STM32标准库开发—MPU6050详细介绍
MPU6050简介

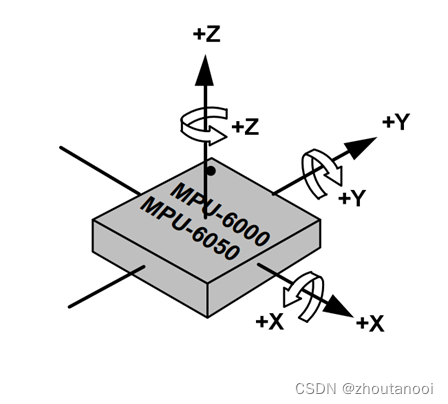
3轴IMU即只有3轴陀螺仪的IMU,其因为只有一个3轴陀螺仪,所以只能感知载体roll(滚转)、pitch(俯仰)、yawl(偏航)共3个自由度的姿态信息。
6轴IMU在3轴IMU的基础上加装了3轴加速度计,因此在感知载体姿态的基础上,还能感知载体3个自由度上的加速度信息。
9轴IMU在6轴IMu的基础上加装了3轴磁强计,由于3轴陀螺仪只能估计载体自身的相对位姿变化(通过加速度计也可获得载体的绝对roll和pitch),单凭3轴陀螺仪无法获取载体的全部姿态信息,而通过3轴磁强计就可以,本质上磁强计的感知原理类似于指南针。
10轴IMU就是在9轴基础上加上压力传感器,用于检测高度
更多信息参考可以参考这篇博客
https://blog.csdn.net/zack_liu/article/details/112308535
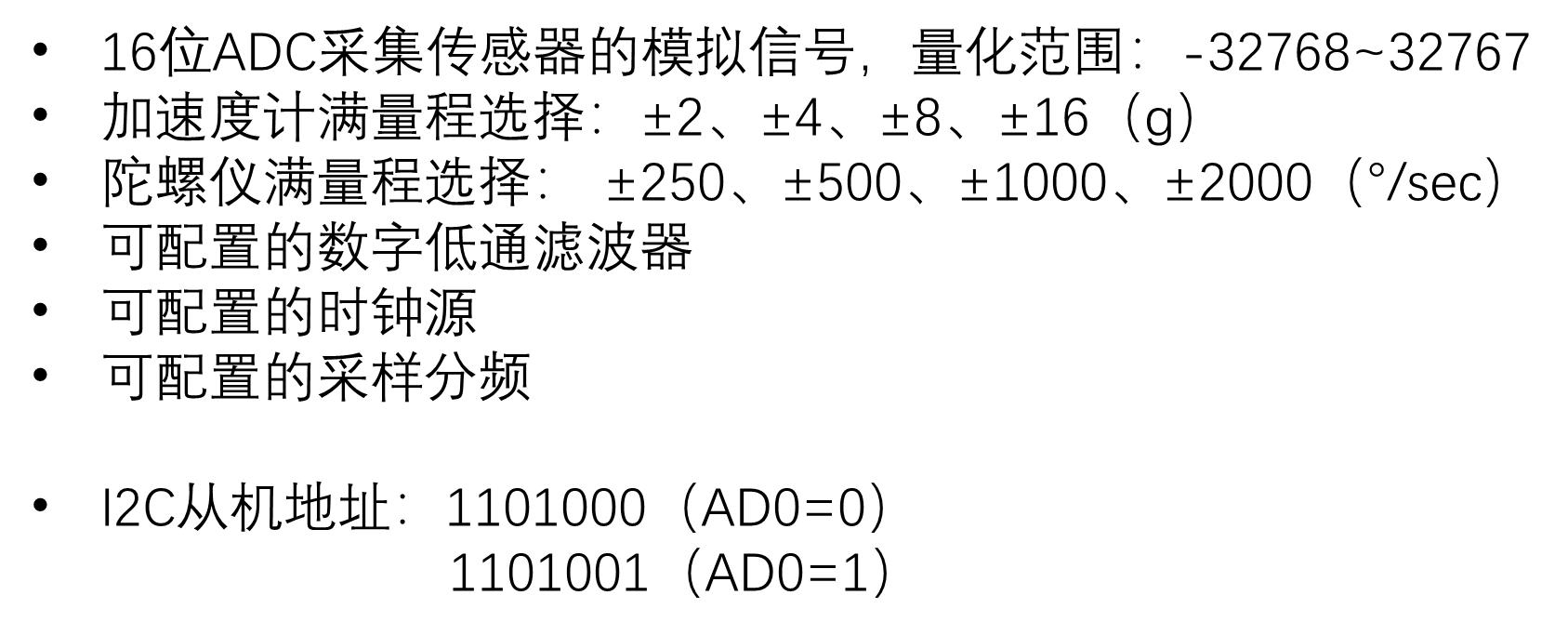
MPU6050参数
MPU6050硬件电路
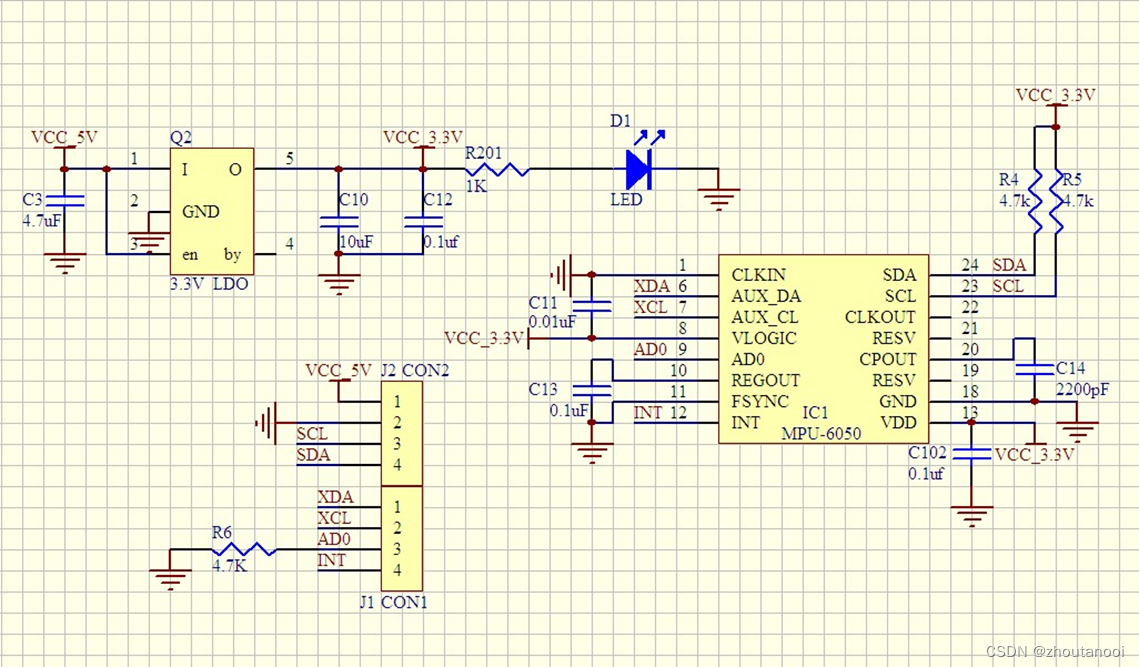
SCL,SDA,自带上拉电阻,因此可以直接与最小系统版连接,不用外接上拉电阻
AUX_DA,AUX_CL是拓展I2C引脚,可外接一个磁力计,气压计,使得MPU6050可以直接读取这些数据
AD0用于设置从机地址的最低位,当有多个相同设备时地址冲突才需要配置
INT用于中断信号输出,MPU6050可以配置芯片内部的一些事件触发中断输出
MPU6050框架图
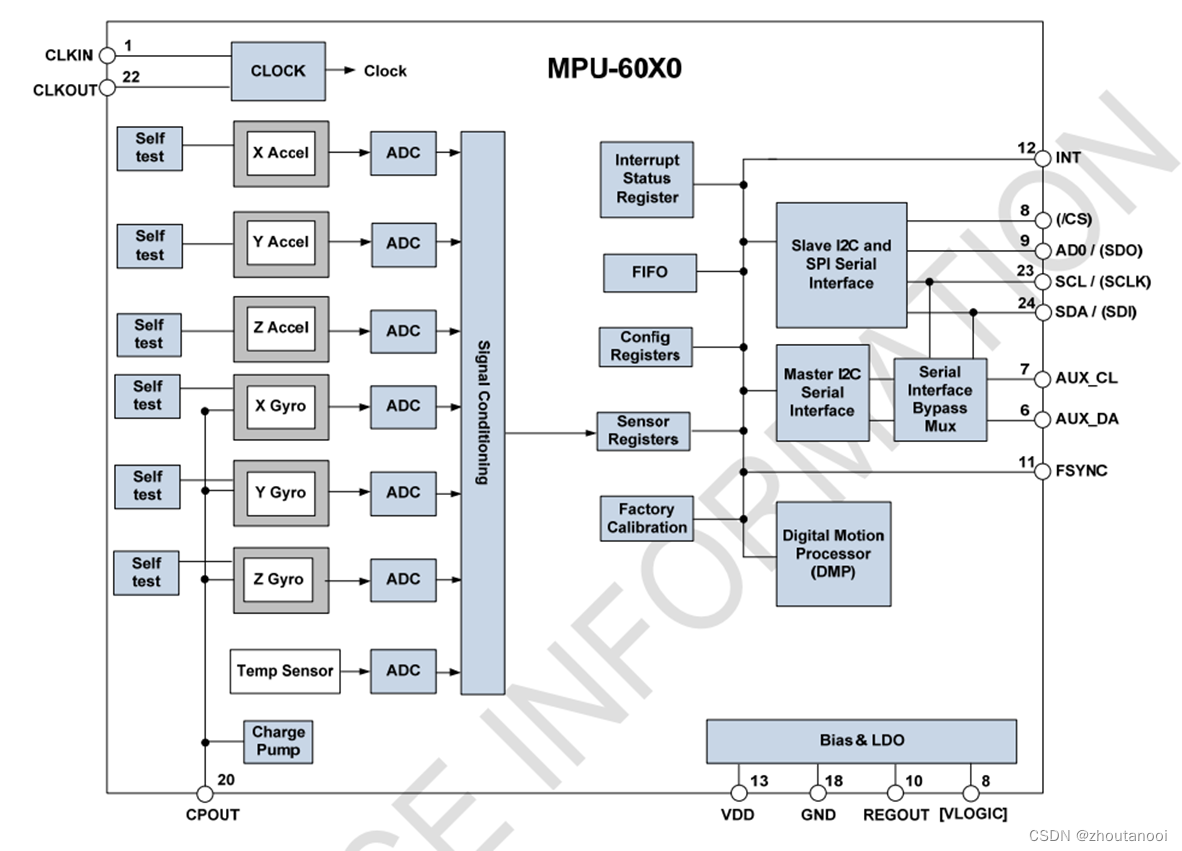
时钟系统有时钟输入脚和时钟输出脚,一般使用内部时钟
MPU6050自带温度传感器,使用方法与加速度计,陀螺仪使用方式一致
最左侧是自测单元,通过使能自测与失能自测,来判断芯片的好坏.
Charge Pump是电荷泵用于升压,主要为陀螺仪供电
SensorRegisters是传感器寄存器,存储了左侧各个传感器的数据
DMP是内置的姿态检测,用于姿态解算
SerialInterfaceBypassMux(旁路选择器)可以设置是否启用拓展I2C接口
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- stm32学习总结:5、Proteus8+STM32CubeMX+MDK仿真串口并使用串口打印日志(注意重定向printf到串口打印的问题)
- 序列化机制以及应用场景
- git上面中新建gitignore文件,并且去除已经在仓库版本管理中的文件夹
- 第二百一十回
- 设计模式——建造者模式(创建型)
- VCG 添加自定义属性
- 免费SSL证书靠谱吗?
- 友元,友元类——类和对象
- C练习——递归打印无符号整型数
- 短剧成为今年最火赛道,短剧分销系统怎么开发?