【2024】OAK智能深度相机校准教程
编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多👍???
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
▌前言
Hello,大家好,这里是OAK中国,我是Ashely。
近期我们更新了校准程序和方式,让OAK相机的精度有所提升。大家如果手里用的是旧设备,可以根据本教程来重新校准设备,精度可能会好点。
目前支持的校准程序:
- 深度校准
- ToF校准
如果你用的是非ToF款相机,请只看“深度校准”这一部分即可。
▌深度校准
相机校准是确定相机的固有、外在和畸变参数的过程。相机需要这些才能将 3D 世界中的点映射到图像中的 2D 点,反之亦然,以消除图像失真,并从立体图像中确定深度。
根据这些参数,相机还计算出用于校正(对齐)立体相机的图像的校正矩阵,因此 StereoDepth 节点可以执行立体视差计算和深度估计。
注意!所有带外壳的OAK相机在出厂前就完成了校准,除非你对校准的精度不满意,否则不用再自己重新校准一次。
分体式OAK-FFC系列的产品,在完成安装后,必须做校准。
以下是一个校准步骤的演示视频,有关校准的更多信息查看以下步骤以及?./calibrate.py --help?将打印出所有校准选项的步骤。
【2023】用新程序校准OAK双目相机教程
须知
你的电脑需要安装depthai,可通过以下方式安装:
git clone https://github.com/luxonis/depthai.git
cd depthai
git submodule update --init --recursive
python3 install_requirements.py
准备charuco标定板
我们通过将 charuco 板显示在电视或大型(平面,非曲面)显示器上找到了最佳效果。屏幕越大越好,因为它们允许在图像中显示更多的字符标记,这通常会提高校准精度。根据屏幕尺寸(对角线,以英寸为单位),我们建议全屏显示以下charuco板:
- 24寸屏幕:charuco_24inch_13x7
- 28寸屏幕:charuco_28inch_15x8
- 32寸屏幕:charuco_24inch_17x9
- 36寸屏幕:charuco_36inch_19x11
- 42寸屏幕:charuco_42inch_22x12
- 50寸屏幕:charuco_24inch_27x15
- 55寸屏幕:charuco_55inch_30x17
- 65寸屏幕:charuco_65inch_35x20
- 75寸屏幕:charuco_75inch_41x23
如果你用的是其他尺寸的屏幕,建议选比屏幕稍小的charuco板。
如果无法在显示器上显示charuco板,你可以将板打印到平坦的表面上(如PVC板货KT板),没有褶皱或凹凸。你也可以将其打印到一张纸上并将其粘在坚固、平坦的表面上。材质不要太反光!
我们更推荐的方式是打印在KT板上,就像我们视频中用的那种。
屏显charuco板
全屏显示charuco板时,标记和方块应清晰可见。注意以下几点:
- 屏幕不应太亮(或太暗),因为它会导致图像过度饱和,这将使相机更难检测到标记。
- 不要让明亮的灯光/阳光直接照射在屏幕上。
- 全屏显示charuco板,使标记尽可能大。

接下来测量?charuco 板的正方形尺寸,因为我们稍后会用到它。

配置json文件
如果你用的是带外壳的OAK相机,则可以直接用现成的配置。(查看)
如果你用的是一个分体式OAK-FFC相机,则可以用这个模板去配置json文件,修改一些参数数值。参数解释看下图。

运行校准脚本
将占位符参数值替换为有效条目:
python3 calibrate.py -s [SQUARE_SIZE_IN_CM] --board [BOARD] -nx [squaresX] -ny [squaresY]例如,在32‘’屏幕上校准OAK-D-S2,正方形尺寸为3.76cm,应该运行如下命令:
python3 calibrate.py -s 3.76 --board OAK-D-S2 -nx 17 -ny 9如果没有RGB镜头,可以加-drgb,如下:
python3 calibrate.py -s 3.76 --board OAK-FFC-4P -nx 17 -ny 9 -drgb运行python3?calibrate.py?--help可以查看更多参数解释。
校准期间的相机定位
我们建议从不同的角度和距离捕获校准,因为这将有助于校准算法找到最佳校准。
1.靠近屏幕:校准板几乎覆盖了整个视场。拍摄 5 张照片以覆盖相机的整个 FOV。
1)前视图,FOV中间的校准板(参考下图)。

2)在不移动(平移)相机的情况下,只需旋转即可将相机 FOV 与校准板边缘对齐(例如:右下角、左上角、右上角、左下角)

2.靠近屏幕:从侧面。校准板倾斜的 4 张或更多图像,但仍覆盖大部分FOV。将相机移动到屏幕的顶部、底部、左侧和右侧。你也可以使用不同的距离。
3.中距离:校准板覆盖 40% 的 FOV。拍摄 5 张图像以覆盖相机的整个 FOV。
1)前视图,FOV中间的校准板。

2)与?2.靠近屏幕?一样,无需移动,仅通过旋转将相机 FOV 与校准板边缘对齐。
4.远离屏幕:校准板仅覆盖 FOV 的一小部分。总共拍摄 9 张图像以覆盖相机的整个 FOV。
1)正面视图,FOV中间的校准板。

2)与?2.靠近屏幕?类似,拍摄 4 张图像,将相机 FOV 对齐到所有 4 个边缘。

3)除了与所有 4 个边缘对齐外,还要拍摄 4 张与角对齐的图像(例如:顶部、底部、左侧、右侧)。

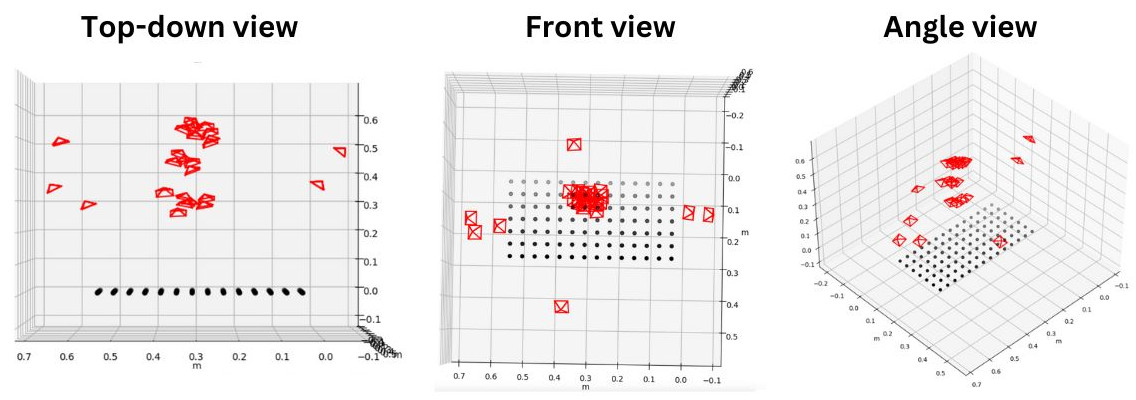
校准期间不同的相机旋转/位置,鸟瞰图。

例如,28寸屏幕,近距离50CM,远距离1M。
正常视角的OAK相机参考位置图:

广角的OAK相机参考位置图:
运行校准
捕获图像后,我们可以运行校准。这是通过按?s?键完成的。该脚本将显示每个图像的 epiplolar 线条,您应该检查它们是否正确对齐。检查完所有图像后,校准结果(如果成功)将闪烁到器件EEPROM上。每个捕获的图像都保存在?dataset?文件夹中,因此您可以自行重新运行校准过程,而无需再次捕获图像。
python3 calibrate.py -s 3.76 --board OAK-D-S2 -nx 17 -ny 9 -m process校准结果存储在 resources 文件夹中,以后可用于测试/调试目的。你还可以将此本地校准文件加载/刷新到设备(详情请参阅此处)。
问题排查
如果校准失败并出现错误:?High?reprojection?error!?,通常的原因是电路板配置错误。很多时候,这是由于使用过的相机模块的指定 HFOV 不正确。
如果你发现尽管成功校准了相机并确认了外极线正确左右对齐,但深度仍然不正确,则可能是你的左右相机互换了。在这种情况下,你可以使用更改的电路板配置重试校准,或者直接更换相机插入的电路板插座。
▌ToF校准
飞行时间(ToF)校准对于将ToF传感器与系统中的其他相机对齐至关重要。此过程侧重于获取外部参数,这对于确保不同相机之间的协调操作至关重要。请注意,此校准不会提高深度精度,因为该方面由设备的固件管理。
校准程序
如果你已经安装了 DepthAI 库,则可以使用以下命令更新它以进行 TOF 校准:
git checkout new_tof_calib
git submodule update --init --recursive安装更新的 DepthAI Python 库:
python3 .\install_requirements.py要开始校准过程,请使用你正在使用的 Charuco 板的适当参数运行 calibrate.py。例如:
python3 calibrate.py -db -nx 12 -ny 9 -c 1 -cd 0 -s 6 -ms 4.7 -brd OAK-D-SR-POE参数解释如下:
- -db:表示默认板,表示你正在使用 Charuco 标记。
- -nx:x 方向上的 Charuco 标记数。
- -c:每次显示多边形时拍摄的照片数量(可选,建议在你的情况下省略)。
- -cd:拍摄照片前的倒计时时间(以秒为单位)(可选,建议用于更快的图像校准)。
- -s:Charuco 标记周围的正方形大小(以厘米为单位)。
- -ms:标记的大小(以厘米为单位)。
- -brd:设备的板(在本例中为 OAK-D-SR-POE)。
请注意,TOF校准可能具有挑战性,因为电路板必须靠近相机才能检测Charuco电路板。如果遇到?division?by?zero?或?Failed?to?detect?markers?in?the?image?dataset/rgb/rgb_p3_10.png?等错误,则应转到数据集文件夹并删除 Charuco 板检测不佳的图片(在所有相机文件夹中)。然后,使用添加的参数?-m?process?再次运行相同的代码。这将仅启动处理阶段,因此你不必重新拍摄电路板的照片。
python3 calibrate.py -db -nx 12 -ny 9 -c 1 -cd 0 -s 6 -ms 4.7 -brd OAK-D-SR-POE -m process本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- HTTP协议
- 如何使用JavaScript检测文件类型?
- Python使用CBC加密模式进行AES加密
- 6 个合法学习黑客技术网站,不用担心查水表!
- MyBatis-Plus 可视化代码生成器
- three.js从入门到精通系列教程007 - three.js绘制空心扇形和实心扇形
- postgresql12表膨胀解决(不锁表)
- 开源音频处理代码 speex
- GAMES101-Lec10~12几何 曲线 曲面网格
- 《工具箱-SVN》SVN安装、备份、迁移教程