EDA实验-----直流电机驱动设计(Quartus II )
目录
一、实验目的
- 了解直流电机控制的工作原理和实现的方法。
- 掌握PWM波控制直流电机转速的方法。
- 学会用于Verilog语言设计直流电机控制电路。
二、实验仪器设备
- PC机一台
- FPGA实验开发系统一套。
三、实验的重点和难点
- 重点:掌握直流电机调速控制原理。
- 难点:应用Verilog语言实现直流电机控制电路设计。
四、实验原理
本次实验使用的电机驱动电路如下图所示:
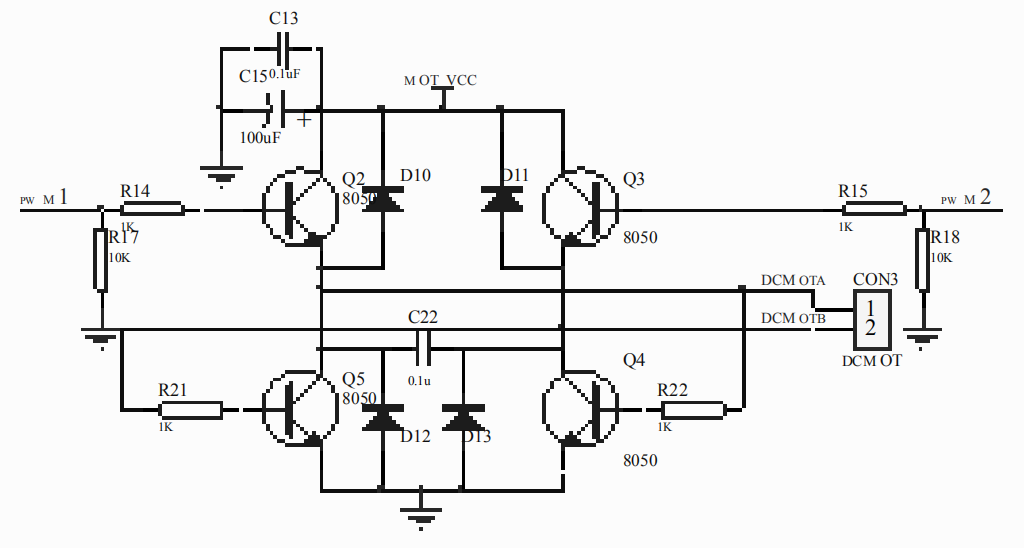
????????????????????????????????????????????????图1 直流电机H桥驱动电路?
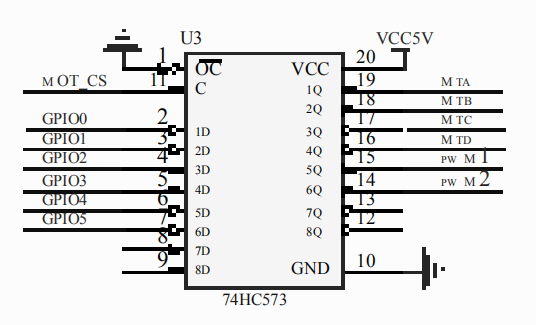
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??图2 锁存器
- 调方向
如图1所示,当PWM1为高电平时,PWM2为低电平时,Q2和Q4导通,Q3和Q5不导通。当PWM1为低电平时,PWM2为高电平时,Q2和Q4不导通,Q3和Q5导通。两种情况电机转动的方向不一样。
?????2. 调速度
电机的速度是通过PWM调节,所谓PWM就是脉宽调制器,通过调制器给电机提供一个具有一定频率的脉冲宽度可调的脉冲电。脉冲宽度越大即占空比越大,提供给电机的平均电压越大,电机转速就高。反之脉冲宽度越小,则占空比越越小。提供给电机的平均电压越小,电机转速就低。
五、实验步骤
- 启动 Quartus II 建立一个空白工程,选择的器件为 Altera 公司的 Cyclone 系列的 EP2C8Q240C8 芯片,命名为 moto.qpf;
- 新建一个 Schematic File 文件,命名为 moto.bdf;
- 分别新建 3 个 Verilog HDL File 文件,分别命名为 divclk.v,pwm_logic.v, moto_test.v。输入程序代码并保存(对应源程序 11),然后进行综合编译。若在编译过程中发现错误,则找出错误并更正错误,直至编译成功为止。从设计文件创建模块(FileàCreat UpdateàCreat Symbol Files for Current File), divclk.v生成名为 divclk.bsf;pwm_logic.v 生成名为 pwm_logic.bsf;moto_test.v 生成 moto_test.bsf;
- 在 moto.bdf 文件中,在空白处双击鼠标左键,在 Symbol 对话框左上角的 libraries 中,分别将Project 下的 divclk、moto_test、pwm_logic 模块放在图形文件 moto.bdf 中,加入输入、输出引脚,双击每个引脚,进行引脚命名,并锁定管脚,将未使用的引脚设置为三态输入(一定要设置,否则可能会损坏芯片);
| Clk1 | 209 |
| K1 | 153 |
| K2 | 95 |
| K3 | 154 |
| MOT_CS | 171 |
| Gpio[4] | 164 |
| Gpio[5] | 159 |
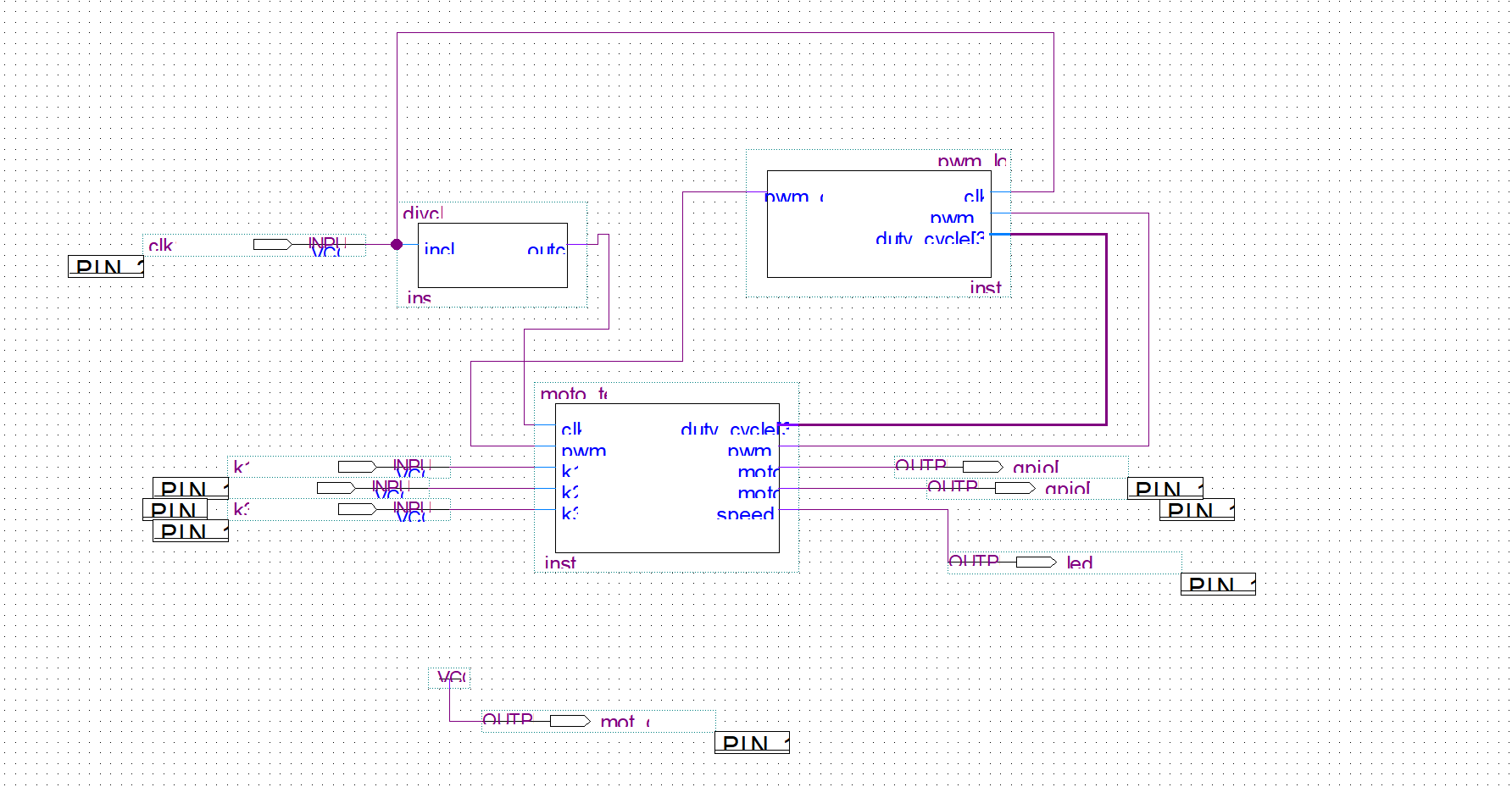
完整的顶层模块原理图如图所示:

其中 K1 控制电机的正转与反转;K2 控制电动机启动、停止;K3 控制占空比;
????????5. 将 moto.bdf 设置为顶层实体。对该工程文件进行全程编译处理,若在编译过程中出现错? ? ? ? ? ? ? ? 误,则找出错误并更正,直至编译通过为止;
????????6. 将 USB-Blaster 下载电缆的两端分别连接到 PC 机的 USB 接口和EDA 实验箱上的 JTAG? ? ? ? ? ? ? ? 下载口上,打开电源,执行下载命令,把程序下载到 FPGA 器件中,此时,即可在 EDA 实? ? ? ? ?验箱上控制直流电机。
六、实验报告
- 总结Verilog设计直流电机驱动的步骤。
- 讨论自己在设计过程中遇到的问题、解决的过程以及收获体会。
七、实验过程
基本流程为创建项目、创建Verilog文件、写代码、进行波形仿真、画出电路图、设置管脚和三态、烧录文件。前面的项目创建等等基本操作我就不去做演示了,下面主要去讲原理和代码。
1.分频器代码
这个模块是对输入信号的频率去进行分频处理,分出的频率是满足电动机所需的频率即可。代码如下,很显然,这个是一个8分频的分频器,这里我们直接拿过来用就行了。
module divclk(inclk,outclk);
input inclk;
output outclk;
reg outclk;
reg [2:0] cnt;
initial
begin
cnt<=0;
outclk<=0;
end
always @(posedge inclk)
begin
cnt<=cnt+1;
if (cnt<=0)
outclk<=outclk+1;
end
endmodule 2.方向选择器
下面代码是用于设计直流电动机转向选择的代码,供大家参考一下。
module pwm_logic(clk,pwm_en,duty_cycle,pwm_out);
input clk;
input [3:0] duty_cycle;
input pwm_en;
output pwm_out;
reg pwm_out;
reg [15:0] counter;
always @(posedge clk)
begin
if(pwm_en)
counter <= counter + 1'b1;
end
always @(posedge clk)
begin
if (pwm_en & (counter[15:12] <= duty_cycle))
pwm_out <= 1'b1;
else
pwm_out <= 1'b0;
end
Endmodule3.直流电动机工作原理
直流电动机可以通过不同的按键来去设置其转向、转速等等内容,这里我主要去讲如何去控制转速问题。
对于电动机转速的理解,我们可以理解成日常生活当中的骑电动车,我们骑电动车的时候并不是一直在加油的,而是加油一定时间之后就让电动车自己利益惯性滑行,然后慢下来再去加油。同样的,直流电动机也是通过这样的方式去调档,输入高电平表示通电(也就是加油),低电平就不通电(此时惯性滑行),如果在一个周期内,高电平占比为99.9%的话我们就表示为最高档,如果占比66.6%我们就表示第二档,占比33.3%就最低档,那剩下的时间就是惯性转动。
这部分就是核心代码了,其中输入包括分频输出的信号,以及按键的三个输入(包括转向控制,转速设置和启动开关)。
module moto_test(clk, pwm_in, k1, k2, k3, duty_cycle, pwm_en, motoa, motob, speed_led);
input k1, k2, k3, clk, pwm_in;
output reg pwm_en, motoa, motob;
output reg [3:0] duty_cycle;
reg moto_dir;
reg [2:0] dout1, dout2, dout3, buff, key_edge;
output reg speed_led; // 新增的输出端口
//新增部分:速度计算和速度LED显示
reg [15:0] speed_counter; // 用于计算速度的计数器,可以根据需要调整位宽
reg speed_flag; // 当速度计数器达到设定值时,此标志位置1
initial begin
duty_cycle = 4;
speed_counter = 0;
speed_flag = 0;
end
// 在每个时钟上升沿,如果电机正在运行(pwm_en为高),则增加速度计数器
always @(posedge clk) begin
if (pwm_en) begin
if (k1 || k2 || k3) begin // 如果按键被按下,增加计数器的速度
speed_counter <= speed_counter + 1;
end else begin // 否则,计数器的速度降低
speed_counter <= speed_counter - 1;
end
end
end
// 当速度计数器达到设定值时(例如,对应于每秒的转速),将速度LED设置为高电平,否则为低电平
always @(posedge clk) begin
if (speed_flag) begin
speed_led <= 2; // 如果速度标志已经设置,那么点亮LED灯
end else if (pwm_en) begin
speed_led <= 1'b0; // 如果速度标志没有设置,且电机正在运行,那么熄灭LED灯
end
end
// 当速度计数器达到设定值时,设置速度标志,并在下一个时钟周期将其清除
always @(posedge clk) begin
if (speed_counter == 10000) begin // 例如,这里设定为每10000个时钟周期为1秒(可以根据需要调整)
speed_flag <= 1'b1;
end else begin
speed_flag <= 1'b0;
end
end
//按键消抖部分
always @(posedge clk)
begin
begin
dout1 <= {k1,k2,k3};
dout2 <= dout1;
dout3 <= dout2;
end
end
//按键边沿检测部分
always @(posedge clk)
begin
buff <= dout1 | dout2 | dout3;
key_edge = ~(dout1 | dout2 | dout3) & buff;
if(key_edge[0]) //按键1;K3,控制占空比
begin
duty_cycle <= duty_cycle + 1'b1;
if(duty_cycle==8)
duty_cycle<=1;
end
if(key_edge[1]) //按键2;K2,控制电动机启动、停止
pwm_en <= ~pwm_en;
if(key_edge[2]) //按键3;K1,控制电机正转与反转
moto_dir <= ~moto_dir;
motoa = moto_dir ? pwm_in : 1'b0;
motob = moto_dir ? 1'b0 : pwm_in;
end
endmodule4.电路连接图
写好了Verilog代码,就进行分析错误,分析无误后,我们就对这些代码生成子模块文件。然后就创建block文件开始连接电路图,电路图以及管脚配置如下:
5.文件烧录
弄好了之后就是最后一步操作了,把没用到的管脚设置三态,然后烧录文件。
点击Assignment, Device
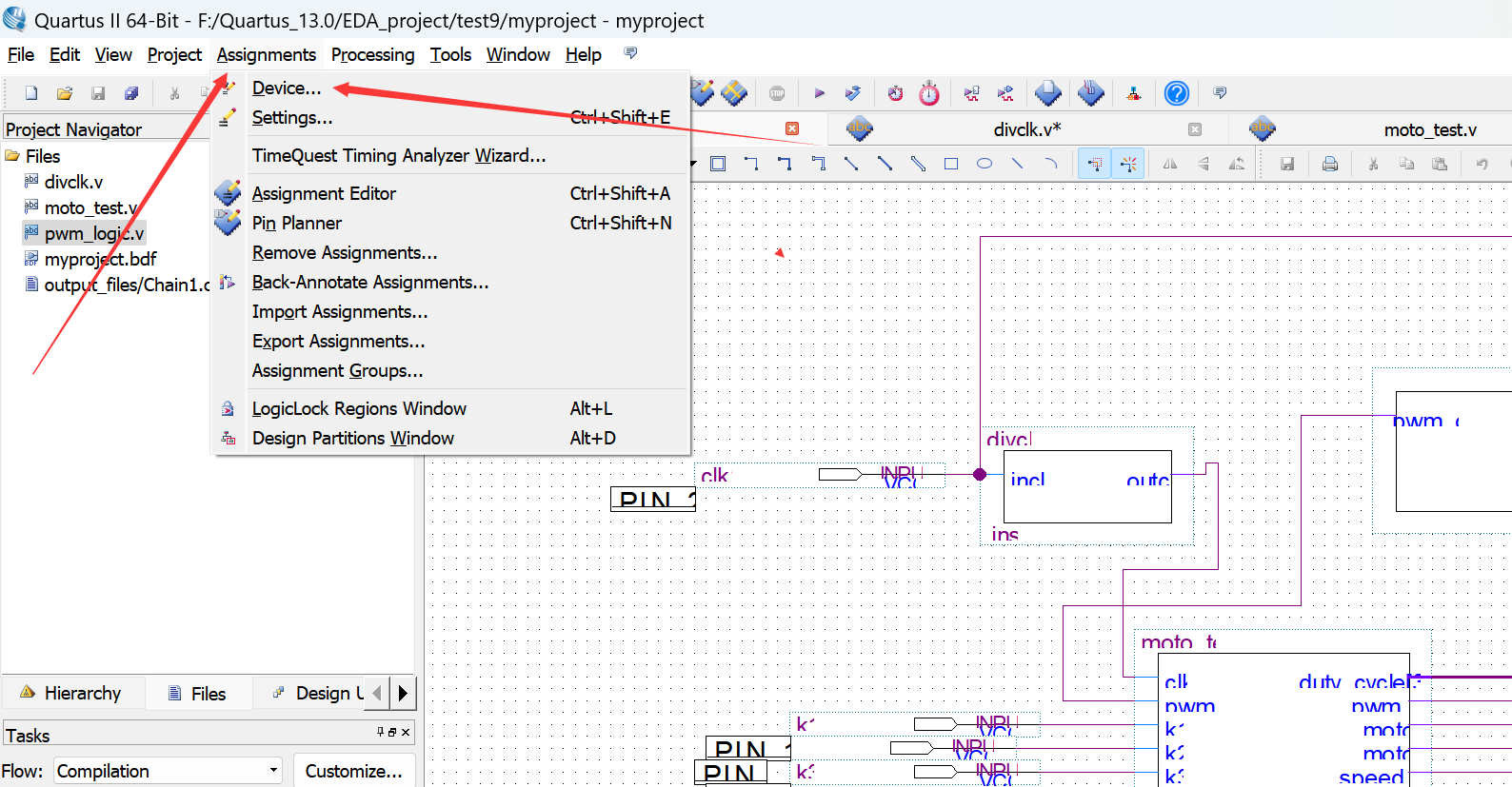
然后点击这里,设置管脚状态。??

选择第一个就行了,就是把多余的管脚设置三态。
最后点击此处进行烧录。?

??这里我们会看到,下面有一个芯片,这个也就是我们写好了的sof文件,然后就是通过你的电脑接口去连接到开发板,如果你看到上面有一个No Hardware的时候,你点击旁边的按钮进行接口设置,设置为USB接口即可(USB线连接了你的开发板就会自动显示出来的)。最后点击start就可以进行烧录了。?
以上就是本期的全部内容了,我们下次见!
分享一张壁纸:

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!