超维空间M1无人机使用说明书——53、ROS无人机二维码识别与降落——V2升级版本
发布时间:2024年01月10日
引言:使用二维码引导无人机实现精准降落,首先需要实现对二维码的识别和定位,可以参考博客的二维码识别和定位内容。本小节主要是通过获取拿到的二维码位置,控制无人机全向的移动和降落,本小节再V1版本的基础上增加了动态调整,即无人机可以降落到动态移动的二维码标签上。基本原理就是无人机在降落的过程中,仍然不断地进行位置地调整,确保无人机能够实时地保持正对着静止或者移动的二维码。
源码链接
一、启动二维码识别与降落程序
roslaunch robot_bringup v2_ar_track_landing.launch
未出现红色报错,表明程序运行正常
launch文件详解
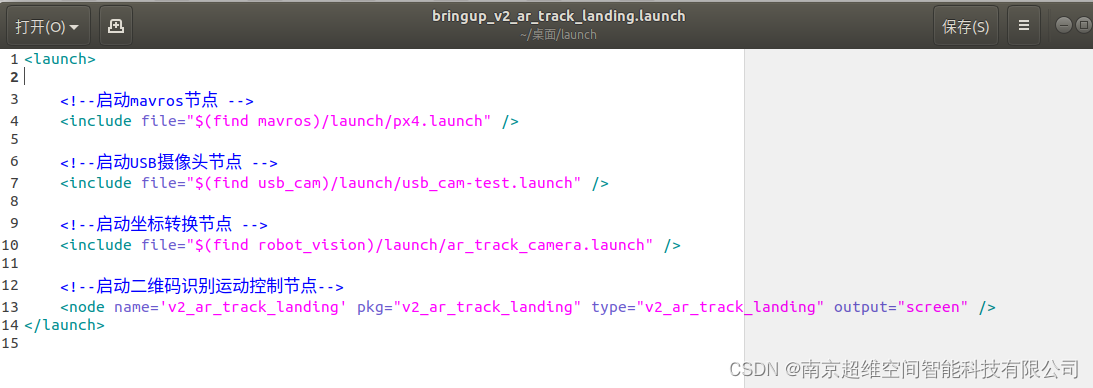
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动二维码识别节点,以话题方式发布识别到的二维码位置信息
4、启动运动控制节点,该节点定位实时的二维码位置信息,进行运动控制
二、视频演示
注:此处视频是采用边降落边调整的方式,是本小节的升级版程序
视频演示: 二维码降落
文章来源:https://blog.csdn.net/qq_35598561/article/details/135509122
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Vue 3 打印解决方案:Vue-Plugin-HiPrint
- es、MySQL 深度分页问题
- 游戏录屏工具大揭秘,哪一款才是你的菜?
- Vue3中hooks函数封装和使用
- SGL-110型定时限过流继电器 额定电流5A 额定电压220V 交直流通用 板前接线
- 酷狗音乐逆向(js逆向)
- 【Java IO】设计模式 (装饰者模式)
- 农业气象站的工作原理!
- 打破微软封印面向未来创建.NET Framework4.8工程
- WPF Blend for visual studio使用