Jarvis步进法(Jarvis March)凸包算法
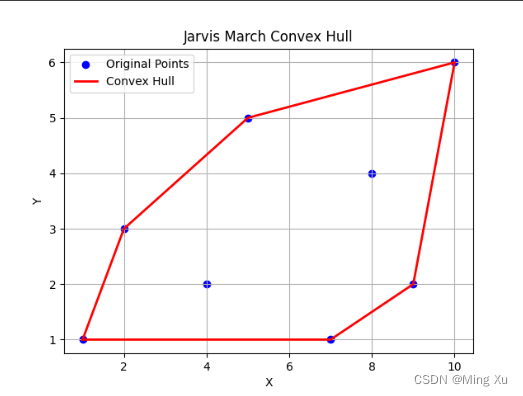
Jarvis步进法(也称为包裹法): Jarvis步进法是一种逐步选择凸包顶点的算法。从点集中选择一个起始点,然后在每一步中选择下一个顶点,该顶点是当前点集中与当前点形成的线段上,极角最小的点。该算法的时间复杂度为O(nh),其中n是点的数量,h是凸包的顶点数。请帮我使用 python 实现该算法,并且绘制出原始的离散点和凸包的点并连接成凸包多边形
Jarvis步进法(Jarvis March),又称为包裹法(Gift Wrapping),是一种求解平面点集凸包问题的算法。凸包是包含给定点集合的最小凸多边形。以下是Jarvis步进法的基本数学原理:
-
选择起始点: 算法首先需要选择一个起始点。通常情况下,选择最左下角的点,以确保算法的稳定性。选择起始点的过程可以通过遍历点集,找到y坐标最小的点,并在y坐标相同时,选择x坐标最小的点。
-
极角排序: 在选择了起始点之后,对剩余的点按照相对于当前点的极角进行排序。极角可以使用反正切函数(atan2)计算,它表示从当前点到其他点的线段与x轴正方向之间的夹角。排序后的点集顺序将决定扫描过程中点的访问顺序。
-
扫描过程: 从起始点开始,选择当前点(假设为p),然后选择下一个点(假设为q),这个点是当前点p与其他点形成的线段上,极角最小的点。通过比较极角大小,可以确定下一个点的选择。重复这个过程,直到回到起始点形成一个闭合的凸包。
-
构建凸包: 扫描完成后,选择的点序列就是凸包的顶点,这个顺序是按照逆时针方向排列的。
关键思想是通过在每一步中选择具有最小极角的点,逐步构建凸包。这样可以确保在构建的凸包上,点的极角是递增的,最终形成一个逆时针方向的凸多边形。算法的时间复杂度主要取决于对点的排序操作,通常为O(n log n),其中n是点的数量。 Jarivs步进法的优势在于其相对简单的实现和较好的性能。然而,在某些情况下,例如存在大量共线点的情况下,算法的性能可能会下降。
import matplotlib.pyplot as plt
import numpy as np
class Point:
def __init__(self, x, y):
self.x = x
self.y = y
def orientation(p, q, r):
val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y)
if val == 0:
return 0 # 平行
return 1 if val > 0 else 2 # 顺时针或逆时针
def jarvis_march(points):
n = len(points)
if n < 3:
print("Jarvis March requires at least 3 points.")
return []
hull = []
# 找到最左下角的点作为起始点
start_point = min(points, key=lambda p: (p.y, p.x))
current_point = start_point
while True:
hull.append(current_point)
next_point = points[0]
for candidate_point in points:
if candidate_point != current_point:
if next_point == current_point or orientation(current_point, next_point, candidate_point) == 2:
next_point = candidate_point
current_point = next_point
if current_point == start_point:
break
return hull
def plot_convex_hull(points, convex_hull):
x_values = [point.x for point in points]
y_values = [point.y for point in points]
hull_x = [point.x for point in convex_hull]
hull_y = [point.y for point in convex_hull]
hull_x.append(convex_hull[0].x) # 闭合凸包
hull_y.append(convex_hull[0].y)
plt.scatter(x_values, y_values, color='blue', label='Original Points')
plt.plot(hull_x, hull_y, color='red', linestyle='-', linewidth=2, label='Convex Hull')
plt.legend()
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Jarvis March Convex Hull')
plt.grid(True)
plt.show()
# 示例点集
new_points = [Point(1, 1), Point(2, 3), Point(4, 2), Point(5, 5), Point(7, 1), Point(8, 4), Point(9, 2), Point(10, 6)]
# 计算凸包
new_convex_hull_points = jarvis_march(new_points)
# 绘制原始离散点和凸包
plot_convex_hull(new_points, new_convex_hull_points)
#include <iostream>
#include <vector>
#include <algorithm>
class Point {
public:
double x, y;
Point(double _x, double _y) : x(_x), y(_y) {}
// 定义 == 运算符
bool operator==(const Point& other) const {
return (x == other.x) && (y == other.y);
}
// 定义 != 运算符
bool operator!=(const Point& other) const {
return !(*this == other);
}
};
int orientation(const Point& p, const Point& q, const Point& r) {
double val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y);
if (val == 0) return 0; // 平行
return (val > 0) ? 1 : 2; // 顺时针或逆时针
}
std::vector<Point> jarvisMarch(const std::vector<Point>& points) {
size_t n = points.size();
if (n < 3) {
std::cerr << "Jarvis March requires at least 3 points." << std::endl;
return std::vector<Point>();
}
std::vector<Point> hull;
Point start_point = *std::min_element(points.begin(), points.end(),
[](const Point& p1, const Point& p2) {
return (p1.y < p2.y) || (p1.y == p2.y && p1.x < p2.x);
});
Point current_point = start_point;
while (true) {
hull.push_back(current_point);
Point next_point = points[0];
for (const auto& candidate_point : points) {
if (candidate_point != current_point) {
if (next_point == current_point || orientation(current_point, next_point, candidate_point) == 2) {
next_point = candidate_point;
}
}
}
current_point = next_point;
if (current_point == start_point) {
break;
}
}
return hull;
}
int main() {
// 示例点集
std::vector<Point> newPoints = { {1, 1}, {2, 3}, {4, 2}, {5, 5}, {7, 1}, {8, 4}, {9, 2}, {10, 6} };
// 计算凸包
std::vector<Point> newConvexHullPoints = jarvisMarch(newPoints);
// 打印凸包点信息
std::cout << "Convex Hull Points:" << std::endl;
for (const auto& point : newConvexHullPoints) {
std::cout << "(" << point.x << ", " << point.y << ")" << std::endl;
}
return 0;
}

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!