26、江科大stm32视频学习笔记——W25Q64简介
发布时间:2024年01月21日
一、电路图
1、软件模拟的SPI:线可以任意接
2、硬件模拟的SPI:要按以下方式连接

3、本次软件模拟和硬件模拟使用同一个电路图,方便切换
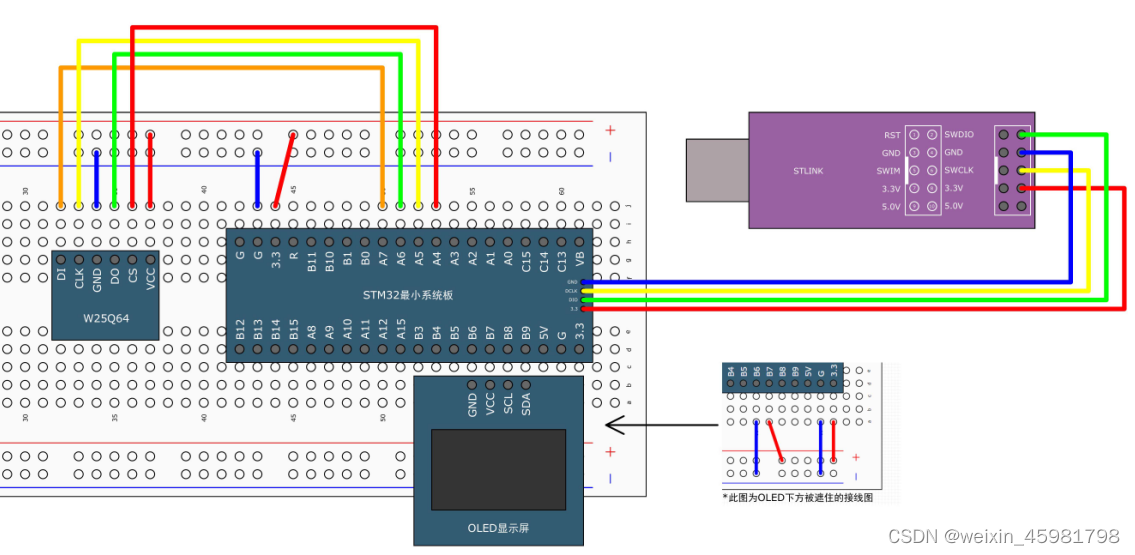
CS(片选):PA4? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?DO(从机输出):PA6
CLK(时钟):PA5? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?DI(从机输入):PA7
二、软件SPI读写W25Q64
1、SPI.c(初始化寄存器,实现读取一个字节的功能)
#include "stm32f10x.h" // Device header
void MySPI_W_SS(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue);
}
void MySPI_W_SCK(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_5, (BitAction)BitValue);
}
void MySPI_W_MOSI(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue);
}
uint8_t MySPI_R_MISO(void)
{
return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6);
}
void MySPI_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //上拉输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
MySPI_W_SS(1); //SS默认高电平(下降沿为开始工作,低电平状态为工作中,上升沿为结束工作)
MySPI_W_SCK(0); //SCK默认为低电平(上升沿移入数据,下降沿移出数据)
}
void MySPI_Start(void)
{
MySPI_W_SS(0);
}
void MySPI_Stop(void)
{
MySPI_W_SS(1);
}
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{
uint8_t i, ByteReceive = 0x00;
for (i = 0; i < 8; i ++)
{
//先SS下降沿,移出数据,SCK上升沿,移入数据,再SCK下降沿,移出数据,下面只管主机,
MySPI_W_MOSI(ByteSend & (0x80 >> i)); //将数据移出到MOSI线
MySPI_W_SCK(1); //上升沿移入数据
if (MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);} //将移入的数据读取出来
MySPI_W_SCK(0); //下降沿移出数据
}
return ByteReceive; //读取出来的数据
}
?
文章来源:https://blog.csdn.net/weixin_45981798/article/details/135730430
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- linux下编译ffmpeg 以及交叉编译并引入Android
- synchronized和lock的区别
- 面试必备:C++ 多态 (附:多态重载重写区别)
- 达梦数据库应用操作建议指导
- 代码随想录算法训练营第三天 | 203.移除链表元素、707.设计链表、206.反转链表
- SpringFramework实战指南(三)
- c 切割任意n*m块的通用方法
- 苹果证书p12和描述文件的创建方法
- 虚幻引擎:开创视觉与创意的新纪元
- 视频画面怎么旋转方向?4个方法教你如何旋转