【LV12 DAY13 UART 串口通信】
发布时间:2024年01月11日
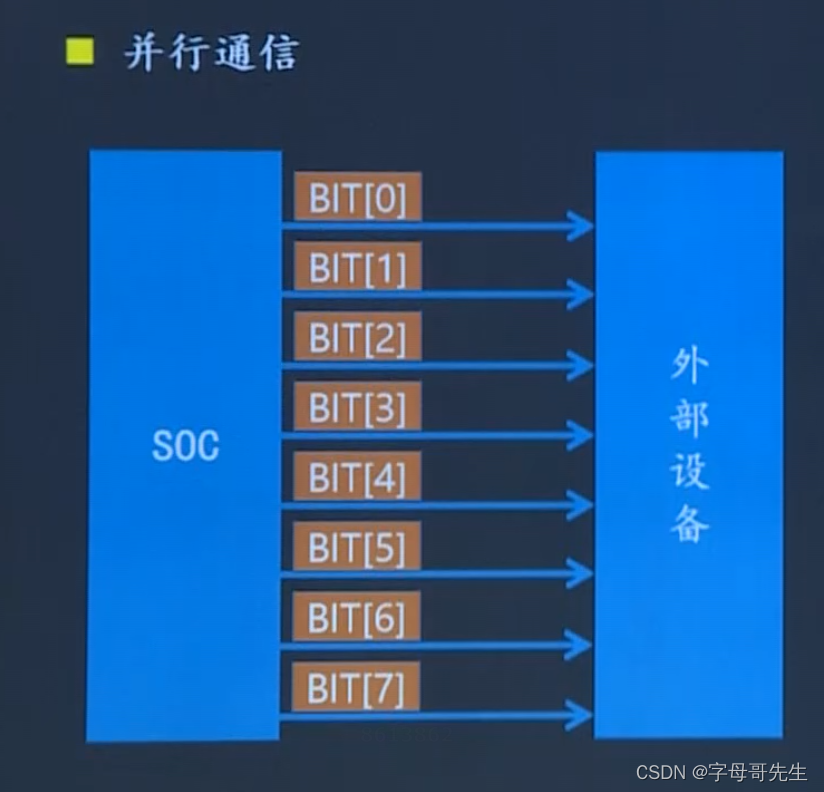
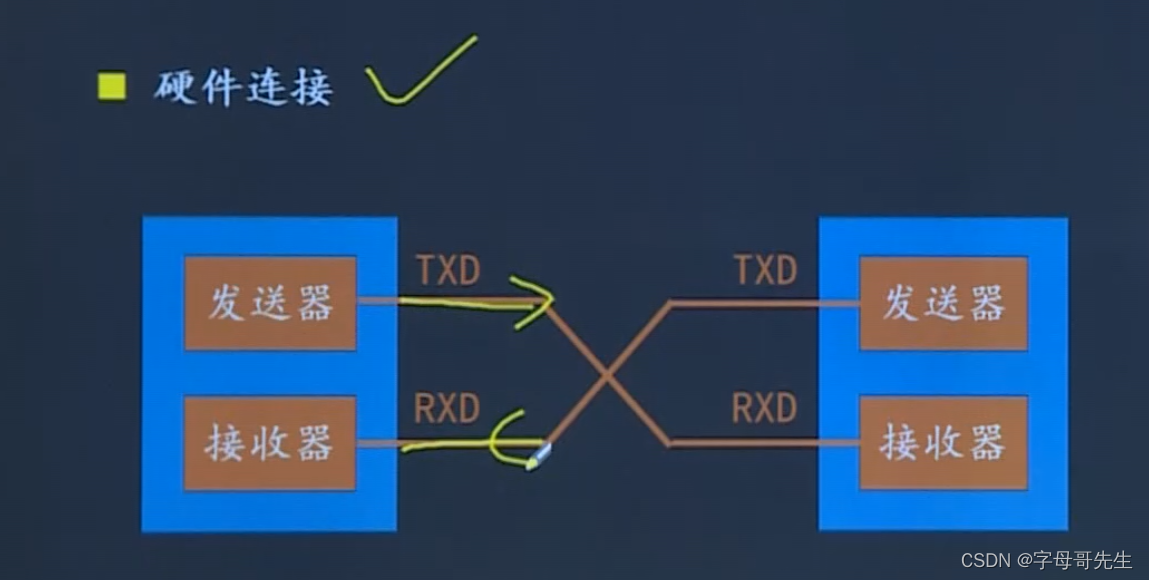
UART–(一种通信协议)
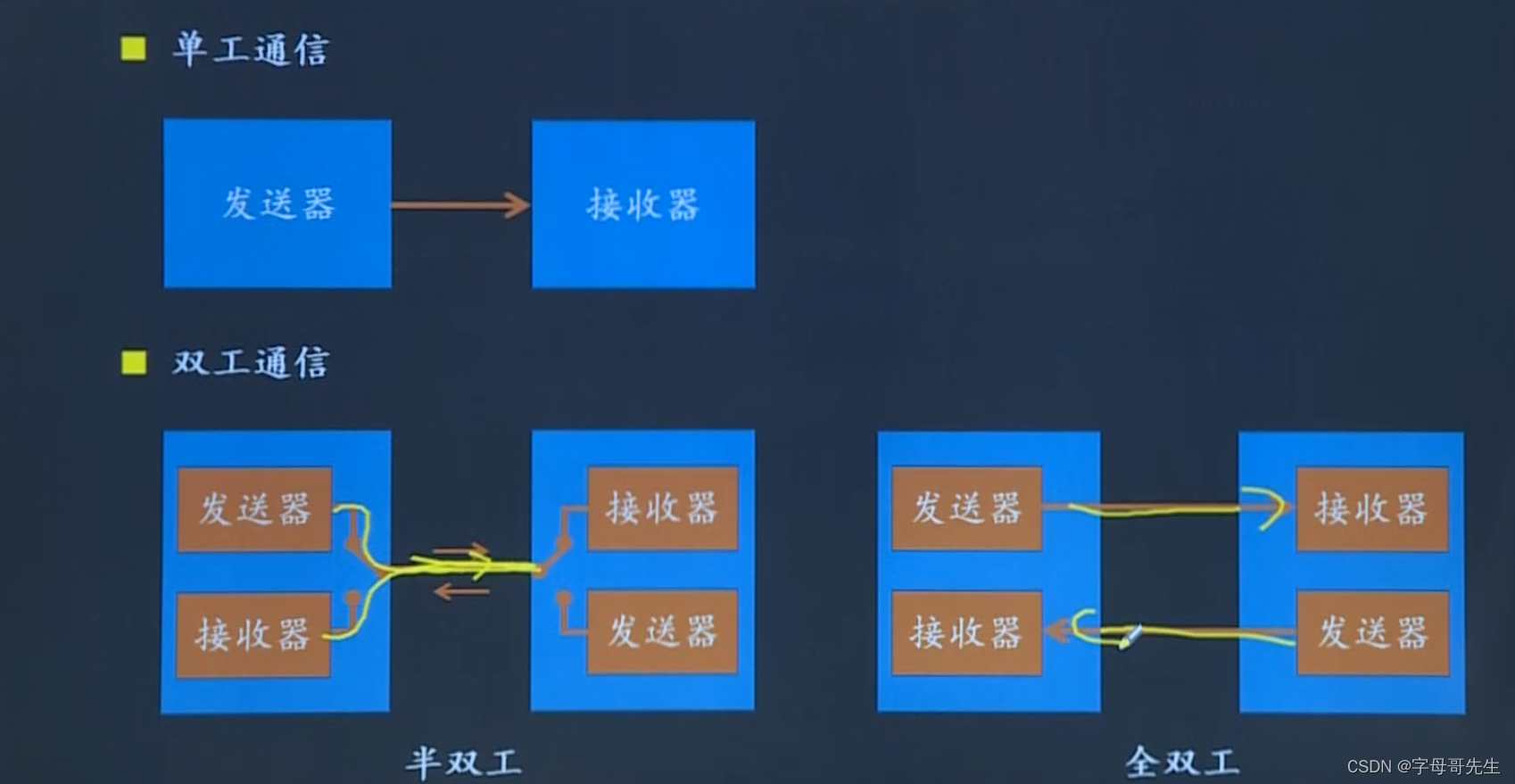
通用异步收发器,是一种通用的串行,异步通信总线,该总线有两条数据线,可以实现全双工的发送和接收,在嵌入式系统中常用于主机与辅助设备之间的通信。
波特率
波特率用于描述UART通信时的通信速度,其单位bps是指每秒传输的bit的数量。
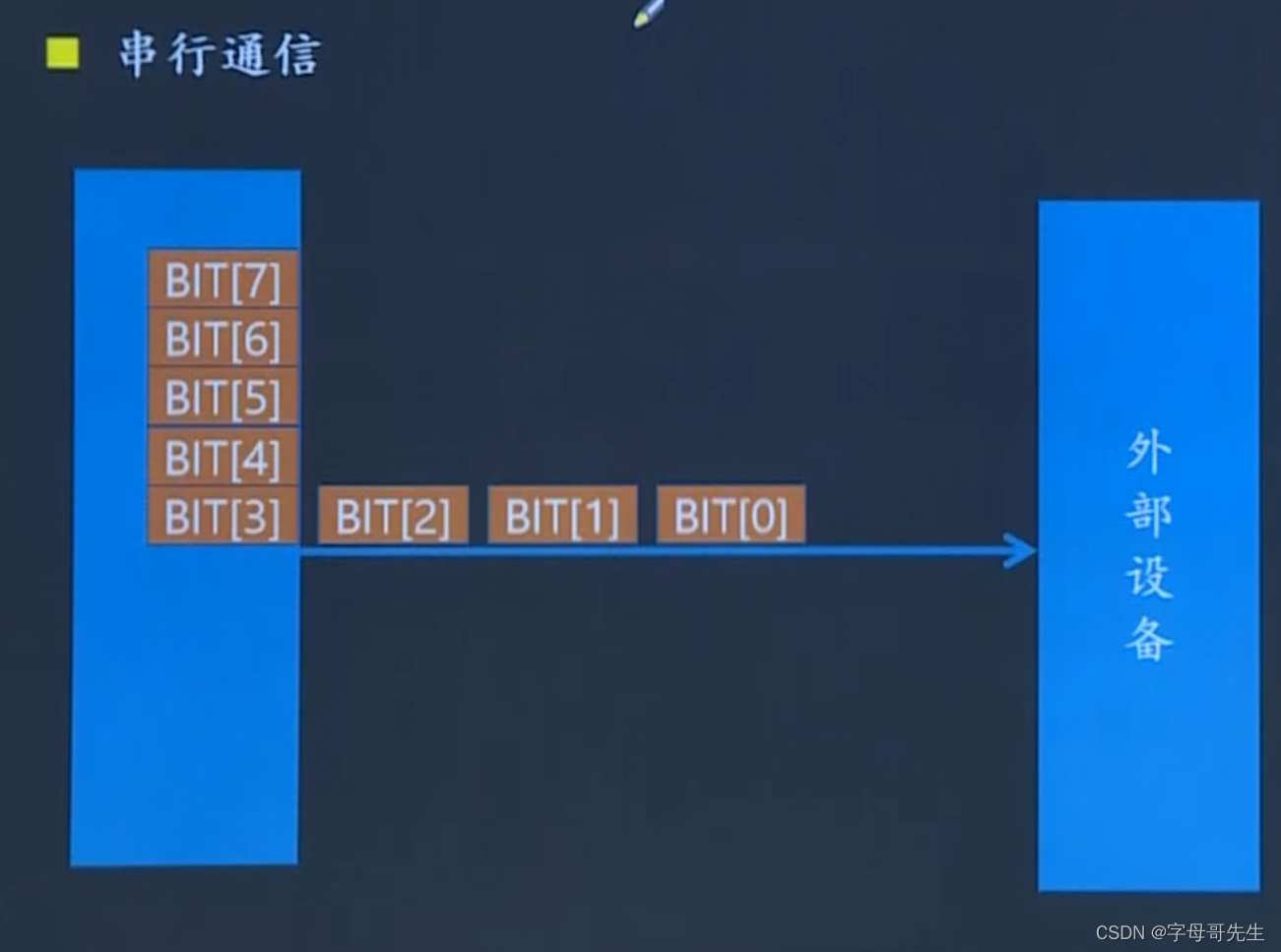
一次只能发送一个字节,串口通信不能累计发送,避免累积误差(例如1s发送1,接收方看到的是0.9s,依次10s即有1位的偏差)。
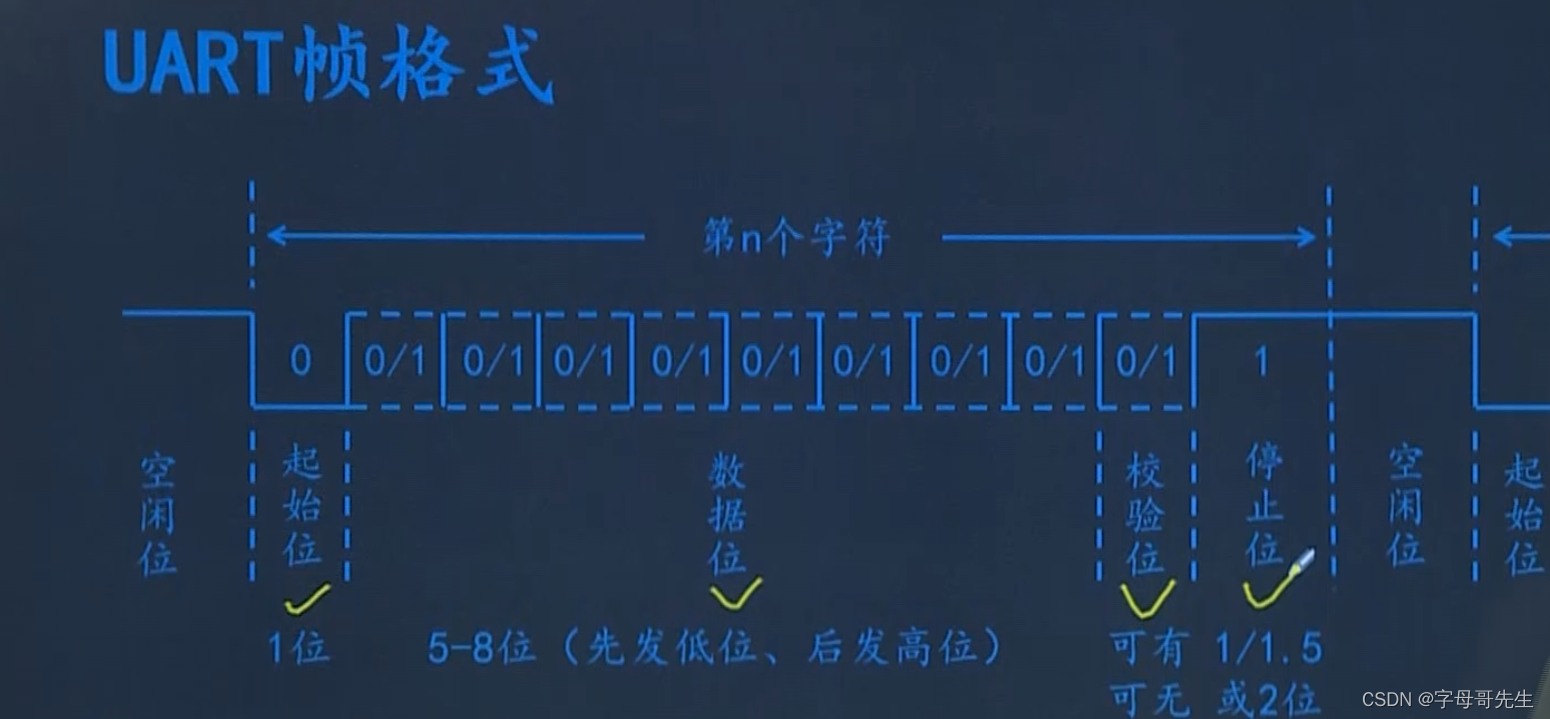
异步通信就是发送方和接收方的时钟不同步。
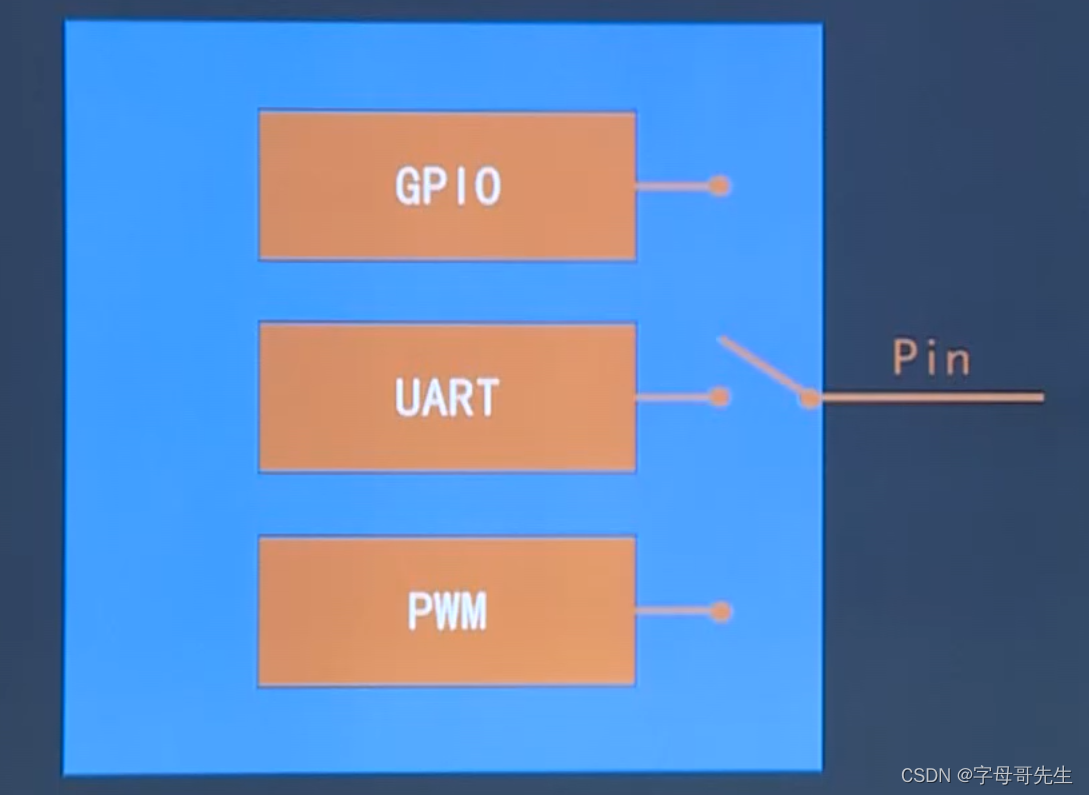
设置引脚功能—实质上是让引脚在芯片内部连接到某一个对应的控制器上。
 UART寄存器详解
UART寄存器详解
1.轮询模式,CPU通过不断访问串口读取数据
2.中断模式,串口有数据时打断CPU,请求CPU访问读取
3.DMA模式,串口直接把数据放入缓冲区,不需要CPU访问。
实现串口通信
#include "exynos_4412.h"
void UART_Init()
{
//1.将GPA1_0,GPA1_1设置为接收引脚和发送引脚
GPA1.CON=GPA1.CON & (~(0XFF))|(0X22) ;
//2.设置UART2帧格式 ULCON2 8位数据位 1位停止位 无校验 正常模式
UART2.ULCON2=UART2.ULCON2 & (~(0x7F))|(0x3);
//3.设置UART2发送模式为轮训模式
UART2.UCON2=UART2.UCON2 & (~(0XF))|(0X5);
//4.设置UART2的波特率为115200 UBRDIV2/UFRACVAL2/
UART2.UBRDIV2=53;
UART2.UFRACVAL2=4;
}
void UART_Send(char dat)//开发板发送数据给电脑
{
//判断发送寄存器是否为空//
while(!(UART2.UTRSTAT2&(1<<1)));
//将要发送的数据写入寄存器UTXH
UART2.UTXH2=dat;
}
char UART_Rec(void)//开发板接受数据
{
char rec;
if(UART2.UTRSTAT2& 1)
{
rec=UART2.URXH2;
return rec;
}
else
{
return 0;
}
}
int main()
{
char recvdat=0;
UART_Init();
while(1)
{
recvdat=UART_Rec();
if(recvdat==0)
{
}
else
{
recvdat++;
UART_Send(recvdat);
}
}
return 0;
}
作业
在终端上输入‘2’,LED2点亮,再次输入‘2’,LED2熄灭… …
int main()
{
GPX2.CON = GPX2.CON & (~(0xF << 28)) | (0x1 << 28);
UART_Init();
int count=0;
char rec=0;
while(1)
{
if(rec=UART_Rec())
count++;
/*点亮LED2*/
if(count%2==0)
GPX2.DAT = GPX2.DAT | (1 << 7);
/*延时*/
// delay(1000000);
/*熄灭LED2*/
else
GPX2.DAT = GPX2.DAT & (~(1 << 7));
/*延时*/
// delay(1000000);
}
return 0;
}
文章来源:https://blog.csdn.net/m0_46112340/article/details/135510430
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Spring-IOC-xml方式
- yolov8实时推理目标识别、区域分割、姿态识别 Qt GUI
- 【Unity资源管理】任何导入资源的配套导入器AssetImporter
- 微信视频号提取视频工具和提取器有什么不同?怎么下载和使用!
- 送你一台云电脑
- 基于Pytorch做深度学习,但是代码水平很低,应该如何学习呢?
- 防止头文件重复包含
- Git教程学习:04 查看提交历史
- 解锁测试性能瓶颈:深度探讨JMeter分布式性能测试!
- JavaWeb 学生信息管理系统