多传感器融合SLAM数学学习历程
多传感器融合SLAM数学学习历程
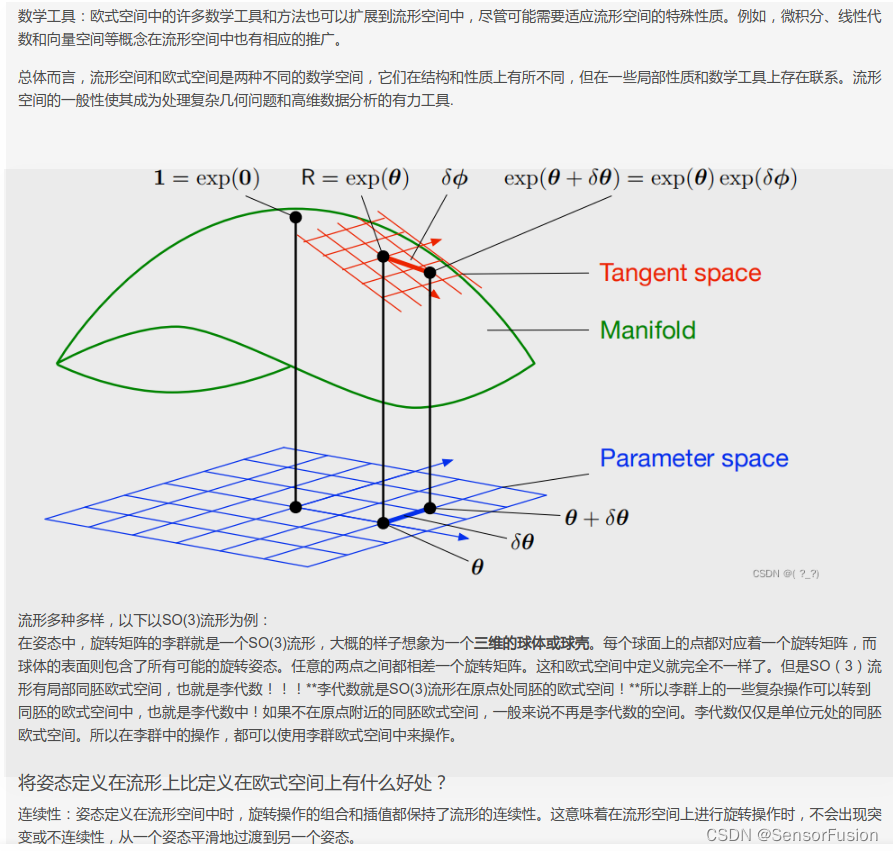
>>>流形和流形空间(姿态)
https://blog.csdn.net/professor_Xie/article/details/131911894
欧式空间和流形空间的区别和联系?
基本结构:欧式空间是我们熟悉的传统三维空间,其中的点由三个实数(x、y、z)表示,具有直角坐标系。在欧式空间中,可以进行常规的线性运算和加法操作。而流形空间是一种更一般的概念,它在局部上与欧式空间同胚,但在全局范围内可能不是直角坐标系。
维度:欧式空间的维度是固定的,例如三维欧式空间就有三个坐标轴(x、y、z)。而流形空间的维度可以是任意的,取决于流形的定义。例如,SO(3)流形是三维的,而SO(2)流形是二维的。
————————————————
版权声明:本文为CSDN博主「( ?_?)」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/professor_Xie/article/details/131911894
将姿态定义在流形上比定义在欧式空间上有什么好处?
连续性:姿态定义在流形空间中时,旋转操作的组合和插值都保持了流形的连续性。这意味着在流形空间上进行旋转操作时,不会出现突变或不连续性,从一个姿态平滑地过渡到另一个姿态。
不会出现奇异性:在流形空间上定义姿态可以避免一些奇异性问题。在欧式空间中,例如使用欧拉角时,存在万向锁问题,导致某些方向上的旋转变得不稳定。而在流形空间上,使用四元数或旋转矩阵等表示方式,可以避免这些奇异性问题,从而提高了姿态的稳定性。(欧式空间中姿态表示使用欧拉角)
避免过度参数化:姿态定义在流形空间上通常采用最小的参数化方式,例如四元数、旋转矩阵等。相比之下,在欧式空间中使用欧拉角时,可能会存在多种表示方式表示相同的旋转,导致过度参数化,增加了问题的复杂性。
保持结构特性:在流形空间上定义姿态,比如三维旋转群(SO(3)),可以保持旋转矩阵的正交性和行列式等于1的特性。这保证了旋转操作仍然是合法的旋转。
Example:
>>>李群李代数
视觉slam十四讲
https://zhuanlan.zhihu.com/p/395668394?utm_id=0
李群李代数的定义、相互间关系
李群的指数映射和对数映射
李代数求导、BCH近似、扰动模型
Sophus例程源码解析

>>>卡尔曼滤波
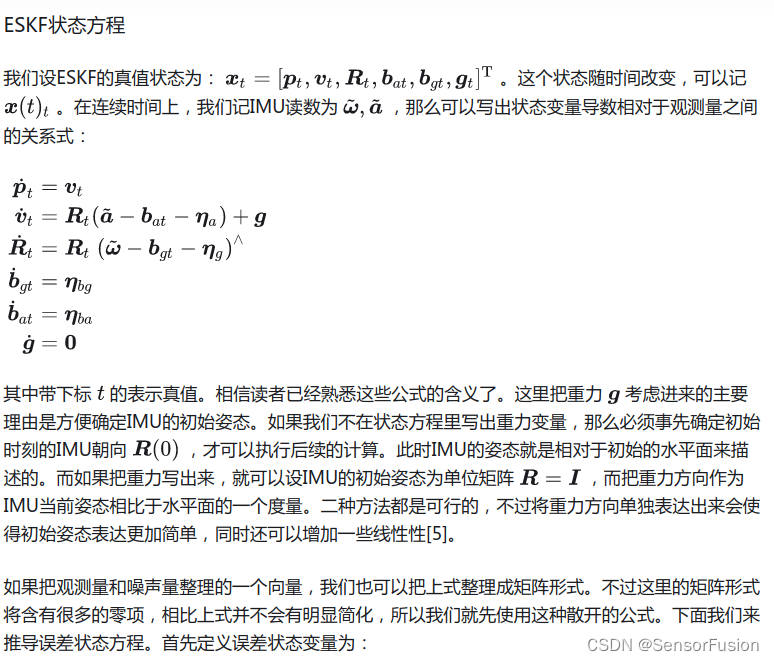
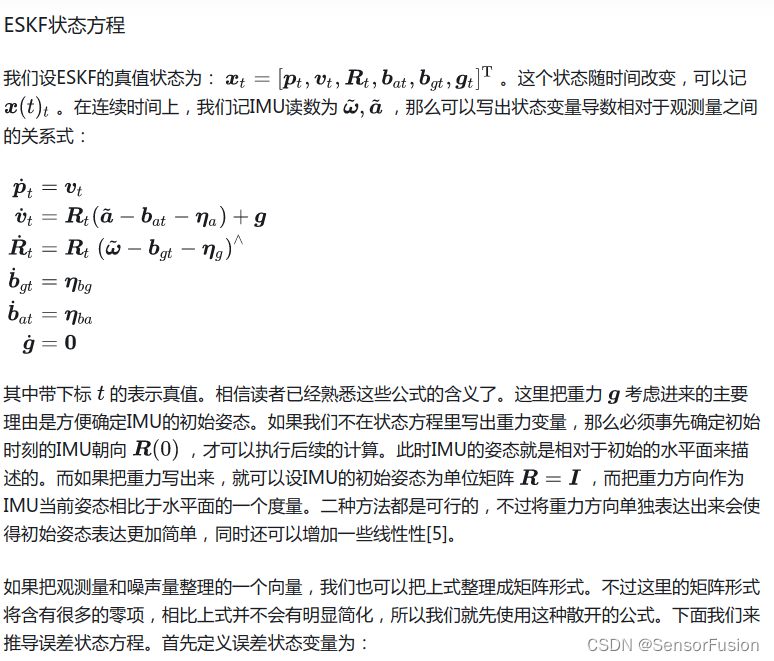
SO(3)流形上的ESKF,相比于四元数形式或欧拉角形式g=更简洁
https://blog.csdn.net/whatiscode/article/details/126242319?spm=1001.2014.3001.5501
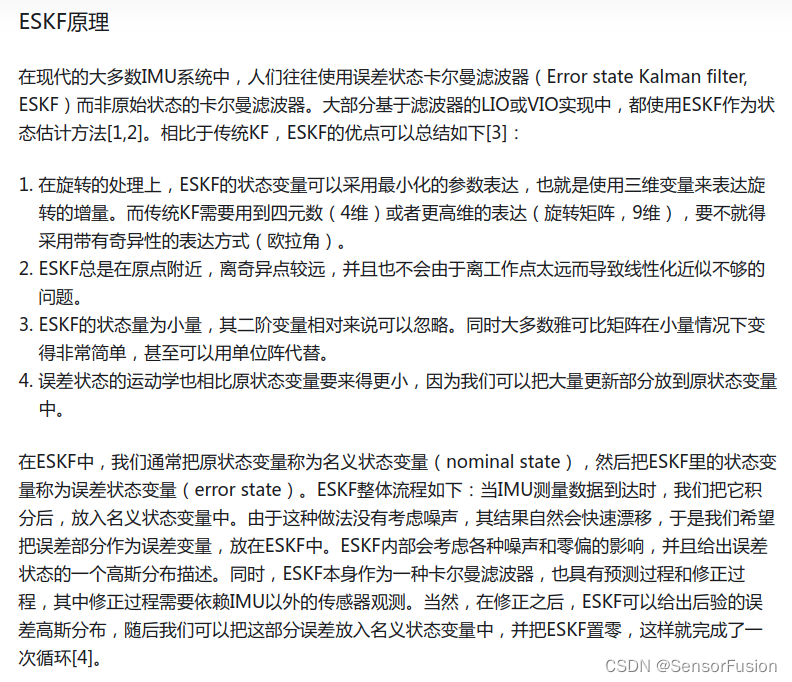
SO(3)流形上的ESKF
https://zhuanlan.zhihu.com/p/441182819


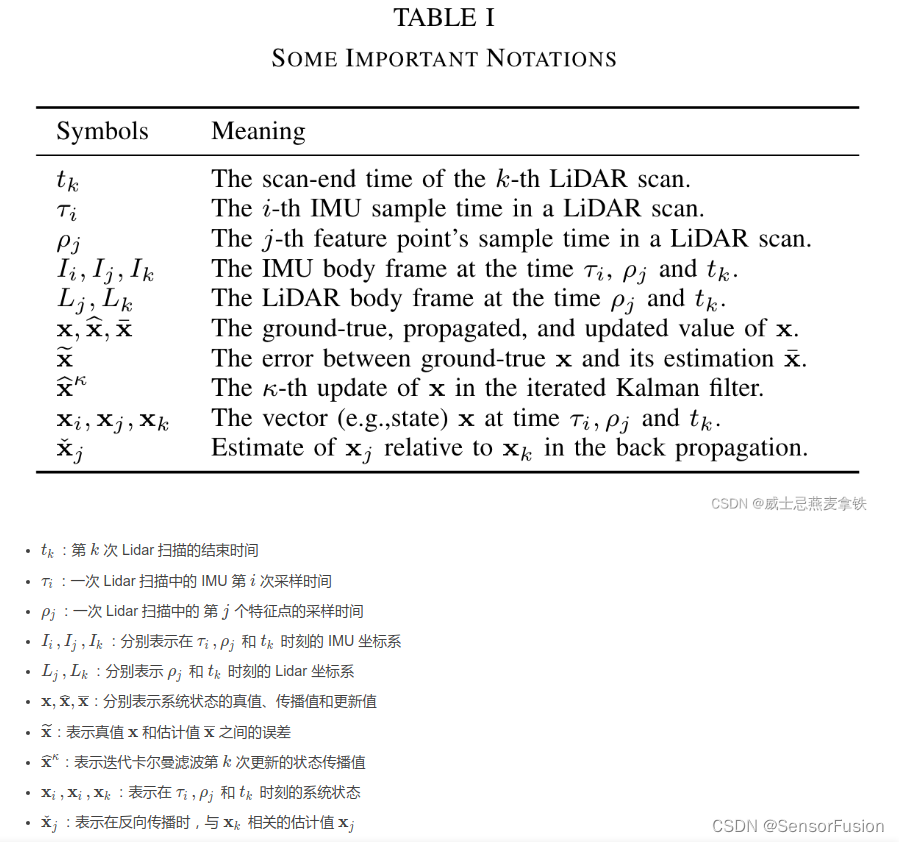
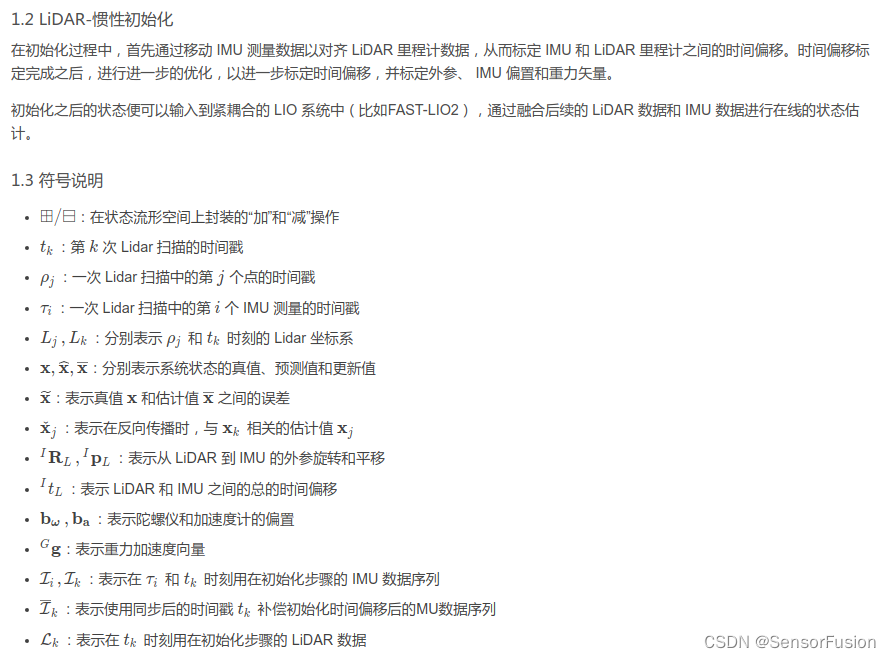
>>>LIO系统
https://blog.csdn.net/whatiscode/article/details/126371351?spm=1001.2014.3001.5501
可参考LI-init标定算法,借鉴了fast-lio2
https://blog.csdn.net/whatiscode/article/details/126252173?spm=1001.2014.3001.5501
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- python爬虫01-爬虫介绍
- 【坐标系在动态SLAM中究竟有多重要】
- 输电线路的“千里眼“?可视化图像在线监测装置技术解析!|深圳鼎信
- window安装DockerDesktop无法使用host网络模式解决方案
- 【华为 ICT & HCIA & eNSP 习题汇总】——题目集7
- 目标检测-Two Stage-Faster RCNN
- 一键转换,创新无限:将HTML轻松转化为PDF!
- 基于华为ENSP模拟器-vlan划分网络
- 【前端框架】Vue2合集
- 使用pycocotools打印更多数据(注意,修改后最好再还原!最好是一次性使用)