动手做个无人机—材料篇
基于浙江大学Fast-Lab(高飞,潘能)和深蓝学院合作课程:第二课:动力套焊接_哔哩哔哩_bilibili
?无人机材料1:
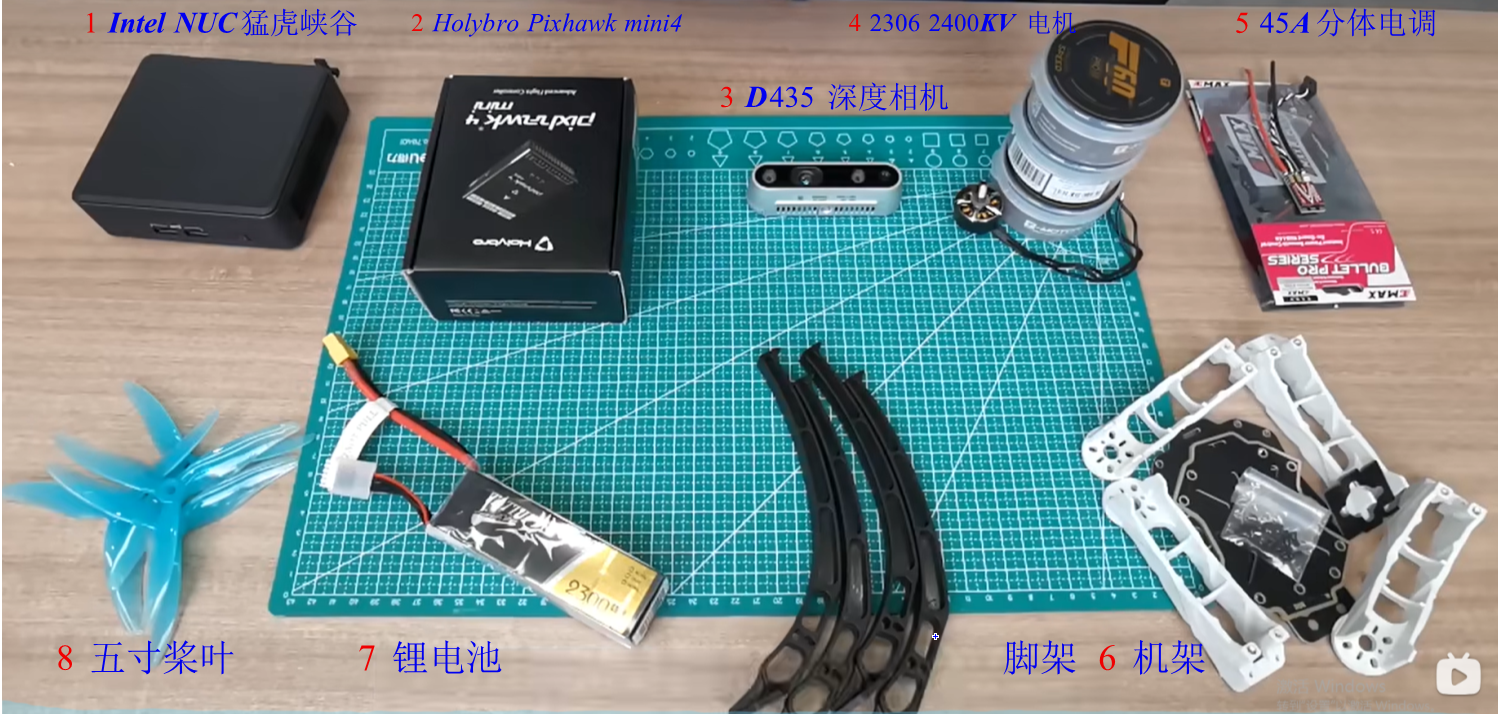
1、NUC 猛虎峡谷? 准系统 i5薄款:?一款机载电脑,使用i5-1135G7 ,最大内存64G,核心4,线程8,三级缓存8M,最大计算能力约3TFLOPS(每秒万次浮点计算能力)。因为该款无人机需要基于深度学习的目标检测,需要较高的算力,而以树莓派4为例,它配备了博通BCM2711 SoC,算力不足1TFLOPS。而如果使用无线的近端边缘计算,延迟存在一个问题,所以搭配一个机载电脑是一个优选,该款电脑性价比较高,且高飞老师团队所设计的课程环境配置、代码部署只针对NUC。初学者不建议换其他型号的机载电脑。
2、Pixhawk mini4:一款飞行控制软硬件集成产品,研发的算法嵌入此处。但该款产品缺货,可以替换成CUAV的V5 NANO或者完全版的holybro pixhawk4,此外CUAV的V5+,X7也可以。
3、d435深度相机:结合了一个深度传感器、RGB传感器以及一个红外发射器,能够捕捉三维空间的信息。作为视觉的输入。
4、2304 2400KV电机:23通常表示定子直径为23毫米,06表示定子高度为6毫米,2400KV意味着在1伏特电压下电机的空载转速是2400转/分钟(RPM)。这种电机可与特定电压的电池兼容,比如2S到6S(7.4伏至22.2伏)的锂聚合物(LiPo)电池。
5、45A分体电调:最大电流为45A,电调根据PWM信号的宽度调节流向电机的电流,控制电机转速。
6、机架/脚架:机架或脚架是指支撑主体结构的框架。
-
中心板:这是安装电池和飞控硬件的主要平台,也是各个臂架的连接点。
-
臂架:这些扩展出的部分为电机提供安装点。在四轴无人机中,通常有四个臂架,每个臂架末端有一个电机安装点。
-
电机安装座:位于臂架末端,用于固定电机,并保证电机能在适当的角度和高度运行。
-
起落架或脚架:这是机架的一部分,让无人机能够安全起飞和降落,同时保护机身和搭载的设备,如相机。
-
附件安装点:用于安装附加设备,如摄像机、照明、GPS模块等。
7、2300mAH 4S 电池:2300mAh意味着在提供2300毫安电流的情况下,理论上电池可以工作一小时。4S意味着有4个电池单元串联连接。每个单元的标准充电电压为3.7伏,因此4S LiPo电池的总充电电压为14.8伏。
8、五寸桨叶:五寸桨叶是许多竞速无人机和自由飞行(FPV)无人机的首选尺寸,因为它们提供了良好的平衡,即合理的推力和响应性。
?
无人机材料2:
材料说明:从0制作自主空中机器人-深蓝学院 - 专注人工智能与自动驾驶的学习平台
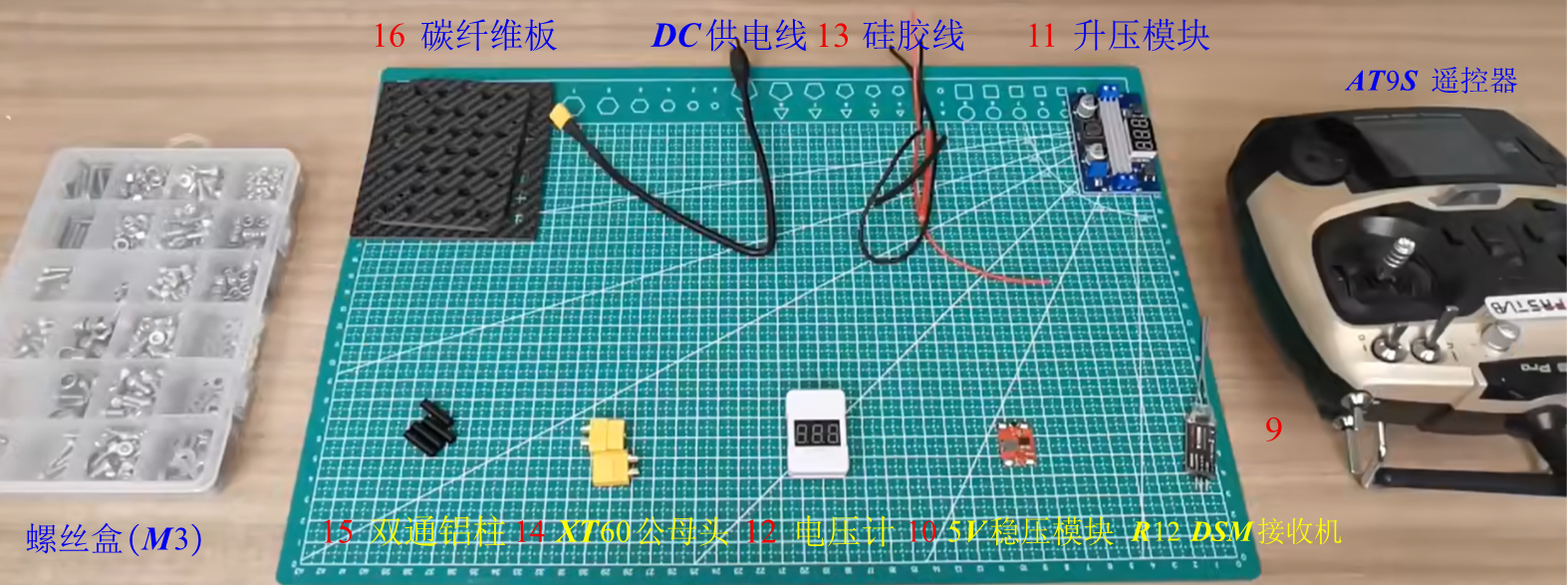
9、AT9S 遥控器/R12 DSM接收机:AT9S通常提供9个频道,这意味着它可以同时控制多达9个不同的功能,如油门、方向、俯仰、横滚等。R12DSM提供12个频道,数据传输是通过无线电波实现,使用2.4GHz DSSS&FHSS双传输频率技术。
10、5V稳压模块:本案例中四节锂电池为14.8V,但如飞控系统、接收机、舵机、摄像头和传输系统等。这些组件一般都需要一个稳定的低电压供电,5V稳压模块的主要目的是提供稳定的5伏特直流电压给这些电子设备。
11、升压模块:升压模块能够将低电压输入转换为高电压输出,但电流通常会相对减少,因为功率不变。无人机上的不同部件可能需要不同的电压水平,在电池电压下降到低于设备所需电压时,升压模块可以确保设备持续正常工作。
12、电压计:实时测量电池电压状态
13、DC供电线/硅胶线:有供电和信号传输的作用,用于无人机中连接各类电子设备,如飞控系统、动力系统(电机和电调)、电池、传感器等。DC供电线可能就是用硅胶作为绝缘材料的电线。
14、XT60公母头:用于连接电池、电调(ESC)、电机和其他电气设备,易于插拔,使得更换电池或维护电气组件变得快速且方便
15、双通铝柱:可用于两个或多个板、面板或组件之间的固定和支撑,保持它们间隔一定距离,从而形成稳定的结构框架。
16、碳纤维板:强度高,增强骨架,使其能够承受飞行中的各种压力,例如起飞、着陆和机动飞行时产生的应力,轻,减轻重量。
?所需工具:
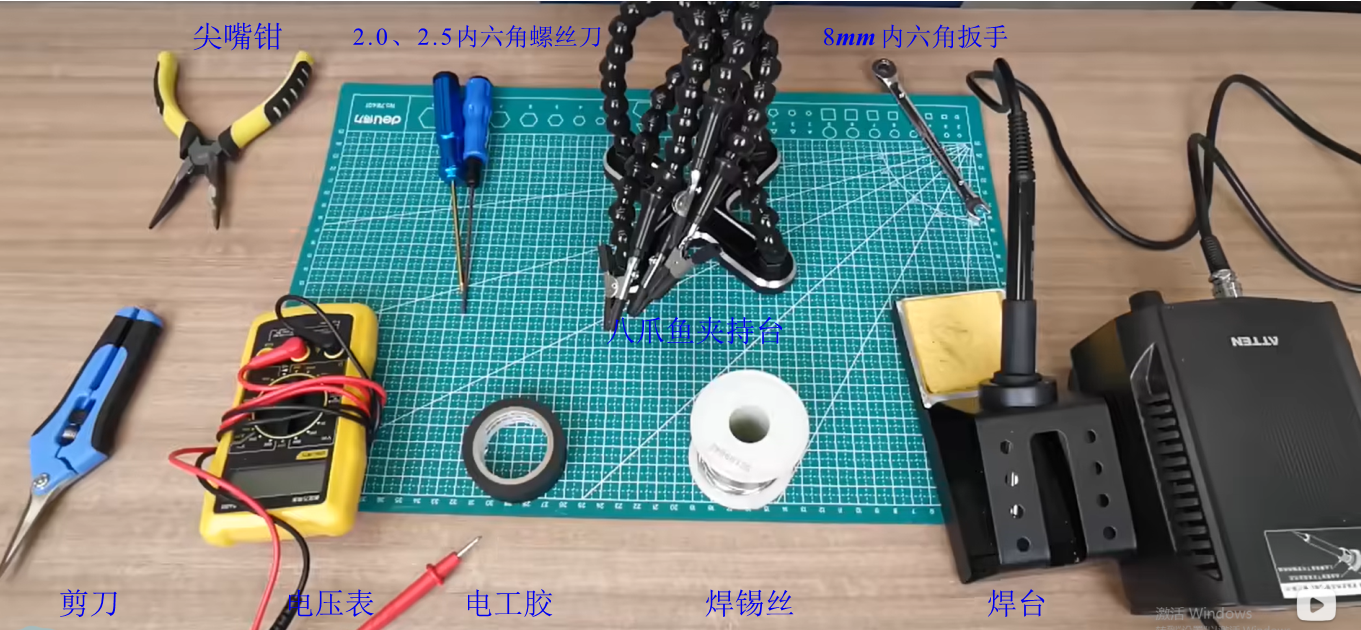
电压表使用:将黑色探针接触电路的负极或地线,将红色探针接触电路的正极。
电工胶的使用:通常需将胶带紧绷并重叠包绕在电线的绝缘层损伤处或裸露的导线上,以确保良好的绝缘效果和物理保护。
焊锡丝的使用:在焊接过程中提供填充材料,用以连接电子组件和电路板上的焊盘或导线。
焊台的使用:
-
准备工作:
- 在开始之前,请确保你的工作区域通风良好,以便排出焊接过程中产生的有害烟雾。
- 准备好焊接所需的材料和工具,如焊丝、助焊剂、焊锡吸取器、钳子、剥线器等。
-
检查电烙铁:
- 检查电烙铁头是否干净且固定良好,如有氧化或焊锡残留物,使用湿海绵或铁丝球清洁电烙铁头。
-
热身:
- 将电烙铁插入焊台并打开电源,调节至合适的温度。一般焊接电子组件的温度设置在300-350°C之间。
- 等待电烙铁达到设定温度。对于带有温度显示的焊台,可以直接从显示器上看到温度。
-
涂焊锡:
- 在电烙铁头加热的同时,在其上轻微涂抹一些焊锡,称为“上锡”,这有助于热量的传递。
-
开始焊接:
- 将电烙铁头放到需焊接的焊盘和元件引脚接触的地方,稍微加热片刻。
- 将焊锡丝靠近电烙铁头和焊点,不是直接触碰电烙铁头,这样焊锡融化后能通过热量传递流入焊点。
- 一旦焊锡足够覆盖焊盘和元件引脚,并形成良好的焊接形状,即可移开焊锡丝,然后是电烙铁头。
- 避免在焊接过程中移动元件或焊接点,以防止焊点出现冷焊。
-
清理:
- 每几次焊接之后,要清洗电烙铁头,去除氧化和多余的焊锡,确保每次焊接都有最佳的热传导和焊接质量。
-
安全操作:
- 使用焊台时请佩戴适当的个人防护设备,如防烟口罩、安全眼镜等。
- 焊接时,注意不要接触到电烙铁的热部分,以免烫伤。
-
完成后:
- 焊接完成后,将电烙铁放回焊台的支架上,并关闭电源。
- 清洁你的工作区,等待电烙铁完全冷却后再进行存放。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- BLDC 电机和 PMSM 的结构区别
- 面试 JVM 八股文五问五答第一期
- 15.三数之和(双指针,C解答附详细分析)
- 企业微信开发:自建应用:应用形态(网页,小程序,默认页面)
- 【德哥说库系列】-Clickhouse集群部署(3分片2副本)
- 多测师肖sir___接口自动化测试框架(python+request+unittest+ddt)讲解版
- (新版) Fe-Ti oxide geothermobarometer (钛铁氧化物温度计) 批量计算温度和氧逸度
- docker 脚本安装
- Python学习之路-运算符
- 初识Java并发,一问读懂Java并发知识文集(3)