单片机7-10
发布时间:2024年01月23日
目录
定时器









为什么12MHz的工作周期为一微秒:
12NHz时钟频率下,12MHz = 12,000KHz = 12,000,000Hz,一个时钟振荡周期就是1/12000000秒,亦即1/12微秒,标准MCS51系列单片机的一个机器周期是12个时钟振荡周期,也就是12 * (1/12) = 1微秒;
6MHz时钟频率下,6MHz = 6,000KHz = 6,000,000Hz,一个时钟振荡周期就是1/6000000秒,亦即1/6微秒,标准MCS51系列单片机的一个机器周期是12个时钟振荡周期,也就是12 * (1/6) = 2微秒。
初始化定时器(手写)
void Timer0_Init(){
//TMOD = 0x01;//选择工作模式1,可能会修改到高位所设定的值;给寄存器赋值需要使用十六位
TMOD &= 0xF0;//把TMOD的低四位进行清零,高四位保持不变
TMOD |= 0x01;//把TMOD的最低位设置为1,高四位保持不变
TF0 = 0;//中断溢出标志
TR0 = 1;//T0的运行控制位,使其开始工作
TH0 = 64535 / 256;//高位 为什么是256:一个八位寄存器最大显示255(1111 1111)
TL0 = 64535 % 256 + 1;//低位 再多就需要其他寄存器存储,这样就能分成高位与低位
//此时开始计时,到溢出时刚好1ms(1000us);
ET0 = 1;//中断是否被允许
EA = 1;//所有中断是否被允许
PT0 = 0;//中断优先级
}生成(注意加上中断相关参数)
void Timer0Init(void) //1微秒@12.000MHz
{
//AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}按键控制LED流水灯关键代码
key.c文件
#include <REGX52.H>
#include "Delay.h"
/**
* @brief 获取独立按键键码
* @param 无
* @retval 按下按键的键码,范围 0~4,无按键按下时,返回值为0
*/
unsigned char Key(){
unsigned char KeyNum = 0;
if(P3_1 == 0){ Delay(20); while(P3_1 == 0) Delay(20); KeyNum = 1;}
if(P3_0 == 0){ Delay(20); while(P3_0 == 0) Delay(20); KeyNum = 2;}
if(P3_2 == 0){ Delay(20); while(P3_2 == 0) Delay(20); KeyNum = 3;}
if(P3_3 == 0){ Delay(20); while(P3_3 == 0) Delay(20); KeyNum = 4;}
return KeyNum;
}Timer0.c文件
#include <REGX52.H>
/**
* @brief 定时器0初始化,1微秒@12.000MHz
* @param 无
* @retval 无
*/
void Timer0Init(void) //1微秒@12.000MHz
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
PT0 = 0;
}
/* 定时器中断函数模板,中断后要做的事
void Timer0_Routine() interrupt 1{
static unsigned int T0Count;
T0Count ++;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
if( T0Count >= 1000 ){
T0Count = 0;
P2_0 = ~P2_0;
}
}
*/main.c文件
#include <REGX52.H>
#include "Timer0.h"
#include "Key.h"
#include "INTRINS.h"
unsigned char KeyNum,LEDMode;
void main(){
P2 = 0xFE;//点亮最低位
Timer0Init();//初始化定时器
while( 1 ){
KeyNum = Key();//获取所按按键
if(KeyNum){
if(KeyNum == 1 ){
LEDMode ++;
if(LEDMode >= 2) LEDMode = 0;
}
}
}
}
void Timer0_Routine() interrupt 1{
static unsigned int T0Count;
T0Count ++;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
if( T0Count >= 500 ){500ms进行一次操作
T0Count = 0;
if(LEDMode == 0)
P2 = _crol_(P2,1);//左移 越界后会将移出值放到最末位
if(LEDMode == 1)
P2 = _cror_(P2,1);//右移
}
}
定时器时钟关键代码
main.c
#include <REGX52.H>
#include "Timer0.h"
#include "Delay.h"
#include "LCD1602.h"
unsigned char Sec,Min,Hour;
void main(){
LCD_Init();
Timer0Init();
LCD_ShowString(1,1,"Clock");
LCD_ShowString(2,3,":");
LCD_ShowString(2,6,":");
while( 1 ){
LCD_ShowNum(2,1,Hour,2);
LCD_ShowNum(2,4,Min,2);
LCD_ShowNum(2,7,Sec,2);
}
}
void Timer0_Routine() interrupt 1{
static unsigned int T0Count;
T0Count ++;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
if( T0Count >= 1000 ){//每一秒进行操作
T0Count = 0;
Sec ++;
if(Sec >= 60){
Sec = 0;
Min ++;
if(Min >= 60){
Min = 0;
Hour ++;
if(Hour >= 24){
Hour = 0;
}
}
}
}
}串口通信











注意:使用生成代码工具时,记得查看表单是否所有选项均正确,记得点击生成C代码,而不是直接复制粘贴

波特率计算
找到起始值TH1 = 0xF4? ? ? ? 用256减去起始值TH1得12us溢出一次? ? ? ? 获得溢出率为1/12MHz
再看是否设置翻倍,(如果有则先/2)没有则直接 /16即得到波特率当前单位为MHz


串口向电脑发送数据
UART.c
#include <REGX52.H>
/**
* @brief 串口初始化,4800bps@12.000MHz
* @param 无
* @retval 无
*/
void UART_Init(){
SCON = 0x40;//0100 0000配置SCON寄存器
PCON |= 0x80; //使能波特率倍速位SMOD,将最高位置一,使得波特率加倍
//初始化定时器0
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x20; //设置定时器1模式,配置为模式2,八位自动重装
TL1 = 0xF3; //设定定时初值
TH1 = 0xF3; //设定定时器重装值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //定时器1开始计时
}
/**
* @brief 串口发送一个字节数据
* @param Byte 要发送的一个字节
* @retval 无
*/
void UART_SendByte(unsigned char Byte){
SBUF = Byte;//写入SBUF
while(TI == 0);//数据发送未完成,TI为0,数据发送完成时,TI才会置1
TI = 0;//数据发送完成后,将TI 的值重新赋值为0(未赋值前TI应为0)
}
main.c
#include <REGX52.H>
#include "Delay.h"
#include "UART.h"
unsigned char Sec;
void main(){
UART_Init();
while( 1 ){
UART_SendByte(Sec);
Sec++;
Delay(1000);
}
}电脑通过串口控制LED
这里改了TL1以及TL2才成功,我买的单片机晶振频率为11.0592,大伙注意一下,修改一下生成的需求列表。
UART.c
#include <REGX52.H>
/**
* @brief 串口初始化,4800bps@12.000MHz
* @param 无
* @retval 无
*/
void UART_Init(){
SCON = 0x50;//0101 0000配置SCON寄存器,并设置为可接收
PCON |= 0x80; //使能波特率倍速位SMOD,将最高位置一,使得波特率加倍
//初始化定时器1
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x20; //设置定时器1模式,配置为模式2,八位自动重装
TL1 = 0xF4; //设定定时初值
TH1 = 0xF4; //设定定时器重装值,
ET1 = 0; //禁止定时器1中断
TR1 = 1; //定时器1开始计时
//中断配置
EA = 1; //CPU开放中断
ES = 1; //允许串行口中断
}
/**
* @brief 串口发送一个字节数据
* @param Byte 要发送的一个字节
* @retval 无
*/
void UART_SendByte(unsigned char Byte){
SBUF = Byte;//写入SBUF
while(TI == 0);
TI = 0;
}
/**
* @brief 串口中断函数模板
* @param 无
* @retval 无
*/
//中断服务函数
void UART_Routine() interrupt 4{
if(RI == 1){//为真则说明SBUF中有数据
RI = 0;
}
}
main.c
#include <REGX52.H>
#include "Delay.h"
#include "UART.h"
void main(){
UART_Init();
while( 1 ){
}
}
//中断服务函数
void UART_Routine() interrupt 4{
if(RI == 1){//为真则说明SBUF中有数据
P2 = ~SBUF;//低电平才会亮 ,将SBUF中的值读出
UART_SendByte(SBUF);
Delay(1);
RI = 0;
}
}LED点阵屏
点阵上方的跳线帽放左边两个。






? LED点阵屏显示图形
main.c
#include <REGX52.H>
#include "Delay.h"
sbit RCK = P3^5; //特殊位声明,RCLK,上升沿锁存,P3的第五位等同P3_5
sbit SCK = P3^6; //特殊位声明,串行时钟,SERCLK,上升沿移位
sbit SER = P3^4; //特殊位声明,输入,SER
#define MATRIX_LED_PORT P0
/**
* @brief 74HC595写入一个字节
* @param Byte 要写入的字节
* @retval 无
*/
void _74HC595_WriteByte(unsigned char Byte){
unsigned char i;
for( i = 0; i < 8; i++){
SER = Byte & 0x80 >> i;//将一位(从最高位到最低位)值取出赋值给SER
SCK = 1;//进行移位
SCK = 0;//重置
}
//P2 = Byte;//这里点亮LED进行测试0xf0,最高位控制D8,高位8~5为1故灭,低位4~1为0亮
RCK = 1;//输出
RCK = 0;//重置
}
/**
* @brief LED点阵屏显示一列数据
* @param Column 列号,范围:0~7,0在最左侧
* @param Data 选择列显示的数据,范围:0~0xFF,1为亮,0为灭
* @retval 无
*/
void MatrixLED_ShowColumn(unsigned char Column,Data){//操作列,
_74HC595_WriteByte(Data);//将设置亮的位置写入点阵中,
//1为点亮,这里是列写入数据,为阳极,故1才能点亮
MATRIX_LED_PORT = ~(0x80 >> Column);//选择列,0为选中,列为阴极,故0才能选中
Delay(1);//消影
MATRIX_LED_PORT = 0xFF;//位清零
}
void main(){
SCK = 0;//初始化,当这个值为高电平时,进行移位操作
RCK = 0;//初始化,当这个值为高电平时,进行输出操作
while( 1 ){
MatrixLED_ShowColumn(0,0x3C);//这里各位为1才亮
MatrixLED_ShowColumn(1,0x42);//这里各位为1才亮
MatrixLED_ShowColumn(2,0xA9);//这里各位为1才亮
MatrixLED_ShowColumn(3,0x85);//这里各位为1才亮
MatrixLED_ShowColumn(4,0x85);//这里各位为1才亮
MatrixLED_ShowColumn(5,0xA9);//这里各位为1才亮
MatrixLED_ShowColumn(6,0x42);//这里各位为1才亮
MatrixLED_ShowColumn(7,0x3C);//这里各位为1才亮
}
}
LED点阵屏显示动画
MatrixLED.c
#include <REGX52.H>
#include "Delay.h"
sbit RCK = P3^5; //特殊位声明,RCLK,上升沿锁存,P3的第五位等同P3_5
sbit SCK = P3^6; //特殊位声明,串行时钟,SERCLK,上升沿移位
sbit SER = P3^4; //特殊位声明,输入,SER
#define MATRIX_LED_PORT P0
/**
* @brief 74HC595写入一个字节
* @param Byte 要写入的字节
* @retval 无
*/
void _74HC595_WriteByte(unsigned char Byte){
unsigned char i;
for( i = 0; i < 8; i++){
SER = Byte & 0x80 >> i;//将一位(从最高位到最低位)值取出赋值给SER
SCK = 1;//进行移位
SCK = 0;//重置
}
//P2 = Byte;//这里点亮LED进行测试0xf0,最高位控制D8,高位8~5为1故灭,低位4~1为0亮
RCK = 1;//输出
RCK = 0;//重置
}
/**
* @brief 点阵屏初始化
* @param 无
* @retval 无
*/
void MatrixLED_Init(){
SCK = 0;//初始化,当这个值为高电平时,进行移位操作
RCK = 0;//初始化,当这个值为高电平时,进行输出操作
}
/**
* @brief LED点阵屏显示一列数据
* @param Column 列号,范围:0~7,0在最左侧
* @param Data 选择列显示的数据,范围:0~0xFF,1为亮,0为灭
* @retval 无
*/
void MatrixLED_ShowColumn(unsigned char Column,Data){//操作列,
_74HC595_WriteByte(Data);//将设置亮的位置写入点阵中,
//1为点亮,这里是按为写入列数据,横向为阳极,故1才能点亮
MATRIX_LED_PORT = ~(0x80 >> Column);//选择列,0为选中,列为阴极,故0才能选中
Delay(1);//消影
MATRIX_LED_PORT = 0xFF;//位清零
}
main.c
#include <REGX52.H>
#include "Delay.h"
#include "MatrixLED.h"
unsigned char code Animation[] = {//放入flash存储中
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0xFF,0x08,0x08,0x08,0xFF,0x00,0x1E,0x25,
0x25,0x25,0x19,0x00,0xFE,0x01,0x02,0x00,
0xFE,0x01,0x02,0x00,0x1C,0x22,0x41,0x22,
0x1C,0x00,0x7D,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
};
void main(){
unsigned char i,offset=0,Count=0;
void MatrixLED_Init();
while( 1 ){
for( i = 0 ; i < 8 ; i++){
MatrixLED_ShowColumn(i,Animation[i + offset]);//这里取出八列进行显示
}
Count ++;
if(Count > 10){
Count = 0;
offset ++;//向后进行偏移
if(offset > 40){//当显示最后八列时,重置偏移量
offset = 0;
}
}
}
}
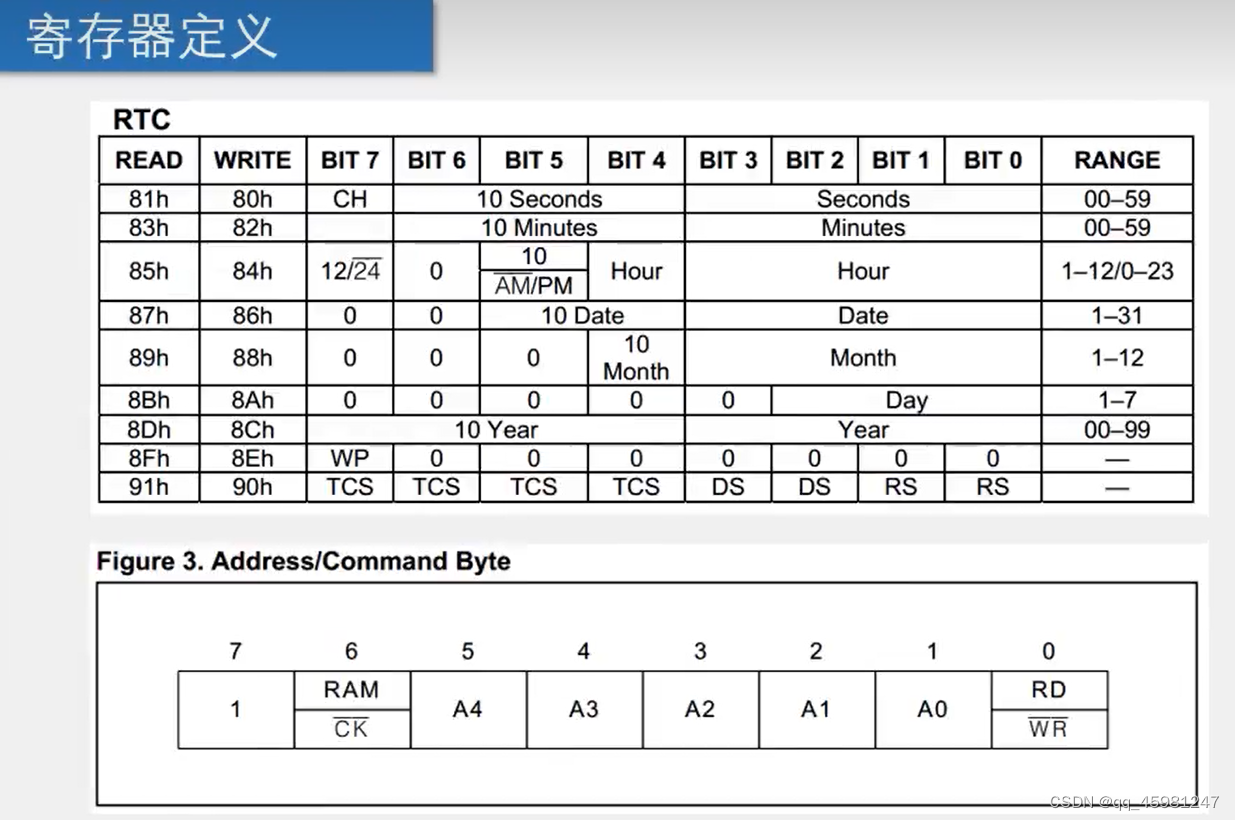
DS1302
点阵上方跳线帽放右边2个。?






DS1302时钟显示
DS1302.c
#include <REGX52.H>
//引脚定义
sbit DS1302_SCLK=P3^6;
sbit DS1302_IO=P3^4;
sbit DS1302_CE=P3^5;
//寄存器写入地址/指令定义
#define DS1302_SEC 0x80
#define DS1302_MIN 0x82
#define DS1302_HOUR 0x84
#define DS1302_DAY 0x86
#define DS1302_MONTH 0x88
#define DS1302_WEEK 0x8A
#define DS1302_YEAR 0x8C
#define DS1302_WP 0x8E
//时间数组,索引0~6分别为年、月、日、时、分、秒、星期
unsigned char DS1302_Time[]={24,1,20,23,59,55,6};
/**
* @brief DS1302初始化
* @param 无
* @retval 无
*/
void DS1302_Init(void)
{
DS1302_CE=0;
DS1302_SCLK=0;
}
/**
* @brief DS1302写一个字节
* @param Command 命令字/地址
* @param Data 要写入的数据
* @retval 无
*/
void DS1302_WriteByte(unsigned char Command,Data)
{
unsigned char i;
DS1302_CE=1;
for(i=0;i<8;i++)
{
DS1302_IO=Command&(0x01<<i);
DS1302_SCLK=1;
DS1302_SCLK=0;
}
for(i=0;i<8;i++)
{
DS1302_IO=Data&(0x01<<i);
DS1302_SCLK=1;
DS1302_SCLK=0;
}
DS1302_CE=0;
}
/**
* @brief DS1302读一个字节
* @param Command 命令字/地址
* @retval 读出的数据
*/
unsigned char DS1302_ReadByte(unsigned char Command)
{
unsigned char i,Data=0x00;
Command|=0x01; //将指令转换为读指令
DS1302_CE=1;
for(i=0;i<8;i++)
{
DS1302_IO=Command&(0x01<<i);
DS1302_SCLK=0;
DS1302_SCLK=1;
}
for(i=0;i<8;i++)
{
DS1302_SCLK=1;
DS1302_SCLK=0;
if(DS1302_IO){Data|=(0x01<<i);}
}
DS1302_CE=0;
DS1302_IO=0; //读取后将IO设置为0,否则读出的数据会出错
return Data;
}
/**
* @brief DS1302设置时间,调用之后,DS1302_Time数组的数字会被设置到DS1302中
* @param 无
* @retval 无
*/
void DS1302_SetTime(void)
{
DS1302_WriteByte(DS1302_WP,0x00);
DS1302_WriteByte(DS1302_YEAR,DS1302_Time[0]/10*16+DS1302_Time[0]%10);//十进制转BCD码后写入
DS1302_WriteByte(DS1302_MONTH,DS1302_Time[1]/10*16+DS1302_Time[1]%10);
DS1302_WriteByte(DS1302_DAY,DS1302_Time[2]/10*16+DS1302_Time[2]%10);
DS1302_WriteByte(DS1302_HOUR,DS1302_Time[3]/10*16+DS1302_Time[3]%10);
DS1302_WriteByte(DS1302_MIN,DS1302_Time[4]/10*16+DS1302_Time[4]%10);
DS1302_WriteByte(DS1302_SEC,DS1302_Time[5]/10*16+DS1302_Time[5]%10);
DS1302_WriteByte(DS1302_WEEK,DS1302_Time[6]/10*16+DS1302_Time[6]%10);
DS1302_WriteByte(DS1302_WP,0x80);
}
/**
* @brief DS1302读取时间,调用之后,DS1302中的数据会被读取到DS1302_Time数组中
* @param 无
* @retval 无
*/
void DS1302_ReadTime(void)
{
unsigned char Temp;
Temp=DS1302_ReadByte(DS1302_YEAR);
DS1302_Time[0]=Temp/16*10+Temp%16;//BCD码转十进制后读取
Temp=DS1302_ReadByte(DS1302_MONTH);
DS1302_Time[1]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_DAY);
DS1302_Time[2]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_HOUR);
DS1302_Time[3]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_MIN);
DS1302_Time[4]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_SEC);
DS1302_Time[5]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_WEEK);
DS1302_Time[6]=Temp/16*10+Temp%16;
}
main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "DS1302.h"
#include "instrins.h"
void main(){
LCD_Init();
DS1302_Init();
LCD_ShowString(1,3,"- - ");
LCD_ShowString(2,3,": : ");
DS1302_SetTime();//设置时间
while( 1 ){
DS1302_ReadTime();//读取时间
LCD_ShowNum(1,1,DS1302_Time[0],2);//显示年
LCD_ShowNum(1,4,DS1302_Time[1],2);//显示月
LCD_ShowNum(1,7,DS1302_Time[2],2);//显示日
LCD_ShowNum(2,1,DS1302_Time[3],2);//显示时
LCD_ShowNum(2,4,DS1302_Time[4],2);//显示分
LCD_ShowNum(2,7,DS1302_Time[5],2);//显示秒
//LCD_ShowNum(2,12,DS1302_Time[6],1);//显示周几
}
}DS1302时钟调节
main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "DS1302.h"
#include "Timer0.h"
#include "Key.h"
unsigned char KeyNum,MODE,TimeSetSelect,TimeSetFlashFlag;
/**
* @brief 从DS1302_Time数组中进行时间读取操作
* @param 无
* @retval 无
*/
void TimeShow(){
DS1302_ReadTime();//读取时间
LCD_ShowNum(1,1,DS1302_Time[0],2);//显示年
LCD_ShowNum(1,4,DS1302_Time[1],2);//显示月
LCD_ShowNum(1,7,DS1302_Time[2],2);//显示日
LCD_ShowNum(2,1,DS1302_Time[3],2);//显示时
LCD_ShowNum(2,4,DS1302_Time[4],2);//显示分
LCD_ShowNum(2,7,DS1302_Time[5],2);//显示秒
//LCD_ShowNum(2,12,DS1302_Time[6],1);//显示周几
}
/**
* @brief 进行时间修改操作
* @param 无
* @retval 无
*/
void TimeSet(){
if(KeyNum == 2)
{
//if(TimeSetSelect > 5)TimeSetSelect = 0;
TimeSetSelect++;
TimeSetSelect %= 6;//越界判断
}
if(KeyNum == 3)
{
DS1302_Time[TimeSetSelect] ++;//判断越界
if(DS1302_Time[0] > 99){DS1302_Time[0] = 0;}
if(DS1302_Time[1] > 12){DS1302_Time[1] = 1;}
if(DS1302_Time[1] == 1 || DS1302_Time[1] == 3 || DS1302_Time[1] == 5 ||
DS1302_Time[1] == 7 || DS1302_Time[1] == 8 ||DS1302_Time[1] == 10 ||
DS1302_Time[1] == 12)
{
if(DS1302_Time[2] > 31){DS1302_Time[2] = 1;}
}
else if(DS1302_Time[1] == 4 || DS1302_Time[1] == 6 ||DS1302_Time[1] == 9||
DS1302_Time[1] == 11)
{
if(DS1302_Time[2] > 30){DS1302_Time[2] = 1;}
}
else if(DS1302_Time[1] == 2)
{
if(DS1302_Time[0]%4 == 0)
{
if(DS1302_Time[2] > 29){DS1302_Time[2] = 1;}
else
{
if(DS1302_Time[2] > 28){DS1302_Time[2] = 1;}
}
}
}
if(DS1302_Time[3] > 23){DS1302_Time[3] = 0;}
if(DS1302_Time[4] > 59){DS1302_Time[4] = 0;}
if(DS1302_Time[5] > 59){DS1302_Time[5] = 0;}
}
if(KeyNum == 4){
DS1302_Time[TimeSetSelect] --;
if(DS1302_Time[0] < 0){DS1302_Time[0] = 99;}
if(DS1302_Time[1] < 1){DS1302_Time[1] = 12;}
if(DS1302_Time[1] == 1 || DS1302_Time[1] == 3 || DS1302_Time[1] == 5 ||
DS1302_Time[1] == 7 || DS1302_Time[1] == 8 ||DS1302_Time[1] == 10 ||
DS1302_Time[1] == 12)
{
if(DS1302_Time[2] < 1){DS1302_Time[2] = 31;}
if(DS1302_Time[2] > 31){DS1302_Time[2] = 1;}
}
else if(DS1302_Time[1] == 4 || DS1302_Time[1] == 6 ||DS1302_Time[1] == 9||
DS1302_Time[1] == 11)
{
if(DS1302_Time[2] < 1){DS1302_Time[2] = 30;}
if(DS1302_Time[2] > 30){DS1302_Time[2] = 1;}
}
else if(DS1302_Time[1] == 2)
{
if(DS1302_Time[0]%4 == 0)
{
if(DS1302_Time[2] < 1){DS1302_Time[2] = 29;}
if(DS1302_Time[2] > 29){DS1302_Time[2] = 1;}
else
{
if(DS1302_Time[2] < 1){DS1302_Time[2] = 28;}
if(DS1302_Time[2] > 28){DS1302_Time[2] = 1;}
}
}
}
if(DS1302_Time[3] < 0){DS1302_Time[3] = 23;}
if(DS1302_Time[4] < 0){DS1302_Time[4] = 59;}
if(DS1302_Time[5] < 0){DS1302_Time[5] = 59;}
}
if(TimeSetSelect == 0 && TimeSetFlashFlag == 1){LCD_ShowString(1,1," ");}
else{LCD_ShowNum(1,1,DS1302_Time[0],2);}
if(TimeSetSelect == 1 && TimeSetFlashFlag == 1){LCD_ShowString(1,4," ");}
else{LCD_ShowNum(1,4,DS1302_Time[1],2);}
if(TimeSetSelect == 2 && TimeSetFlashFlag == 1){LCD_ShowString(1,7," ");}
else{LCD_ShowNum(1,7,DS1302_Time[2],2);}
if(TimeSetSelect == 3 && TimeSetFlashFlag == 1){LCD_ShowString(2,1," ");}
else{LCD_ShowNum(2,1,DS1302_Time[3],2);}
if(TimeSetSelect == 4 && TimeSetFlashFlag == 1){LCD_ShowString(2,4," ");}
else{LCD_ShowNum(2,4,DS1302_Time[4],2);}
if(TimeSetSelect == 5 && TimeSetFlashFlag == 1){LCD_ShowString(2,7," ");}
else{LCD_ShowNum(2,7,DS1302_Time[5],2);}
LCD_ShowNum(2,10,TimeSetSelect,2);
LCD_ShowNum(2,13,TimeSetFlashFlag,2);
}
void main(){
LCD_Init();
DS1302_Init();
Timer0Init();
LCD_ShowString(1,3,"- - ");
LCD_ShowString(2,3,": : ");
DS1302_SetTime();//设置时间
while( 1 ){
KeyNum = Key();
if(KeyNum == 1){
if(MODE == 0){
MODE = 1;TimeSetSelect = 0;
}else if(MODE == 1){
MODE = 0;
DS1302_SetTime();
}
}
switch(MODE){
case 0:TimeShow();break;
case 1:TimeSet();break;
}
}
}
/**
* @brief 中断操作
* @param 无
* @retval 无
*/
void Timer0_Routine() interrupt 1{
static unsigned int T0Count;
T0Count ++;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
if( T0Count >= 500 ){
T0Count = 0;
TimeSetFlashFlag = !TimeSetFlashFlag; //是否修改标志位
}
}
文章来源:https://blog.csdn.net/qq_45981247/article/details/135682654
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Java项目开发:基于Java+spingboot+vue汽车租赁系统的设计与实现
- 认识Linux指令之 “man” 指令
- 京东销售数据哪里看?京东平台销量销额数据查询软件推荐!
- 【深度学习目标检测】九、基于yolov5的路标识别(python,目标检测)
- 工作总结:停止自嗨、走进用户,努力提供有价值的服务
- IDEA常用快捷键三-----文本选择
- 设计模式-多例模式
- Python - 操作 docx
- mysql修改数据表自增步长
- opencv 插值方法