tag使用
- 用Qlib模拟实战中机器学习多因子预测的流程:必须滚动预测
- 【linux】Linux管道的原理与使用场景
- flutter 实战 之 dio小实践
- 工作队列的用法
- java中如何创建一个自己的数组
- react里面bind与箭头函数
- Massachusetts Institute of Technology
- 怎样无货源开网店?2024抖店最新开通和运营教程,小白必看!
- 报错:NVIDIA-SMI has failed because it couldn‘t communicate with the NVIDIA driver