【XR806开发板试用】系列之一 - Linux环境下Ubuntu完全开发流程
前言
为了让极术社区开发者体验搭载安谋科技STAR-MC1处理器的面向IoT领域的全志XR806开发板,极术社区联合全志在线开发者社区共同推出XR806开发板免费试用活动。
极术社区特准备了200块XR806开发板作为2022年社区新年活动,申请的人数有600多,手快有手慢无,有幸申请到一块XR806开发板。该开发板目前支持鸿蒙L0轻量级设备(OpenHarmony-v1.1.2-LTS),之前没有接触过,值得开发体验一番。
环境准备
系统:Ubuntu 20.04.3 LTS
Python: Python 3.8.10
编译链:gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2
串口调试工具:
CuteCom - http://cutecom.sourceforge.net/
或在安装好Wine环境下,可以使用在Windows上的串口调试工具,如经典的putty等
开发流程
官方参考:https://xr806.docs.aw-ol.com/study/soft_inx/,本文将完全在Ubuntu环境下开发,基本流程和官方一致。
一. 代码下载
mkdir xr806
cd xr806
repo init -u ssh://git@gitee.com/openharmony-sig/manifest.git -b OpenHarmony_1.0.1_release --no-repo-verify -m devboard_xr806.xml
repo sync -c -j8
repo forall -c ‘git lfs pull’
二. 环境配置
1.OpenHarmony相关工具
Ubuntu环境配置可参考OpenHarmony官方:获取源码及Ubuntu编译环境准备,因XR806主要采用gcc编译,环境配置重点关注下安装Python3和安装hb(暂可以不安装llvm)。
注:在下载完成代码后,可以在项目根目录下,执行以下命令安装OpenHarmony编译系统工具 - hb(也可参考OpenHarmony官方):
pip3 install build/lite
2.GCC编译链安装
解压环境准备小节中下载的gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2
默认解压到~/tools目录
mkdir -p ~/tools
tar -jxvf gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2 ~/tools
注:~表示你的/home/用户名目录,
项目编译链配置默认~/tools目录下,可以不用修改编译链路径,当然在也可以解压到其他目录
三. 固件编译
请详见官方参考:https://xr806.docs.aw-ol.com/study/soft_compile
- 首次编译工程,需要对原生库进行配置,否则无法编译通过,配置步骤如下:
cd device/xradio/xr806/xr_skylark
cp project/demo/audio_demo/gcc/defconfig .config
make menuconfig
make build_clean
make lib -j
cd -
hb set
hb build -f
注:首次编译可能会遇到异常,请参考官方固件编译说明
四. 固件下载
固件下载请参考:https://xr806.docs.aw-ol.com/study/soft_flash/,Ubuntu环境下,与Windows相同,
编译生成的固件在device/xradio/xr806/xr_skylark/out,名称为xr_system.img
1.设备识别
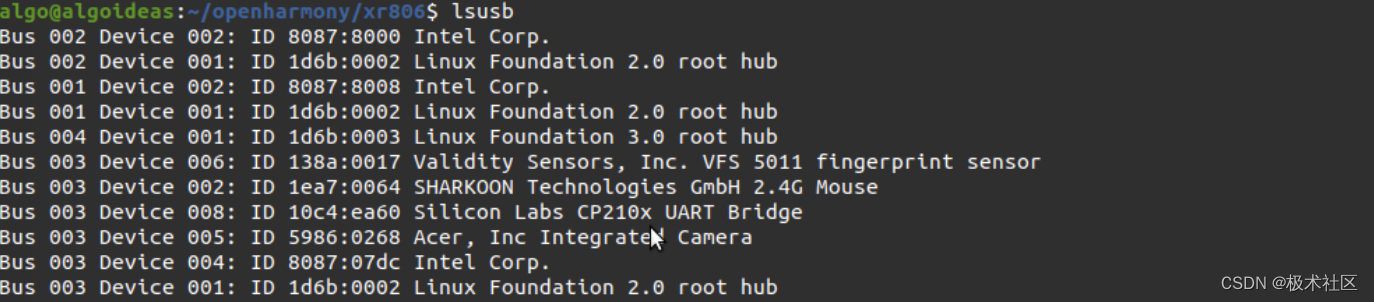
将XR806开发板,插入PC的USB接口,用lsusb命令查看,会多出一个设备,设备标识:ID 10c4:ea60 Silicon Labs CP210x UART Bridge,如下图所示:
algo@algoideas:~/openharmony/xr806$ lsusb
Bus 002 Device 002: ID 8087:8000 Intel Corp.
Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 001 Device 002: ID 8087:8008 Intel Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 003 Device 006: ID 138a:0017 Validity Sensors, Inc. VFS 5011 fingerprint sensor
Bus 003 Device 002: ID 1ea7:0064 SHARKOON Technologies GmbH 2.4G Mouse
Bus 003 Device 008: ID 10c4:ea60 Silicon Labs CP210x UART Bridge
Bus 003 Device 005: ID 5986:0268 Acer, Inc Integrated Camera
Bus 003 Device 004: ID 8087:07dc Intel Corp.
Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
algo@algoideas:~/openharmony/xr806$ ls /dev/ttyUSB*
/dev/ttyUSB0
新增加的设备节点名称为:ttyUSB0
2.工具配置
Linux下烧录工具文件位于device/xradio/xr806/xr_skylark/tools下,工具名为phoenixMC,工具配置文件为settings.ini,如下图所示:
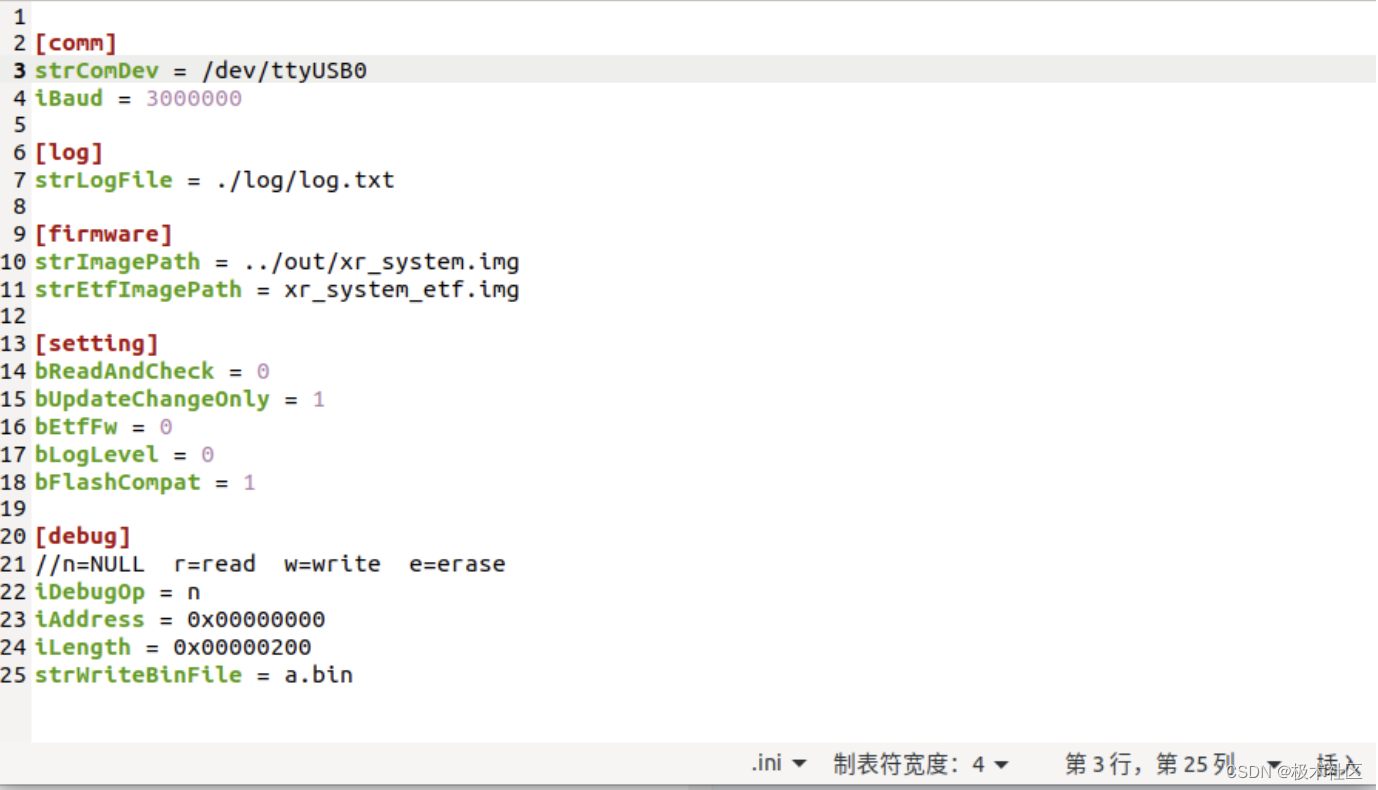
主要修改:strComDev iBaud 和 strImagePath
[comm]
strComDev = /dev/ttyUSB0
iBaud = 3000000
[log]
strLogFile = ./log/log.txt
[firmware]
strImagePath = ../out/xr_system.img
strEtfImagePath = xr_system_etf.img
3.固件烧录
执行以下命令便可以烧录:
cd device/xradio/xr806/xr_skylark/tools
./phoenixMC
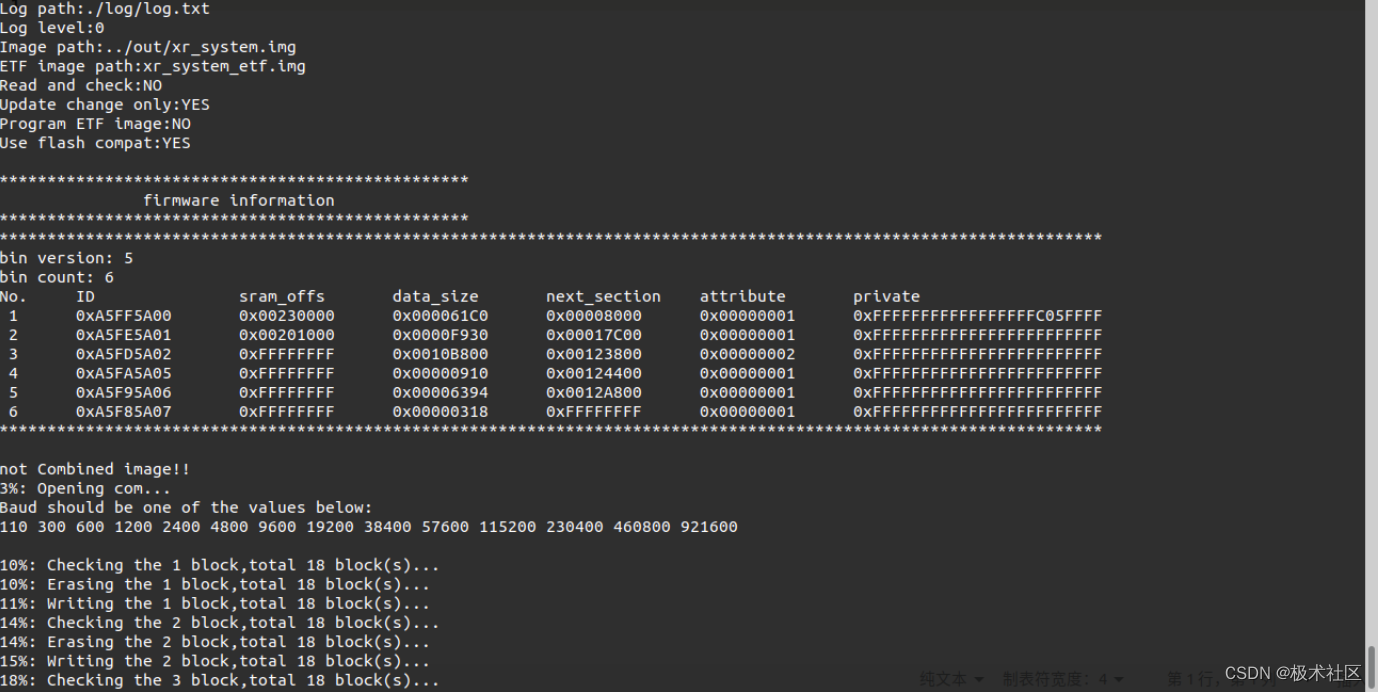
烧录部分过程如下:
注:Linux下烧录,固件路径长度有限制,使用路径时,目前使用的是相对路径,或如用其他路径,请拷贝固件到其他路径长度较短的目录下
五. 串口调试
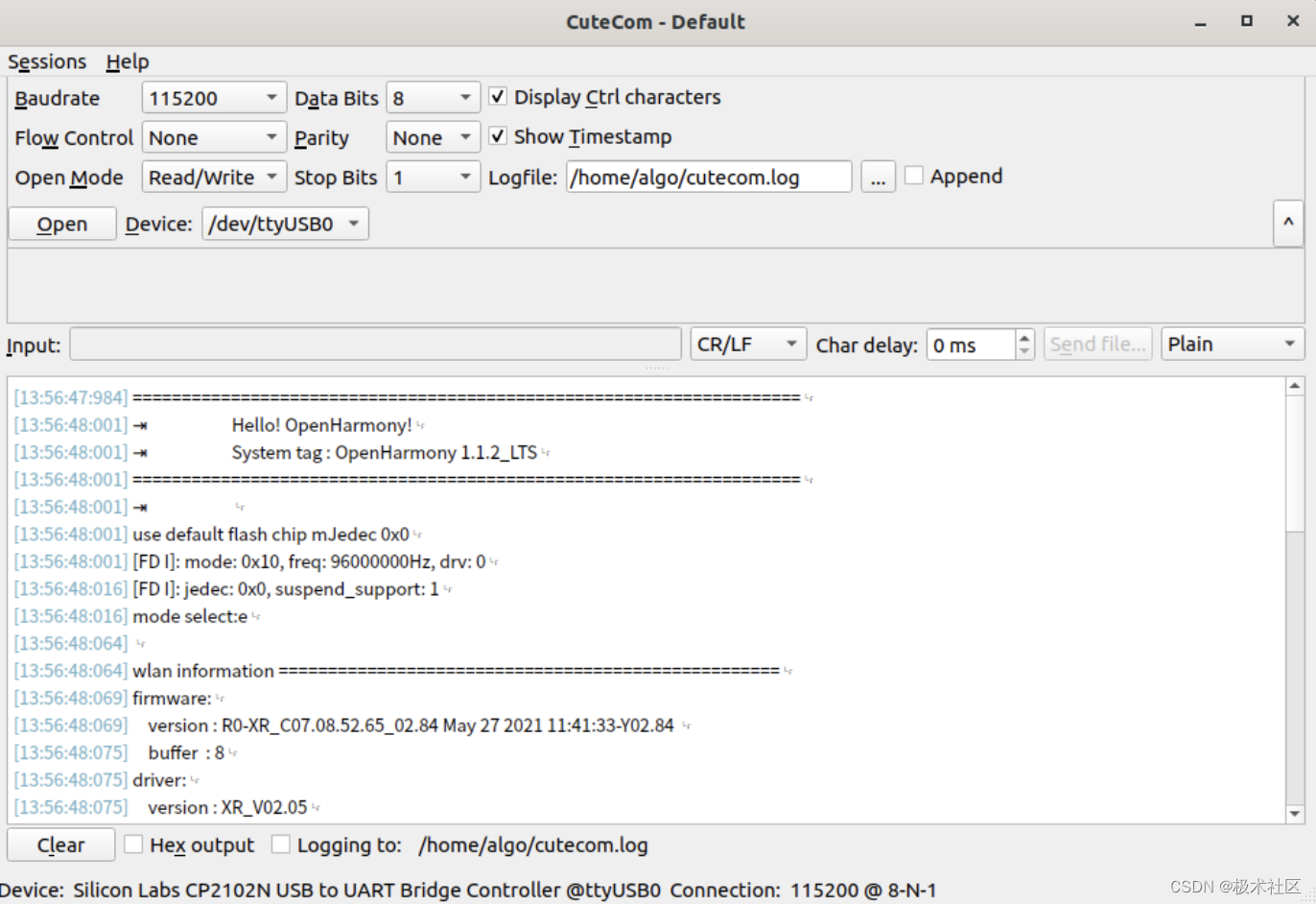
打开CuteCom工具,设置好波特率为115200,及相关参数,并点击Open,此时按下开发板的Reset键即可,看到XR806的串口日志输出,当然也可以输入命令进行交互。
串口设置及XR806日志输出如图所示:
问题与总结
作为一名开发者,XR806在Linux环境下Ubuntu开发,整个开发的流程很顺利,本文未涉及到应用程序,仅涉及到固件相关开发,应用开发烧录一致,应用开发将在下一篇文章介绍,或参考官方相关文章。
Linux环境下开发,主要遇到以下问题:
Linux下烧录波特率非实际配置的3000000,对比Windows环境下,固件烧录慢很多,烧录提示如下:
Baud should be one of the values below:
110 300 600 1200 2400 4800 9600 19200 38400 57600 115200 230400 460800 921600
参考资料:
https://xr806.docs.aw-ol.com/
https://aijishu.com/a/1060000000256653
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Optional 优雅判空
- 服务器数据恢复-昆腾存储StorNext文件系统下raid5数据恢复案例
- stable diffuison的安装和使用
- likeshop开源免费商用电商系统存在任意文件上传漏洞CVE-2024-0352
- 4-Docker命令之docker logout
- 分享44个PyQt5源码总有一个是你想要的
- mysql主从参数配置及变量引用
- WSL的导出与导入
- nodejs设置x-xss-protection解决xss问题
- 2024最新Java高频面试题总结(附答案PDF)春招面试必备!