基于双阀值区间扰动观察法与带预测模型模糊PID控制法的光伏MPPT控制仿真模型
微?关注“电气仔推送”获得资料(专享优惠)
简介:
基于分段变步长的光伏MPPT控制模型
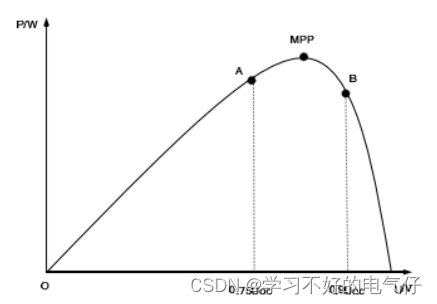
将光伏电池 输出特性划分为区间内(最大功率点附近)和区间外(远离最大功率点)。在区间外采用固定大步长扰动观察法追踪,确保快速追踪到MPP点附近区域;在区间内以带预测模型的模糊PID控制法进行追踪,对MPP点稳定性进行优化。根据恒定电压法 原理可知,最大功率点与开路电压存在近似线性关系:?
![]()
K的理论值在0.75~0.9。本文设置最大功率点在电压(Umin, Umax)区间内取得,令Umin=0.75Uoc, Umax=0.9Uoc
,如图所示为分段变步长MPPT控制法。
分段变步长MPPT控制的分段区间为:
①U<Umin :固定较大步长扰动观察法;
②Umin ≤U ≤Umax: 带预测模型的模糊PID控制;
③ U>Umax:固定较大步长扰动观察法。
利用选择控制开关switch模块对分段区域的电压进行判定,实现两种方法切换, 具体控制过程与单一控制方法一致。
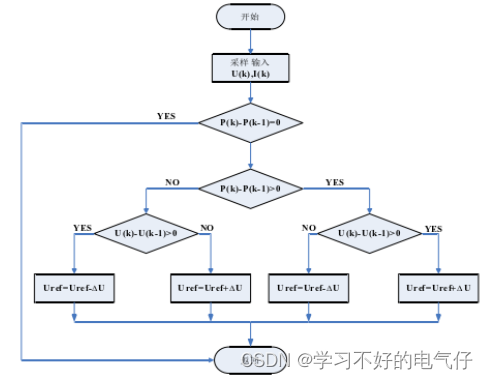
扰动观察法控制框图
带预测模型的模糊PID控制框图
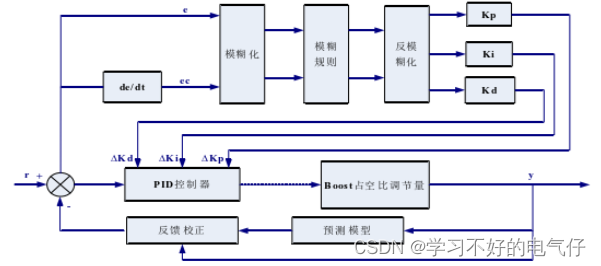
在线滚动优化模型参数,将预测模型的输出值与实际 输入值比较的偏差和偏差变化率输入到模糊PID控制器,构成了带预测模型的模糊 PID控制,来预测系统未来的输出。
仿真模型


此模型设置光照强度由800-1000-1200,在1000光照强度下的额定输出为10kW。仿真时长为0.1s,光伏输出如下图所示:

分段变步长MPPT控制,无论在稳定或变化 环境下,都能根据系统所处状态进行准确判定,而且加入了预测控制模块,在线滚 动优化模型参数,使控制的稳态精度也有了很好地保证,提高了控制品质。仿真结果表明:该方法跟踪到MPP点所用时间最短,功率振荡和超调量不明显,相对误差 小,达到了跟踪速度快,稳态精度高的预期效果。?
该模型同样包含文章的数据仿真,效果与文章一致。
本文参考文献(如有不妥,请联系删除):
基于分段变步长MPPT的离网光伏发电系统研究——孔洪洪
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- vue 工作记录登录后的一些好方法
- Springboot和Spring有什么区别
- 请查收“链上天眼”2023年成绩单
- 磁盘类型选择对阿里云RDS MySQL的性能影响
- 【代码解析】代码解析之文件下载(1)
- 鸿蒙HarmonyOS开发用什么语言
- Spring中的Bean是否线程安全?
- 力扣:977. 有序数组的平方59. 螺旋矩阵 II
- Vue+ElementUI+Axios实现携带参数的文件上传(数据校验+进度条)
- 【C语言】ipoib模块 - ipoib_send_rss函数