blender scripting 编写
发布时间:2023年12月25日
blender scripting 编写
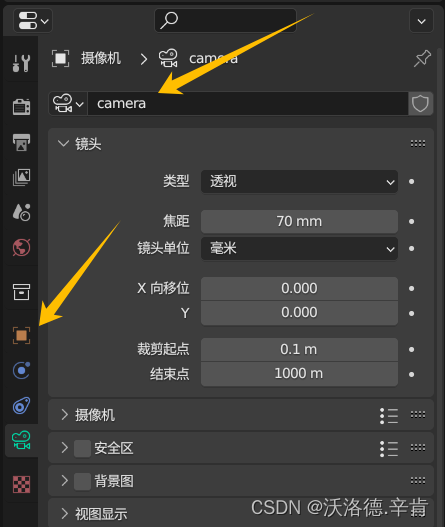
一、查看ui按钮对应的代码

二、查看或修改对象名称
三、案例:渲染多张图片并导出对应的相机参数
注:通过ui交互都设置好,如果ui能渲染,该代码就能运行成功。
import bpy
import math
import os
from mathutils import Vector, Matrix
from math import radians
import bmesh
import datetime
import time
import numpy as np
import os
#from os import path
scenenumber='baseline_scene6_clean'
#basefolder=os.path.join(os.path.expanduser('~'), 'Documents', 'Zantis', scenenumber)
scene = bpy.data.scenes["Scene"]
#scene.camera.rotation_mode='YZX'
def length():
leg=0.00
p1=[0.0,0.0]
temp=0
ob = bpy.context.object # active object
for p in ob.data.splines.active.bezier_points:
p2=p1
p1=[p.co.x,p.co.y]
if(temp==0):
temp=1
continue
distance = math.sqrt( ((p1[0]-p2[0])**2)+((p1[1]-p2[1])**2) )
leg=leg+distance
return leg
item=0
multiply=40
camera = bpy.data.objects['Camera']
target=bpy.data.objects['mesh.001']
my_obj=[]
#my_obj.append("019")
#my_obj.append("021")
#my_obj.append("029")
#my_obj.append("030")
#my_obj.append("031")
#my_obj.append("032")
#my_obj.append("033")
#my_obj.append("034")
my_obj.append("040")
#my_obj.append("042")
t1 = time.time()
#import bpy
#for ob in bpy.context.selected_editable_objects:
# ob.active_material_index = 0
# for i in range(len(ob.material_slots)):
# bpy.ops.object.material_slot_remove({'object': ob})
for item in my_obj:
#break
# basefolder=os.path.join(os.path.expanduser('~'), 'Desktop', 'Urban_Enviroment_Texturing','Mesh_Texturing_Pipeline', 'Scenes', '005', 'images')
basefolder = os.path.join('E:\\', 'chromeDownload', 'mvs_test', 'scenes', '006', 'images')
t2 = time.time()
for ob in bpy.context.selected_objects:
ob.select_set(False)
curv='Curve.'+item
path = bpy.data.objects[curv]
camera.select_set(True)
path.select_set(True)
# bpy.context.view_layer.objects.active = path # parent
# bpy.ops.object.parent_set(type='FOLLOW') # follow path
# camera.location=path.matrix_world @ bpy.context.object.data.splines.active.bezier_points[0].co
# target.location=path.matrix_world @ bpy.context.object.data.splines.active.bezier_points[1].co
# direc=target.location-camera.location
frames=(int)(length()*multiply)
# bpy.data.scenes["Scene"].frame_end=frames
# bpy.context.object.data.path_duration=frames
frame_is=0
frames=frames+1
print(frames)
count=0
for frame_is in range(scene.frame_start, scene.frame_end + 1):
# for frame_is in range(frames - 3):
t3 = time.time()
scene.frame_current=frame_is
#print(scene.frame_currents
# s=str(scene.objects['Camera'].matrix_world[0][3])+"_"+str(scene.objects['Camera'].matrix_world[1][3])+"_"+str(scene.objects['Camera'].matrix_world[2][3])+"_"
# s=s+str(direc[0])+"_"+str(direc[1])+"_"+str(direc[2])+".jpg"
s = str(scene.frame_current).zfill(5)+".jpg"
image_filepath=os.path.join(basefolder,s)
#print(s)
bpy.data.scenes['Scene'].render.filepath = image_filepath
# bpy.ops.render.render(write_still=True)
elapsedTime = time.time() - t3
print("Frame time passed {hours:d}:{minutes:d}:{seconds:d}"
.format(hours=int((elapsedTime / 60 ** 2) % (60 ** 2)), minutes=int((elapsedTime / 60) % (60)),
seconds=int(elapsedTime % 60)))
# print('path to create: ', os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item))
if not os.path.exists(os.path.join(os.path.expanduser('~'), basefolder)):
os.mkdir(os.path.join(os.path.expanduser('~'), basefolder))
if not os.path.exists(os.path.join(os.path.expanduser('~'), basefolder, 'RTm/')):
os.mkdir(os.path.join(os.path.expanduser('~'), basefolder, 'RTm/'))
# Set up rendering of depth map:
bpy.context.scene.use_nodes = True
tree = bpy.context.scene.node_tree
links = tree.links
# clear default nodes
for n in tree.nodes:
tree.nodes.remove(n)
# create input render layer node
rl = tree.nodes.new('CompositorNodeRLayers')
RGB2BW = tree.nodes.new(type="CompositorNodeRGBToBW")
links.new(rl.outputs[0], RGB2BW.inputs[0])
map = tree.nodes.new(type="CompositorNodeMapValue")
# Size is chosen kind of arbitrarily, try out until you're satisfied with resulting depth map.
map.size = [0.05]
map.use_min = True
map.min = [0]
map.use_max = True
map.max = [1]
links.new(rl.outputs[2], map.inputs[0])
mix_multi = tree.nodes.new(type="CompositorNodeMixRGB")
# Size is chosen kind of arbitrarily, try out until you're satisfied with resulting depth map.
mix_multi.blend_type = 'MULTIPLY'
mix_multi.inputs[2].default_value[0] = 0.5
mix_multi.inputs[2].default_value[1] = 0.5
mix_multi.inputs[2].default_value[2] = 0.5
# mix_multi.inputs[2].default = [0.5 , 0.5, 0.5, 1.0]
links.new(rl.outputs[3], mix_multi.inputs[1])
mix_multi2 = tree.nodes.new(type="CompositorNodeMixRGB")
# Size is chosen kind of arbitrarily, try out until you're satisfied with resulting depth map.
mix_multi2.blend_type = 'ADD'
mix_multi2.inputs[2].default_value[0] = 0.5
mix_multi2.inputs[2].default_value[1] = 0.5
mix_multi2.inputs[2].default_value[2] = 0.5
links.new(mix_multi.outputs[0], mix_multi2.inputs[1])
invert = tree.nodes.new(type="CompositorNodeInvert")
links.new(map.outputs[0], invert.inputs[1])
# The viewer can come in handy for inspecting the results in the GUI
depthViewer = tree.nodes.new(type="CompositorNodeViewer")
links.new(invert.outputs[0], depthViewer.inputs[0])
# Use alpha from input.
links.new(rl.outputs[1], depthViewer.inputs[1])
# Normal map
# The viewer can come in handy for inspecting the results in the GUI
depthViewer2 = tree.nodes.new(type="CompositorNodeViewer")
links.new(rl.outputs[1], depthViewer2.inputs[1])
links.new(mix_multi2.outputs[0], depthViewer2.inputs[0])
# fileOutput = tree.nodes.new(type="CompositorNodeOutputFile")
# fileOutput.base_path = os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item, 'depth')
## fileOutput.file_slots[0].path = str(scene.frame_current).zfill(5)
# links.new(invert.outputs[0], fileOutput.inputs[0])
#
# fileOutput2 = tree.nodes.new(type="CompositorNodeOutputFile")
# fileOutput2.base_path = os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item,'normal')
## fileOutput2.file_slots[0].path = str(scene.frame_current).zfill(5)
# links.new(mix_multi2.outputs[0], fileOutput2.inputs[0])
#
# fileOutput3 = tree.nodes.new(type="CompositorNodeOutputFile")
# fileOutput3.base_path = os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item,'panoramas_BW')
## fileOutput3.file_slots[0].path = str(scene.frame_current).zfill(5)
# links.new(RGB2BW.outputs[0], fileOutput3.inputs[0])
bpy.ops.render.render(write_still=True)
location, rotation = scene.objects['Camera'].matrix_world.decompose()[0:2]
R_world2bcam = rotation.to_matrix().transposed()
T_world2bcam = -1*R_world2bcam @ location
Camera_RT_matrix = Matrix((
R_world2bcam[0][:] + (T_world2bcam[0],),
R_world2bcam[1][:] + (T_world2bcam[1],),
R_world2bcam[2][:] + (T_world2bcam[2],),
[0,0,0,1],))
np.savetxt(os.path.join(os.path.expanduser('~'), basefolder, 'RTm')+'/'+str(frame_is).zfill(6)+"_RTm.txt",np.array(Camera_RT_matrix))
# break
scene.frame_current=0
path.select_set(False)
bpy.ops.object.parent_clear(type='CLEAR')
# camera.select_set(False)
elapsedTime = time.time() - t1
print("Total time passed {hours:d}:{minutes:d}:{seconds:d}"
.format(hours=int((elapsedTime / 60 ** 2) % (60 ** 2)), minutes=int((elapsedTime / 60) % (60)),
seconds=int(elapsedTime % 60)))
print("Finished")
文章来源:https://blog.csdn.net/qq_44324007/article/details/135193122
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于卡尔曼滤波的声源跟踪方法研究
- 蓝牙网关G602
- 1.4~1.5链表复习,代码操作(反转链表(用栈解决,双指针),删除链表指定元素),链表选择题,广义表
- java--异常 综合练习1
- 一篇文章学会如何使用 NestJS 的中间件,让你的应用更灵活和可扩展
- js json 生成 字段注释
- 全系统插件一览,全部系统都可以使用的插件,系统是源码交付,支持二开!
- 基于内容分析法的近五年667信息管理导论真题演变规律研究
- 世微AP8851L 10-100V 3A宽电压降压dc-dc电源管理芯片
- pytorch 语义分割前后处理代码详解