Pythpn实现匀速直线运动图像复原
发布时间:2024年01月20日
匀速直线运动图像复原
1.代码
1.主要是使用逆滤波和维纳滤波进行图像复原,以及两者的一个对比
import matplotlib.pyplot as plt
import numpy as np
from numpy import fft
import math
import cv2
# 仿真运动模糊
def motion_process(image_size, motion_angle):
PSF = np.zeros(image_size)
print(image_size)
center_position = (image_size[0] - 1) / 2
print(center_position)
slope_tan = math.tan(motion_angle * math.pi / 180)
slope_cot = 1 / slope_tan
if slope_tan <= 1:
for i in range(15):
offset = round(i * slope_tan) # ((center_position-i)*slope_tan)
PSF[int(center_position + offset), int(center_position - offset)] = 1
return PSF / PSF.sum() # 对点扩散函数进行归一化亮度
else:
for i in range(15):
offset = round(i * slope_cot)
PSF[int(center_position - offset), int(center_position + offset)] = 1
return PSF / PSF.sum()
# 对图片进行运动模糊
def make_blurred(input, PSF, eps):
input_fft = fft.fft2(input) # 进行二维数组的傅里叶变换
PSF_fft = fft.fft2(PSF) + eps
blurred = fft.ifft2(input_fft * PSF_fft)
blurred = np.abs(fft.fftshift(blurred))
return blurred
def inverse(input, PSF, eps): # 逆滤波
input_fft = fft.fft2(input)
PSF_fft = fft.fft2(PSF) + eps # 噪声功率,这是已知的,考虑epsilon
result = fft.ifft2(input_fft / PSF_fft) # 计算F(u,v)的傅里叶反变换
result = np.abs(fft.fftshift(result))
return result
def wiener(input, PSF, eps, K=0.01): # 维纳滤波,K=0.01
input_fft = fft.fft2(input)
PSF_fft = fft.fft2(PSF) + eps
PSF_fft_1 = np.conj(PSF_fft) / (np.abs(PSF_fft) ** 2 + K)
result = fft.ifft2(input_fft * PSF_fft_1)
result = np.abs(fft.fftshift(result))
return result
image = cv2.imread('lena2.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 转换为灰度图像
img_h = image.shape[0]
img_w = image.shape[1]
plt.figure(1)
plt.xlabel("Original Image")
plt.gray()
plt.imshow(image) # 显示原图像
plt.figure(2)
plt.gray()
# 进行运动模糊处理
PSF = motion_process((img_h, img_w), 60)
blurred = np.abs(make_blurred(image, PSF, 1e-3))
plt.subplot(231)
plt.xlabel("Motion blurred")
plt.imshow(blurred)
result = inverse(blurred, PSF, 1e-3) # 逆滤波
plt.subplot(232)
plt.xlabel("inverse deblurred")
plt.imshow(result)
result = wiener(blurred, PSF, 1e-3) # 维纳滤波
plt.subplot(233)
plt.xlabel("wiener deblurred(k=0.01)")
plt.imshow(result)
blurred_noisy = blurred + 0.1 * blurred.std() * \
np.random.standard_normal(blurred.shape) # 添加噪声,standard_normal产生随机的函数
plt.subplot(234)
plt.xlabel("motion & noisy blurred")
plt.imshow(blurred_noisy) # 显示添加噪声且运动模糊的图像
result = inverse(blurred_noisy, PSF, 0.1 + 1e-3) # 对添加噪声的图像进行逆滤波
plt.subplot(235)
plt.xlabel("inverse deblurred")
plt.imshow(result)
result = wiener(blurred_noisy, PSF, 0.1 + 1e-3) # 对添加噪声的图像进行维纳滤波
plt.subplot(236)
plt.xlabel("wiener deblurred(k=0.01)")
plt.imshow(result)
plt.show()
2. 没有这个库的,需要安装这个库
3.执行结果
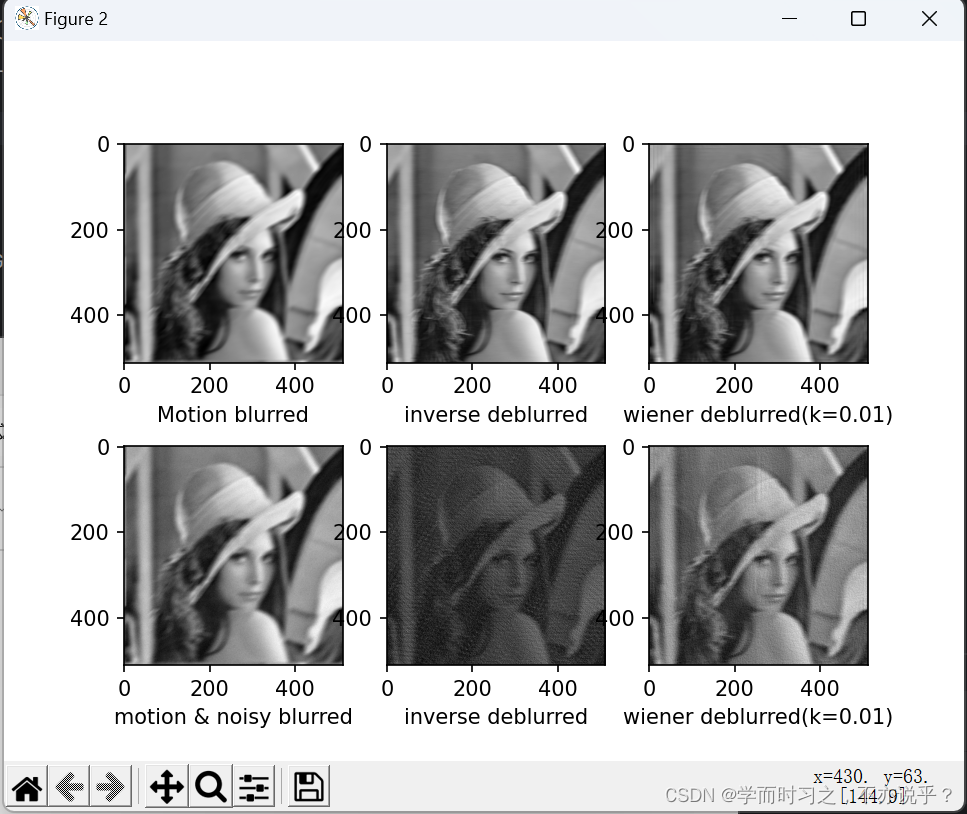
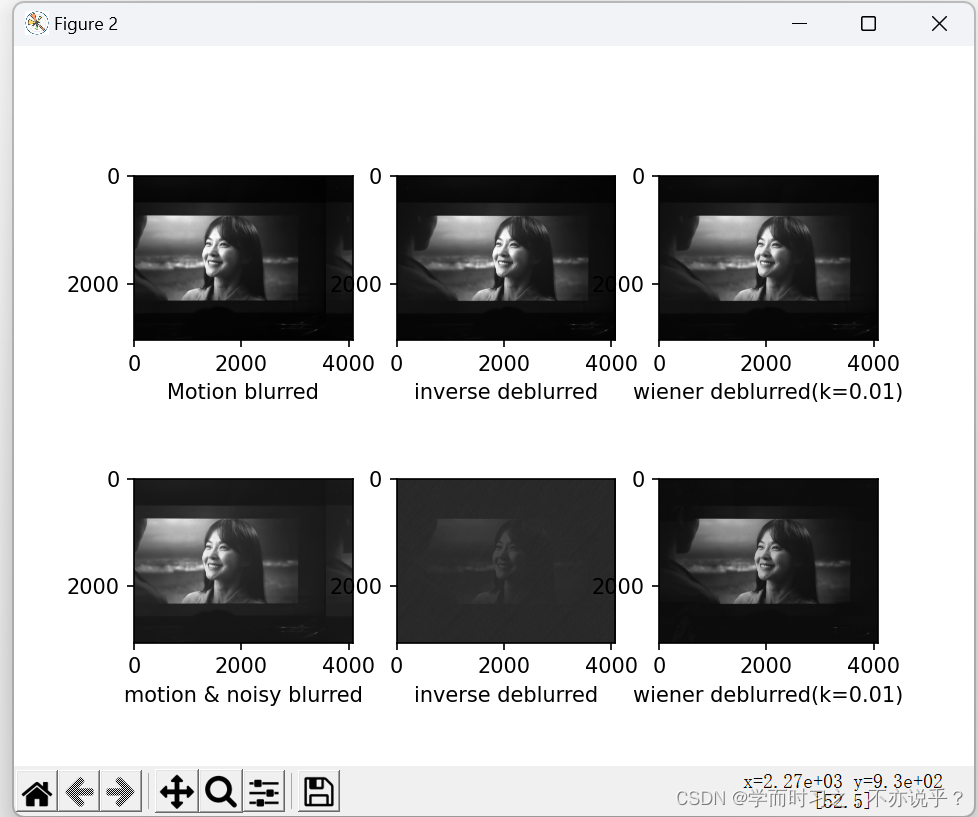
从图中可以看出:图1添加了运动模糊的图像比原图像要模糊的多,图2是在图1基础上使用逆滤波去模糊,图3是在图1基础上使用维纳滤波去模糊;图4是添加了噪声和运动模糊,图5是再图4基础上逆滤波去模糊,图6是在图4维纳滤波去模糊。
注意:建议使用第一张图片进行代码验证,第一张图片效果更为明显。图片在下面自取:

参考代码:https://blog.csdn.net/bingbingxie1/article/details/79398601
文章来源:https://blog.csdn.net/weixin_45422321/article/details/135655430
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 人工智能软件测试2024年主要趋势
- java-jpcap笔记
- C语言数据在内存中的存储
- 用通俗易懂的方式讲解:一文讲清大模型 RAG 技术全流程
- 14 STM32 - IIC (时序图+软件源码)
- 命令行艺术:简洁指南,效率倍增 | 开源日报 No.136
- 新版云进销存ERP销售库存仓库员工管理系统源码
- 构建SaaS数据分析和反馈体系的最佳实践
- C# 比较两个数组的内容是否完全一样
- 【Gene Expression Prediction】Part3 Deep Learning in Gene Expression Analysis