Open3D 与 Point Cloud 处理
点云基础
3D数据结构
-
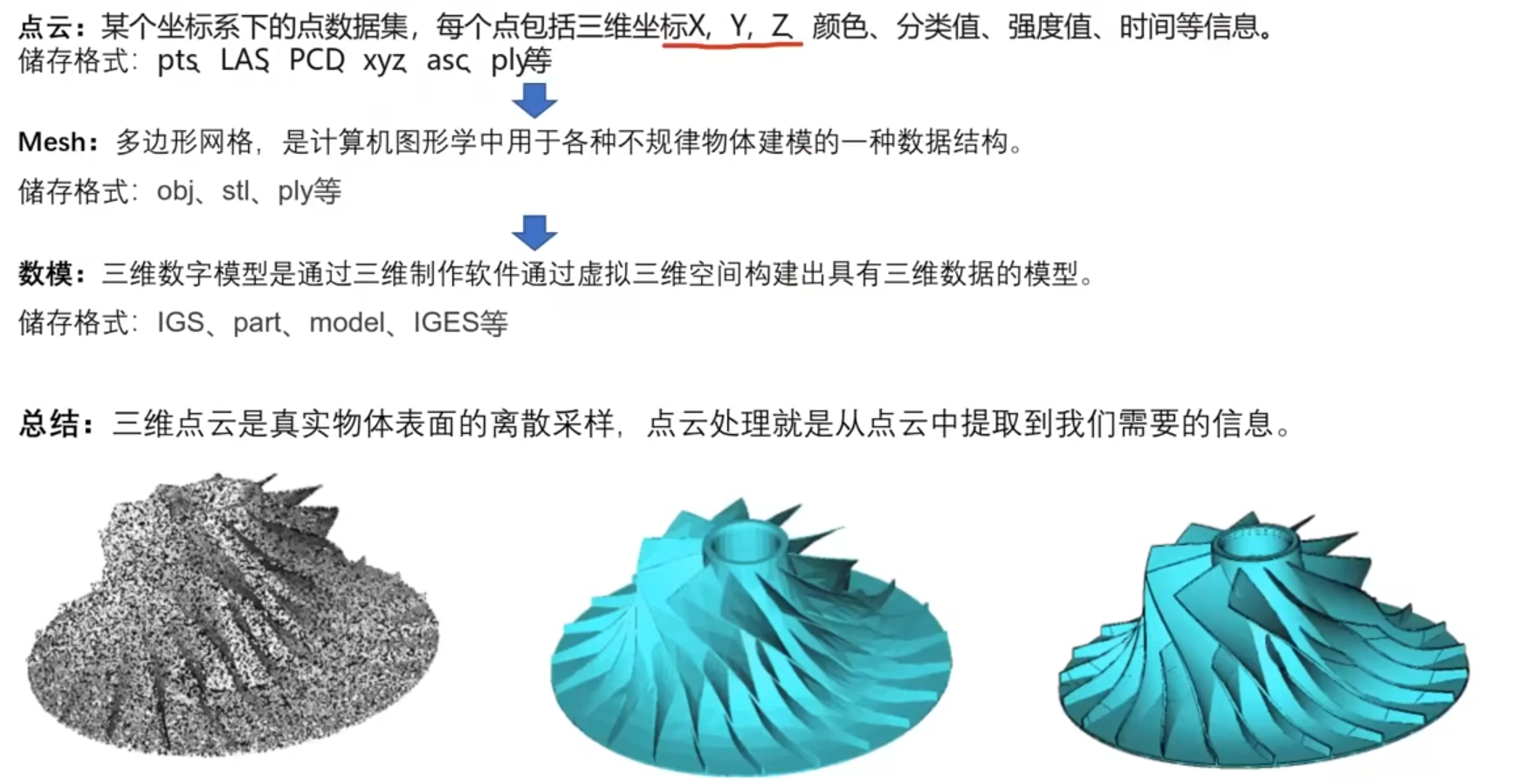
点云(Point Cloud): 点云是由一组离散的点构成的三维数据集合,每个点都包含了
坐标信息 (x, y, z)、颜色 (RGB)、类别 (cls)、强度值等。存储格式:点云数据可以以多种格式存储,包括文本文件(txt、pts)、二进制文件(las、pcd)和PLY格式(一种常见的三维数据格式)等。这些格式可以保存点的坐标和其他属性信息。 -
Mesh(网格):网格是由一组连接的三角形或四边形构成的表面模型,用于表示物体的外形。它由
顶点、面和边组成,其中顶点描述了空间中的位置,面描述了网格的表面形状,边连接顶点和面。存储格式:常见的网格存储格式包括OBJ、STL和PLY等。OBJ格式是一种文本格式,可以保存网格的顶点坐标、法线、纹理坐标和面的连接关系。STL格式是一种二进制格式,主要保存网格的三角面片信息。PLY格式可以保存顶点属性、法线和面的连接关系。 -
数学模型:数学模型是使用数学公式和方程描述的几何形状或曲线。它们通常由
参数化方程、隐式方程、其他几何描述生成。存储格式:数学模型可以使用多种格式存储,如IGS(Initial Graphics Exchange Specification)、PART(Part file)、IGES(Initial Graphics Exchange Specification)等。这些格式可以保存数学模型的几何参数和其他相关信息。
点云采集方法
-
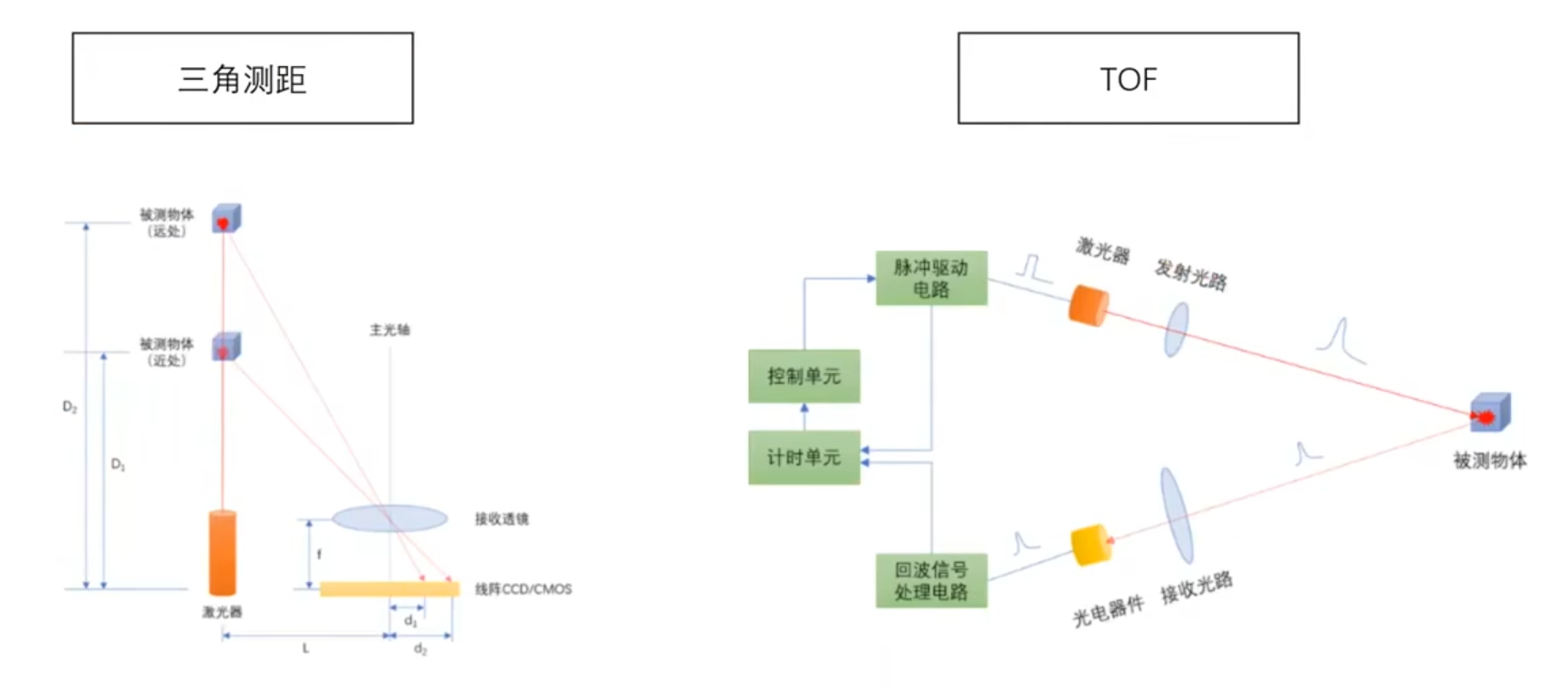
激光扫描仪原理(三角测距):
激光扫描仪使用三角测距原理来测量物体表面的距离。它发射一束激光光束,该光束会照射到物体表面上并被反射回来。激光扫描仪同时记录激光光束的发射位置和接收位置,以及接收到的激光信号的时间或强度。利用发射和接收位置之间的已知距离以及激光信号的往返时间(或强度)可以使用三角测距原理计算出物体表面与激光扫描仪之间的距离。通过在不同的位置和角度上进行多次测量,可以获得物体表面的多个点的距离信息,从而构建出三维点云模型。
-
深度相机原理(TOF,Time of Flight):
深度相机使用了TOF(Time of Flight)技术来获取物体表面的深度信息。TOF技术基于发送和接收光信号的往返时间来计算物体表面的距离。深度相机通过发射一束调制的光信号(通常是红外光)并测量其返回时间来计算物体表面的距离。发送的光信号经过物体后被反射回相机,相机接收到反射的光信号后测量出其返回时间。根据光在真空中的传播速度,可以计算得出光信号从相机发射到物体表面并返回的时间。通过将时间与光速结合使用,可以计算出物体表面与深度相机之间的距离。
深度相机同时测量多个像素点的距离,从而生成物体表面的深度图像。
-
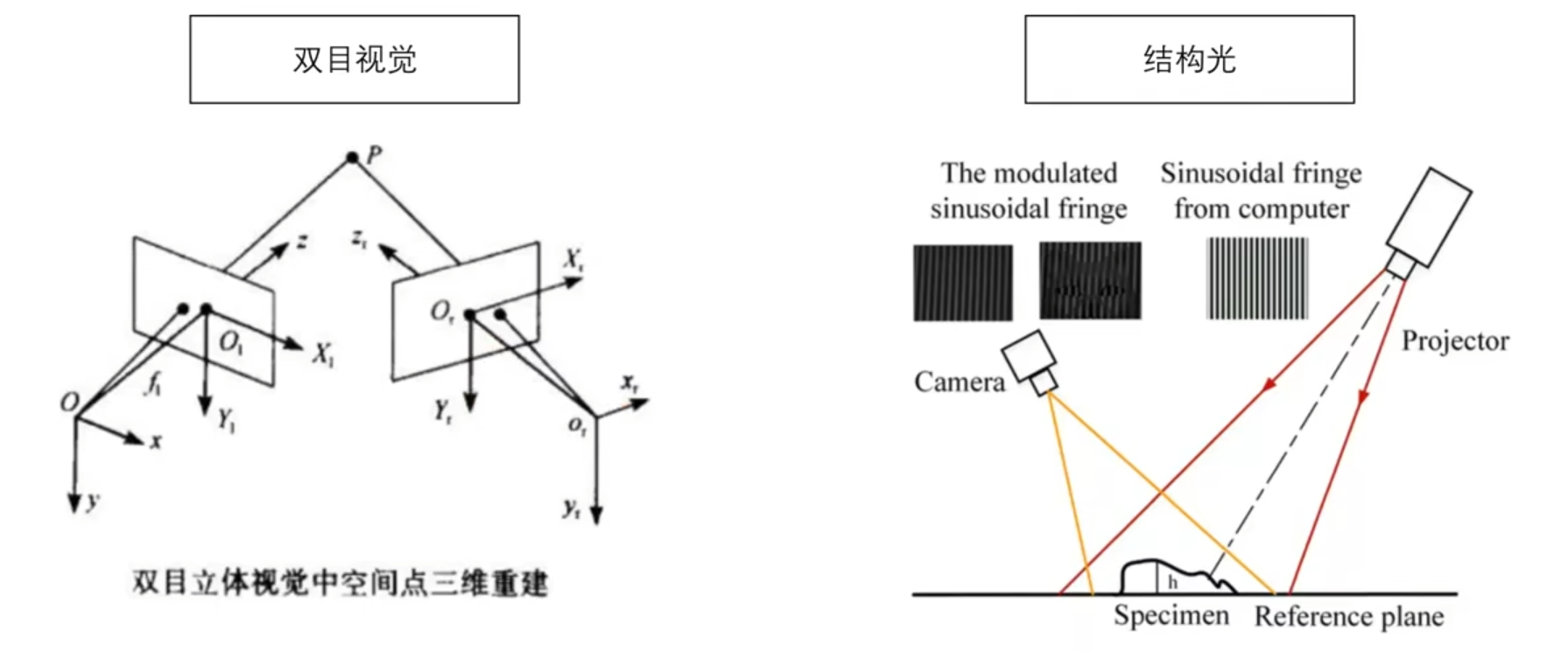
双目相机原理(双目视觉):
双目相机由两个镜头组成,分别称为左眼和右眼。这种相机模拟了人类的双眼视觉系统,通过分析左右两个图像之间的差异来计算物体的深度。左右两个镜头之间的距离称为基线,并且两个镜头具有略微不同的观察角度。当光线从物体表面入射到左右两个镜头时,它们会在图像上形成略微不同的投影。通过对左右两个图像进行匹配,比较不同像素点之间的位移或差异,可以计算出物体表面的深度。
双目相机通过分析左右两个图像之间的视差来计算深度,视差越大,物体距离相机越近。
-
光学多视角重建SFM原理:
光学多视角重建SFM(Structure from Motion)利用多个相机或图像来重建物体的三维形状。SFM基于两个主要原理:三角测量和运动估计。在SFM中,多个相机或图像被用于捕捉物体的不同视角。通过在这些视角下对图像进行特征匹配,可以确定相机之间的对应关系,从而得到视差信息。利用这些视差信息以及相机的内外参数,可以使用三角测量原理计算得到物体表面上点的三维坐标。
此外,SFM还利用了相机的运动信息。通过观察相机在不同视角下的位置和方向的变化,可以估计相机的运动轨迹。结合相机的运动轨迹和特征匹配得到的三维点云信息,可以进一步优化三维重建结果。
-
结构光原理:
结构光是一种利用光投影和摄影技术来捕捉物体表面形状的方法。它使用一台投影仪将具有特定编码的光图案投射到物体表面上,并使用一台相机来捕捉投影后的图案。投影仪会发射一个具有特殊编码的光图案,如条纹或格点图案。这些光图案在物体表面上产生投影,并被相机捕捉。物体表面形状的变化会导致投影图案的失真。

点云处理框架
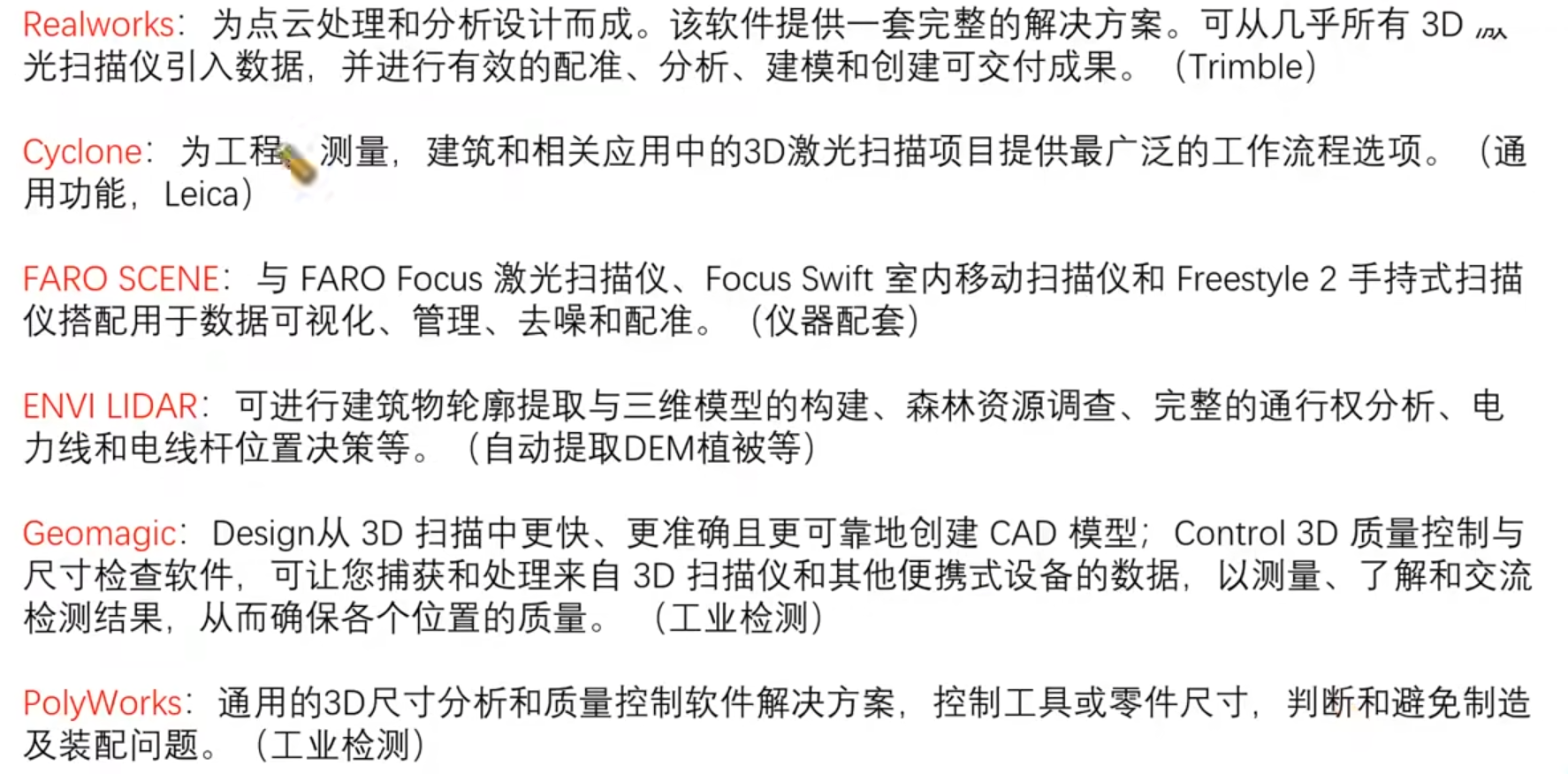
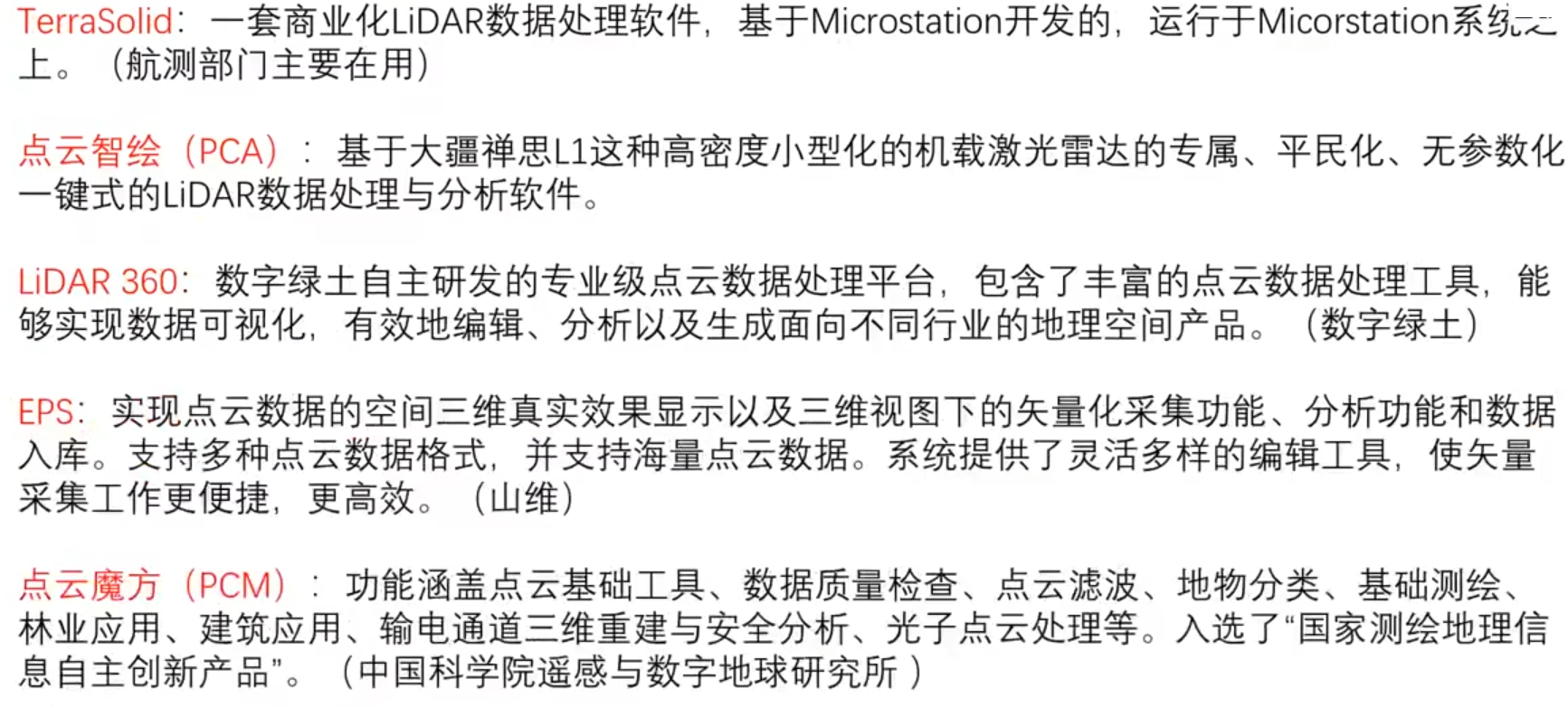
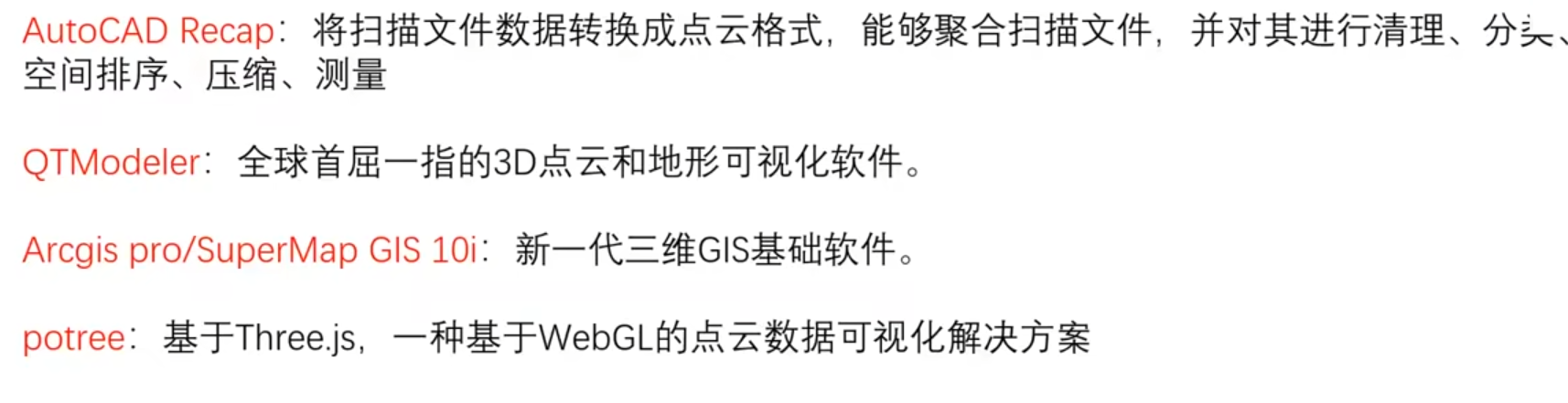
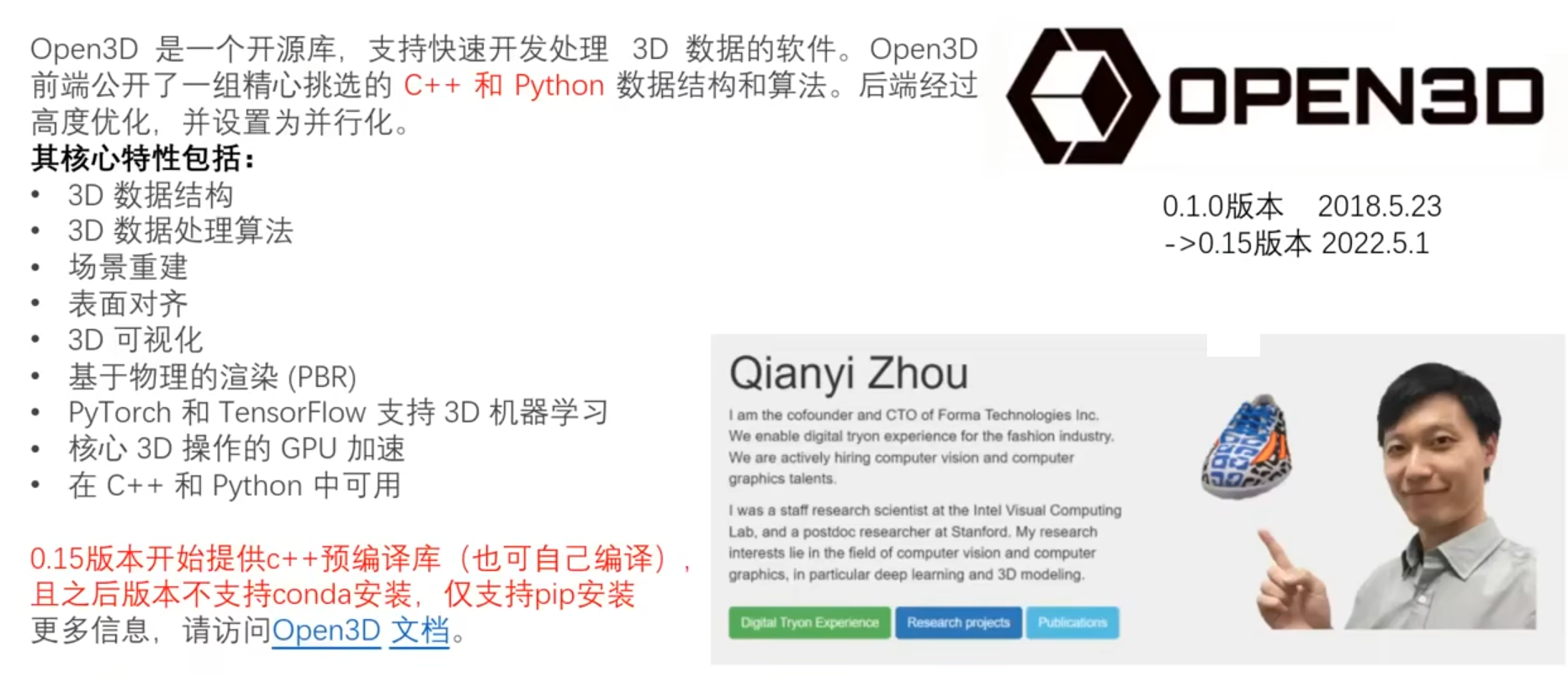
商用框架:
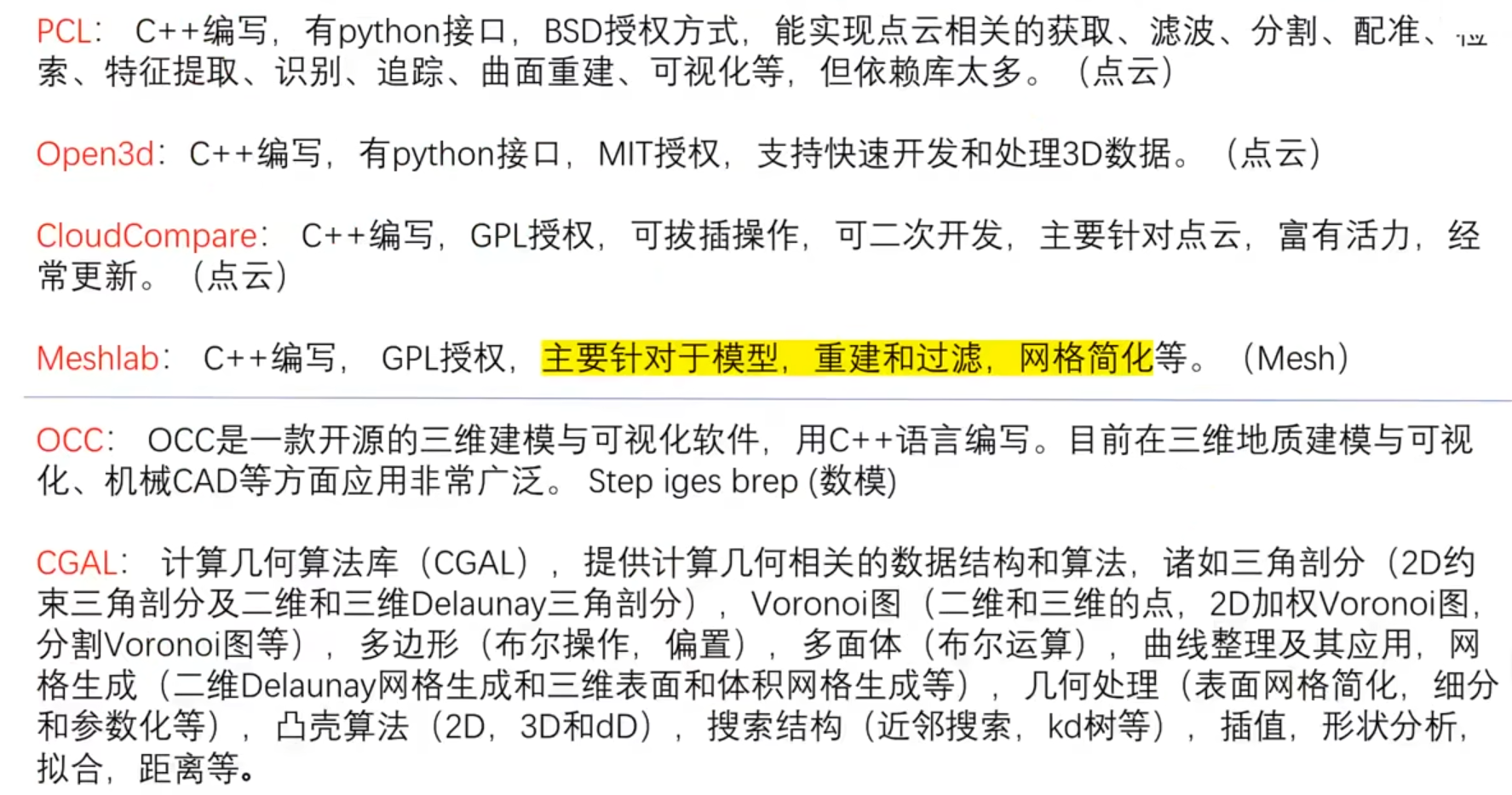
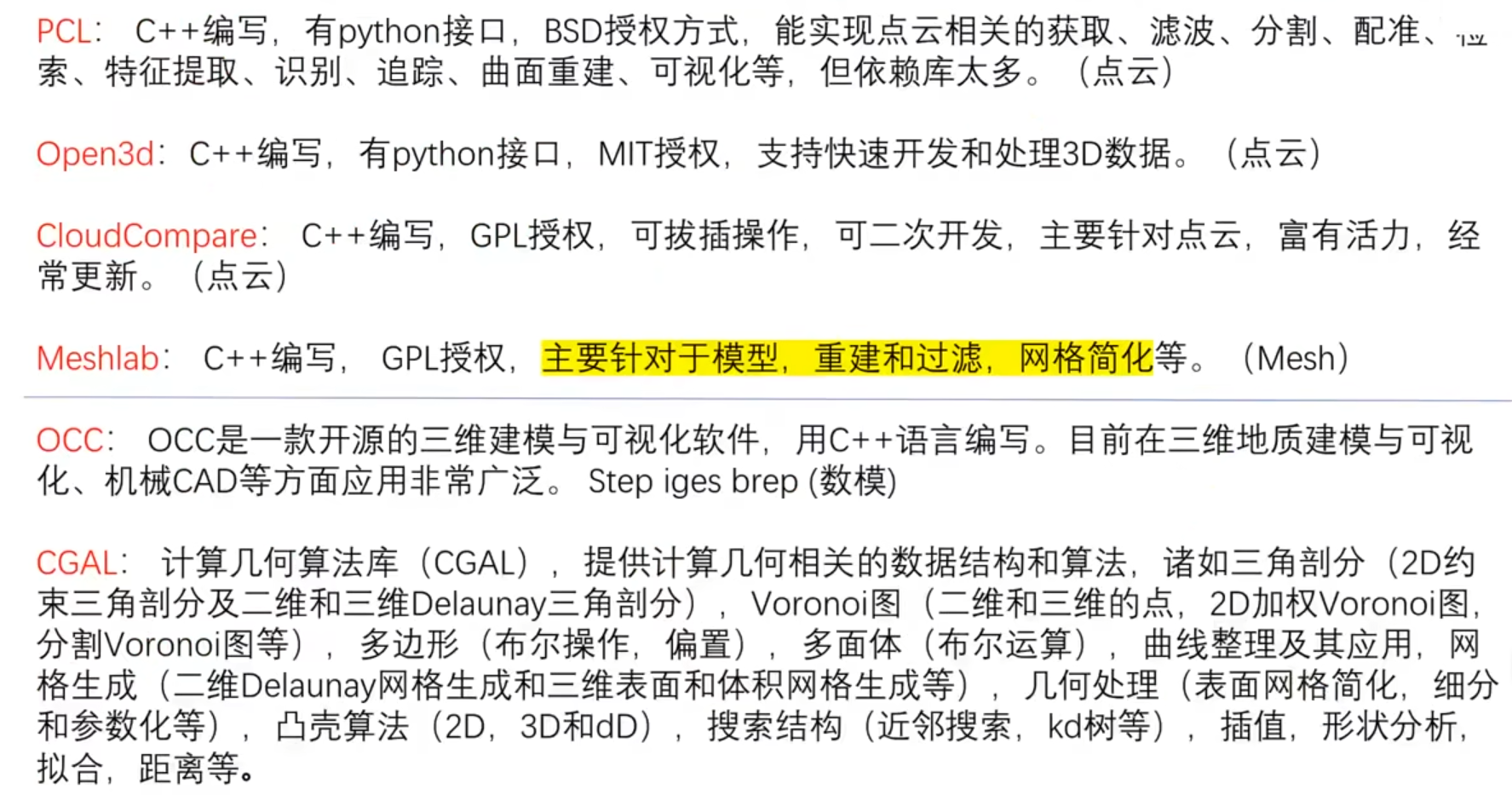
开源框架:
点云操作
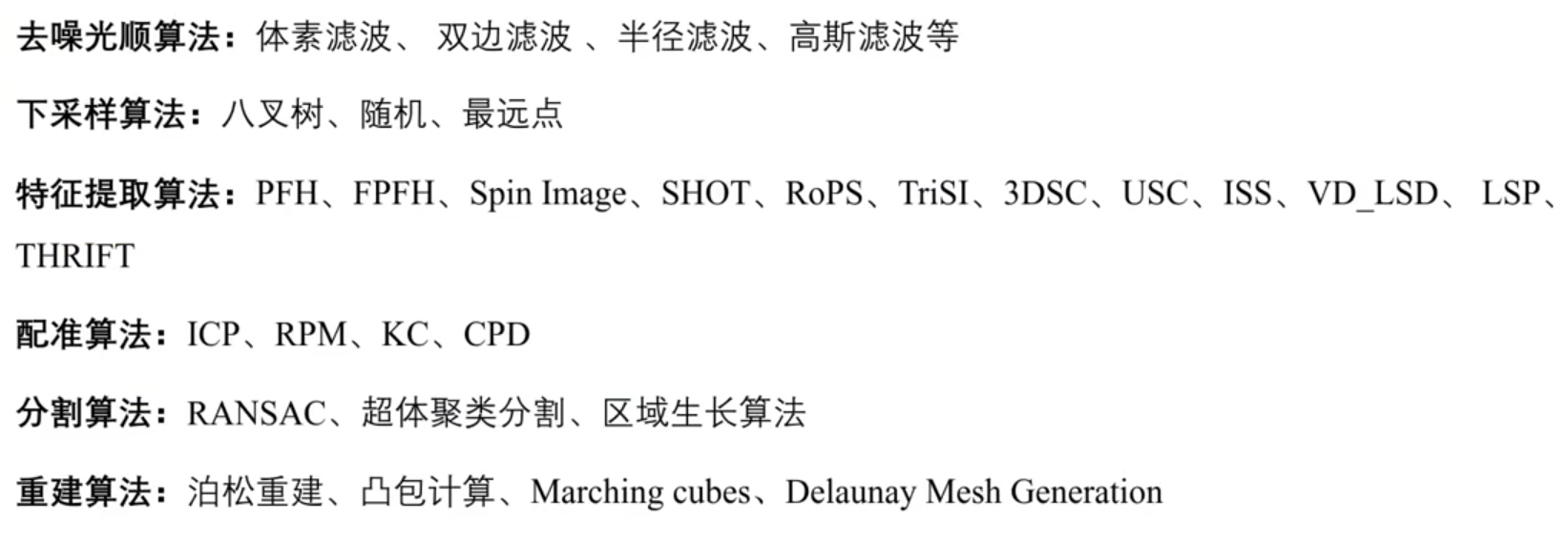
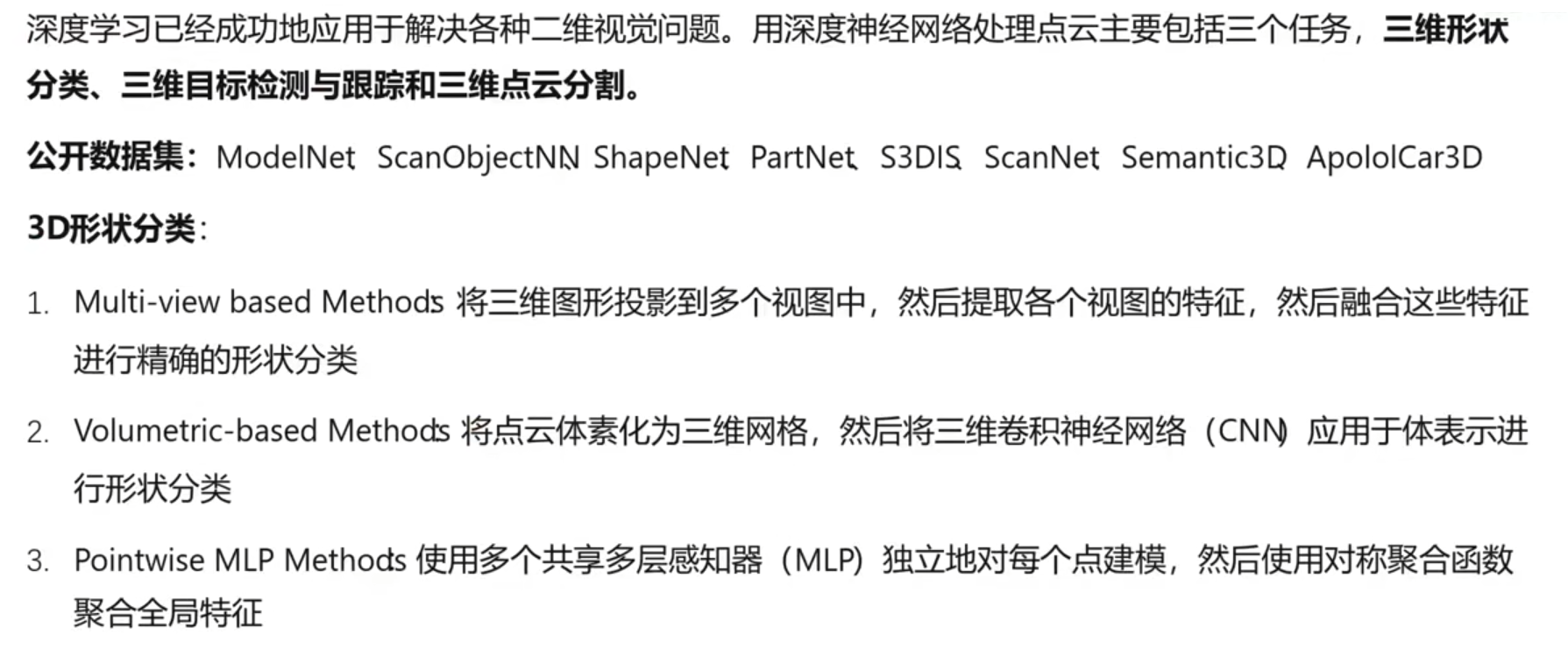
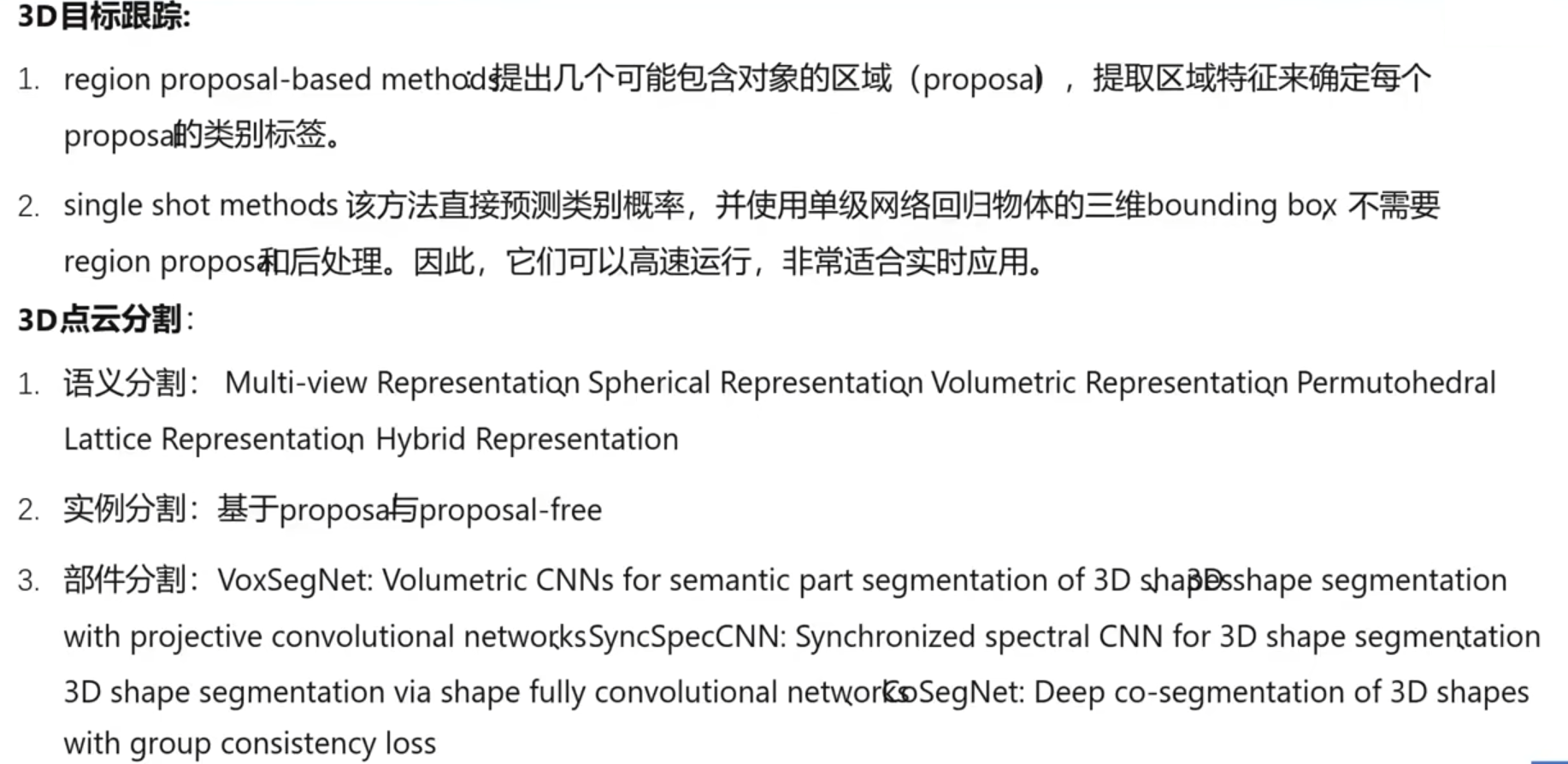
Open3D基础操作

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023年全国职业院校技能大赛网络系统管理网络模块 地址规划表
- 基于SSM架构的超市管理系统设计
- 大模型系列:OpenAI使用技巧_使用文本向量做交易数据的多分类模型
- 衡兰芷若成绝响,人间不见周海媚(4k修复基于PaddleGan)
- 软测思考题:自动化测试重运行是好是坏?
- 代理设计模式
- Spring事务传播行为 详解
- 【数据结构—堆排序、top k问题和时间复杂度】
- git 杂项
- nodejs学习计划--(一)初始nodejs