基于Matlab/Simulink的MIL仿真验证解决方案
文章目录
????????针对模型开发阶段的ECU算法,可以很直接地将其与虚拟车辆模型连接起来,通过MIL对其进行验证和确认。可以在开发过程的早期检测到设计错误和不正确的需求,也有助于安全地研究边缘情形,从而节省宝贵的开发时间并提高产品质量。示例如下:

需求追溯
????????从需求到整个设计过程,以及最终应用的追溯,可以使用Requirements Toolbox来完成。包括了模型、测试、需求文档之间的双向链接,生成和使用测试用例,生成所需的报告等。Requirements Toolbox也可集成到自己已有的需求管理系统,建立最小化人工干预的架构,并确保可维护性。示例如下:
虚拟环境
????????对于整车控制算法,可以搭建虚拟车辆模型和道路模型。对于BMS算法,可以搭建虚拟的电池模型。对于自动驾驶应用,可以创建各种详细的传感器模型,例如相机、激光雷达、雷达和超声波传感器。示例如下:

模型检查
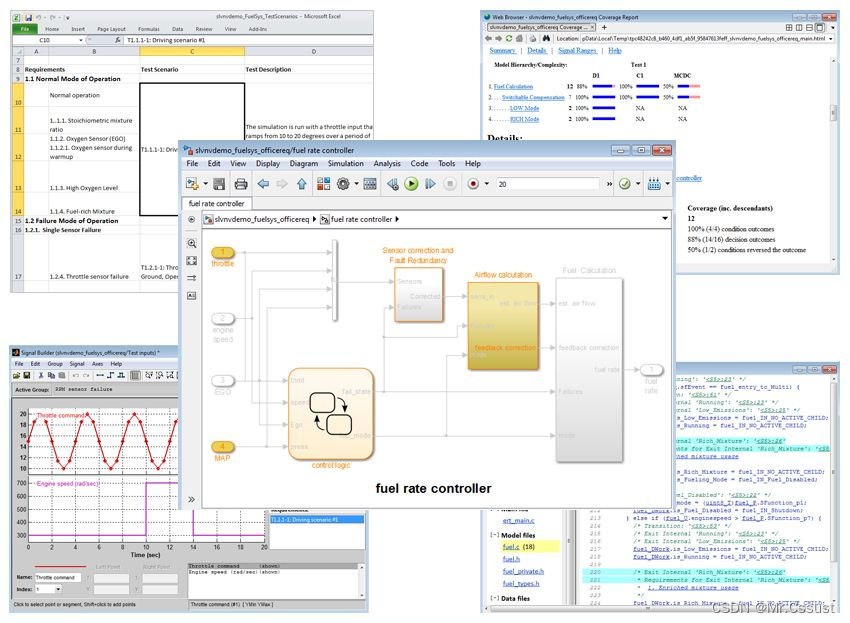
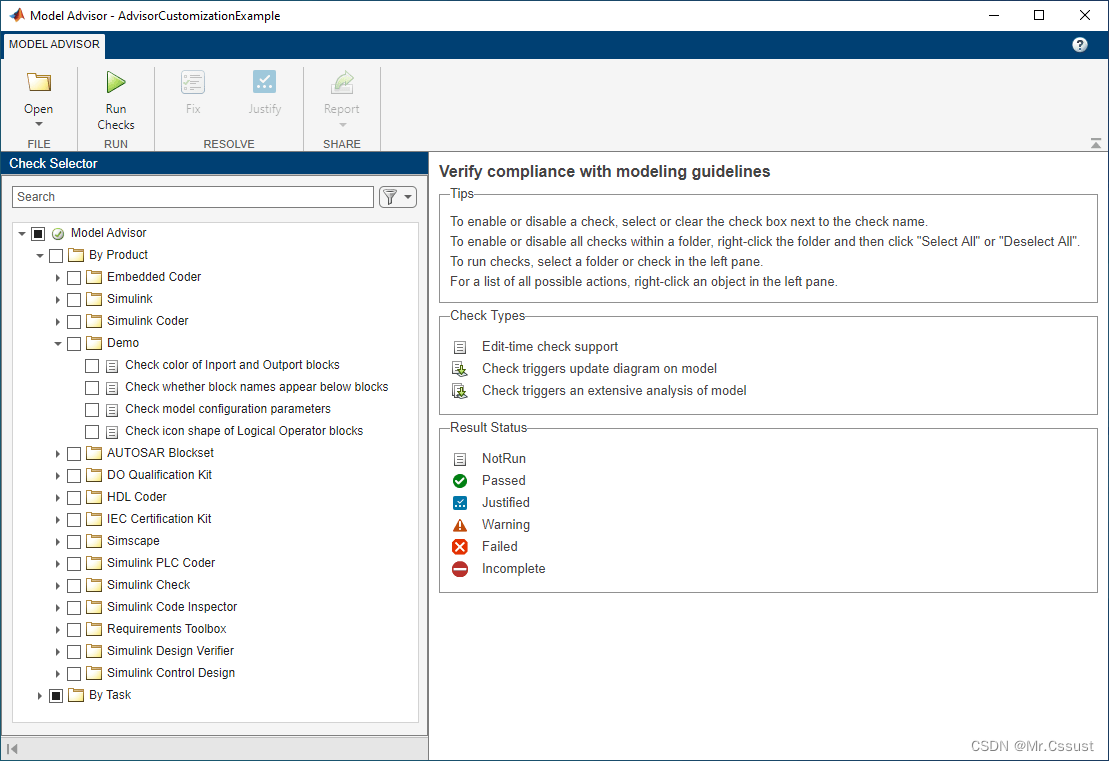
????????通过模型在环 (MIL)对ECU算法模型进行等效性测试验证,可以用Simulink Check、 Simulink Coverage、Simulink Design Verifier三个工具来完成。使用Simulink Check可以验证特定行业应用的建模标准或安全标准的合规性,实现自定义建模检查和分析。使用 Simulink Design Verifier 生成测试框架,检测死逻辑、整数溢出、除以零等错误,可以进一步增强自己对设计的信心。在模型级别应用 Simulink Coverage 覆盖率分析,可以评估现有测试用例的质量。示例如下:
仿真验证
????????使用虚拟的参数化场景,对ECU算法模型进行仿真验证,是MIL过程中至关重要的一部分。借助 MATLAB、Simulink 和多种附加产品,可以交互式创建复杂的三维路网和标记,或者通过导入高清地图数据生成路网区域,然后添加交通参与者和轨迹。为了对相机、雷达和激光雷达传感器进行仿真,可以利用在 Unreal? 环境中运行的传感器模型与 Simulink 协同仿真。示例如下:

????????对于电气化动力总成系统开发或其他传统车辆应用,可使用一套预定义的驾驶操作或标准的行驶工况数据来快速评估ECU算法模型。当然上述标准驾驶操作或行驶工况,可以支持对其自定义修改。另外也可以根据实车中记录的测试数据,合成自定义行驶工况。
测试报告
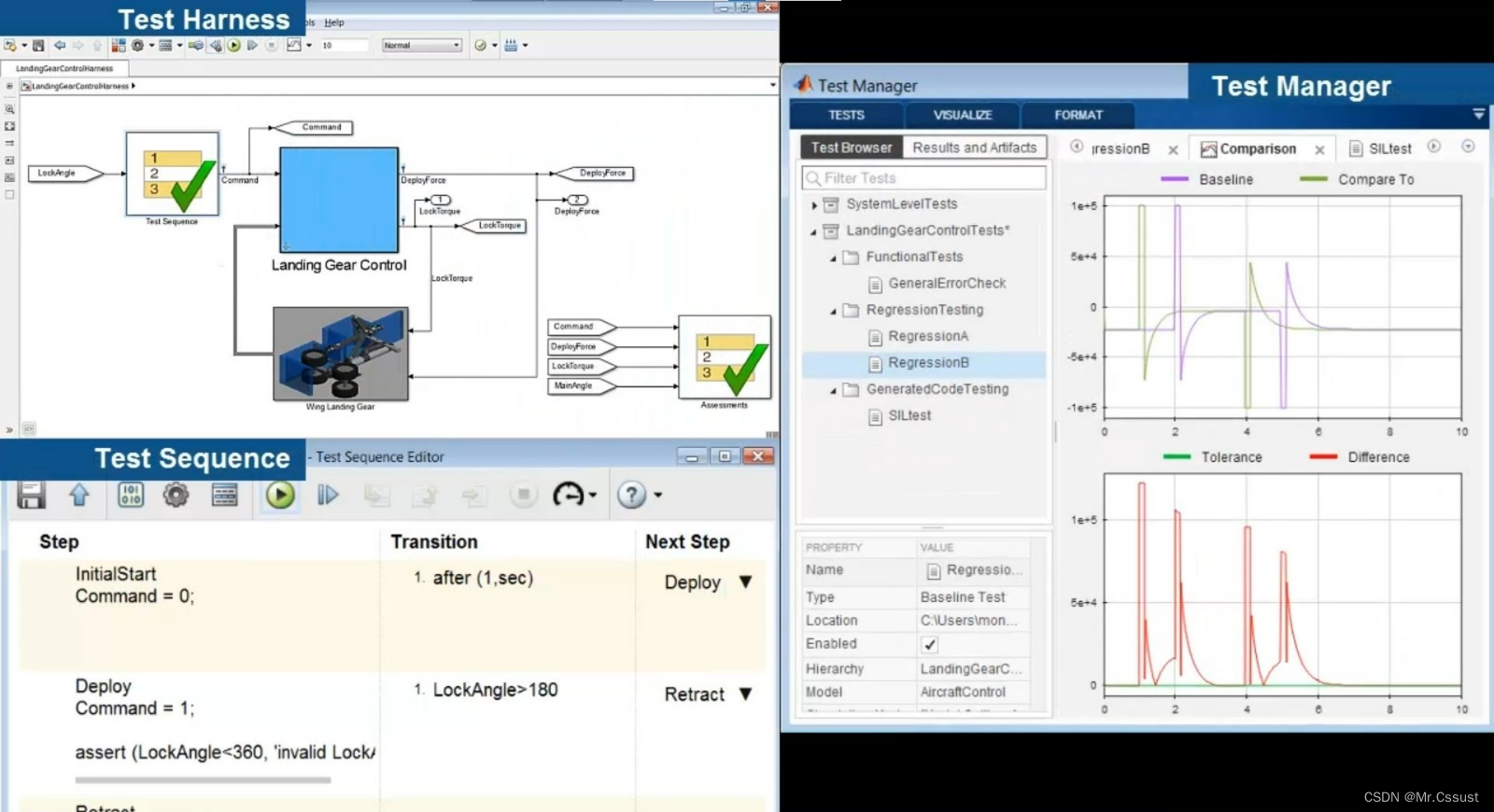
????????使用 Simulink Test 灵活地执行测试,并报告测试结果,可以根据您所在组织的标准自动生成仿真测试报告。测试的模式包括功能测试、单元测试、回归测试、背靠背测试等。另外也可以实现大规模自动化测试,并且也支持将其与第三方工具连接起来。示例如下:
参考文献
????????《使用基于模型的设计进行早期验证和确认》
????????版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
????????文中部分图片来源自网络,若有侵权,联系立删。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- flask-sqlalchemy中的基本sql操作
- 【机器学习实例讲解】机器学习-鸢尾花数据集多分类第02课
- Seer*Stat乳腺癌数据预测模型-Step1数据清洗和预处理
- 如何实现一个 RPC 框架?
- 腾讯云老用户怎样变成新用户享受“新用户专享”?
- 鸿蒙开发组件之DatePicker
- 15.辐射度量学
- tp5 rewrite nginx重写
- 细说CubeIDE——之建立一个工程
- 【计算机组成原理】程序的转换及机器级表示 常用计算机术语英文缩写汇总