485串口modbus rtu协议继电器模块学习与应用案例
485串口Modbus rtu协议继电器模块学习与应用案例
1 继电器简介
继电器是一种重要的电子控制器件,广泛应用于各种电气系统中。它通常由一个线圈、一个触点和一个机械机构组成,通过控制线圈的电流来驱动机械机构,从而实现对触点的通断控制。主要作用是实现电路的自动控制和保护。在工业自动化、汽车、家电等领域,继电器被广泛应用于各种控制系统中,如PLC、DCS、电机控制等。通过继电器的控制,可以实现各种逻辑控制、顺序控制、时间控制等功能,提高系统的自动化程度和可靠性。
继电器还具有高可靠性、高稳定性、高灵敏度等特点。由于继电器的机械机构和触点都是经过特殊设计和制造的,因此具有较高的耐久性和可靠性。同时,继电器还具有高灵敏度,能够快速响应外部信号的变化,确保系统的稳定性和可靠性。此外,继电器还具有多种类型和规格,可以根据不同的应用需求进行选择。例如,根据触点的数量和类型,可以分为单触点继电器和多触点继电器;根据工作电压和电流的大小,可以分为直流继电器和交流继电器等。

2 串口参数设置
通讯串口参数主要有串口波特率、数据位、停止位、校验位等参数
串口波特率:常见的有2400,4800,9600,14400,19200,38400,56000,57600,115200,230400,460800,921600
数据位:常见的为7、8数据位
停止位:常见的为1、2数据位
校验位:常见的有无校验、偶校验、奇校验
3 Modbus指令解析
Modbus协议是一种工业控制总线协议,由Modicon(现为施耐德电气公司的一个品牌)在1979年发明。它是全球第一个真正用于工业现场的总线协议。基于Modbus协议的系统由带智能终端的可编程逻辑控制器和计算机通过公用线路或局部专用线路连接而成。
Modbus协议采用主-从结构,为客户机和服务器之间提供通信连接。在Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。如果需要回应,控制器将生成反馈信息并用Modbus协议发出。
详细说明可以看这篇文章MODBUS常用功能码学习及实例,这里我们只做简单介绍
以下是一个Modbus指令实例,用于控制继电器:
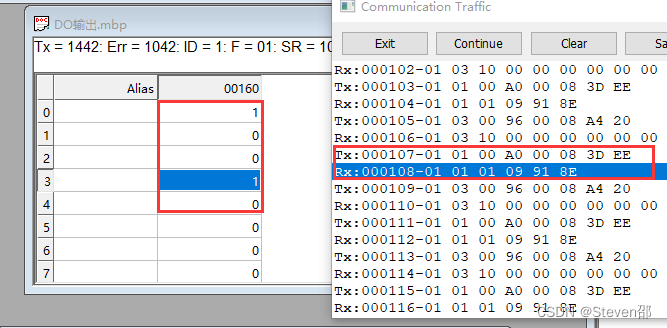
TX: 01 01 00 A0 00 08 3D EE
主机发送数据包括:从站地址+功能码+寄存器起始地址+寄存器数量+校验码
| 从站地址 | 功能码 | 寄存器起始地址高8位 | 寄存器起始地址低8位 | 寄存器数量高8位 | 寄存器数低8位 | CRC校验低8位 | CRC校验高8位 |
|---|---|---|---|---|---|---|---|
| 0x01 | 0x01 | 0x00 | 0xA0 | 0x00 | 0x08 | 0x3D | 0xEE |
RX: 01 01 01 09 91 8E
从站响应返回数据包括:从站地址+功能码+返回字节数+数据值+校验码
| 从站地址 | 功能码 | 返回字节数 | data1 | CRC校验低8位 | CRC校验高8位 |
|---|---|---|---|---|---|
| 0x01 | 0x01 | 0x01 | 0x09 | 0x91 | 0x8E |
data1数据:0x09代表着二进制1001,此处为开启第一路和第四路继电器
4 用Modbus poll实现继电器的开关
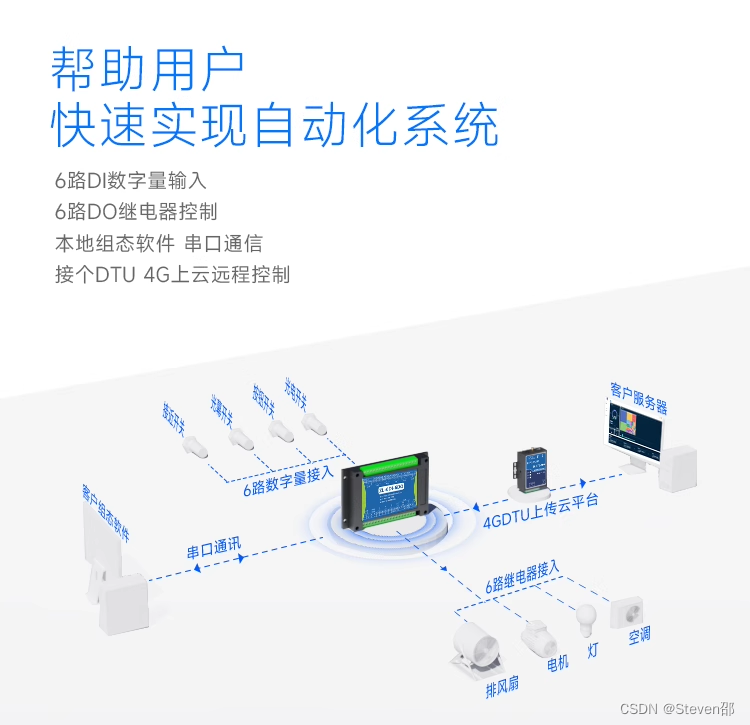
我们这里选用展联科技DEVELPLOPINK的串口继电器控制模块进行测试
选择的理由是他的高可靠性和高性价比,另外配套他家的DTU可以轻松实现远程检测控制
继电器链接
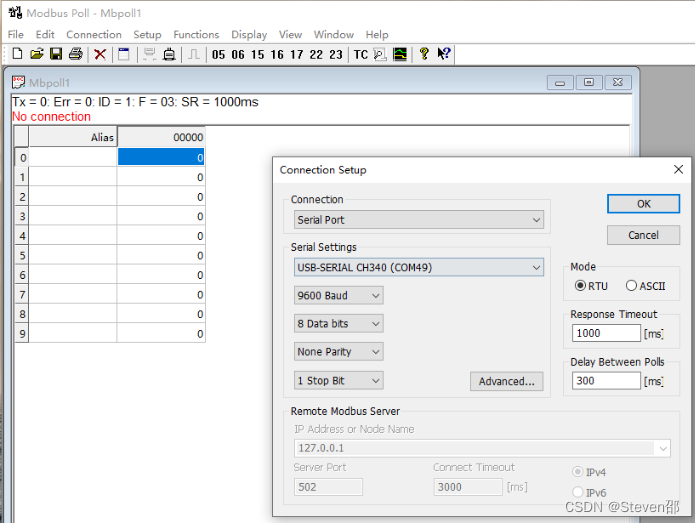
- 通过Modbus Poll 工具进行连接
设备地址默认为1,通信波特率默认为9600,8位数据位,1位停止位,无校验位(9600,8,N,1)
2. 修改Modbus地址位
点击OK后出现地址不合法,需要修改地址,右键展开扩展,点击Read/write Definition
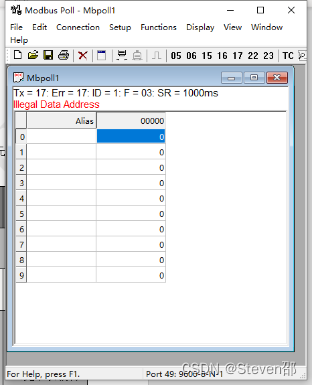
修改地址为160,即可查看继电器状态

3. 控制继电器开关
双击第一路继电器值,修改其Value值为1,点击Send,即可控制继电器开,同理将1修改为0,即可控制继电器关闭;

5 通过ZL400 4G DTU网关,实现继电器的远程控制
DTU链接
 如图配置DTU
如图配置DTU
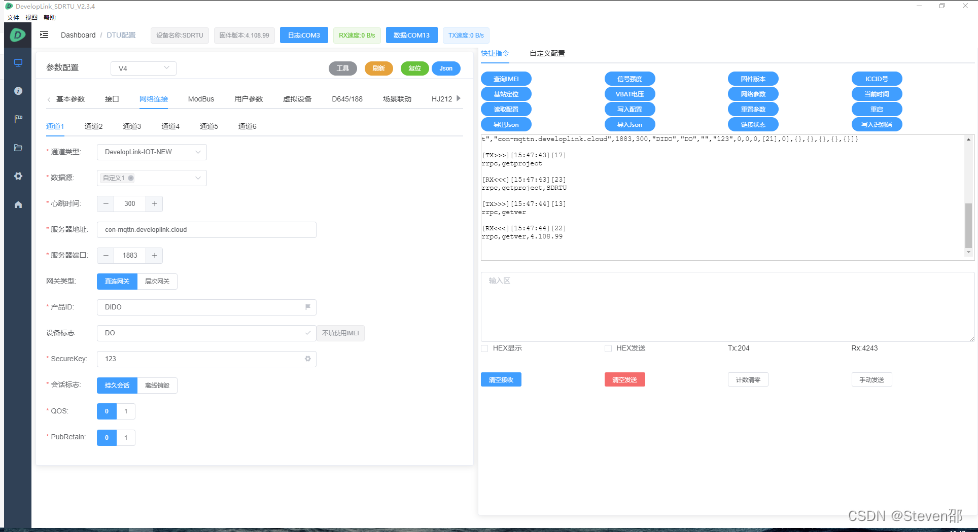

配置完成后打开数据云平台
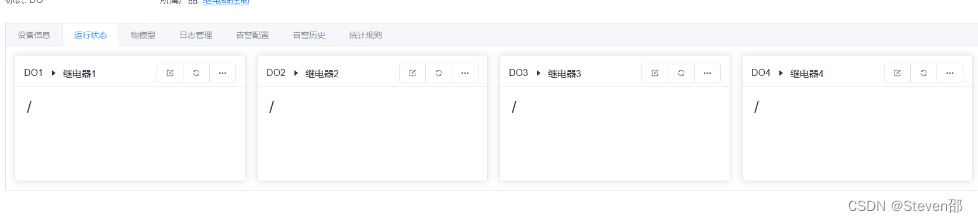 点击下发,即可修改继电器状态.
点击下发,即可修改继电器状态.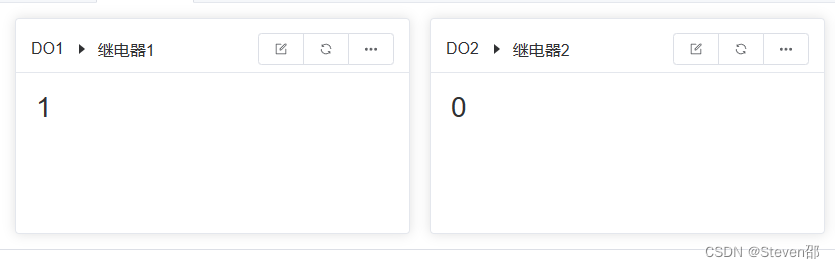
6 使用场景与应用案例
6.1 DI输入接线图
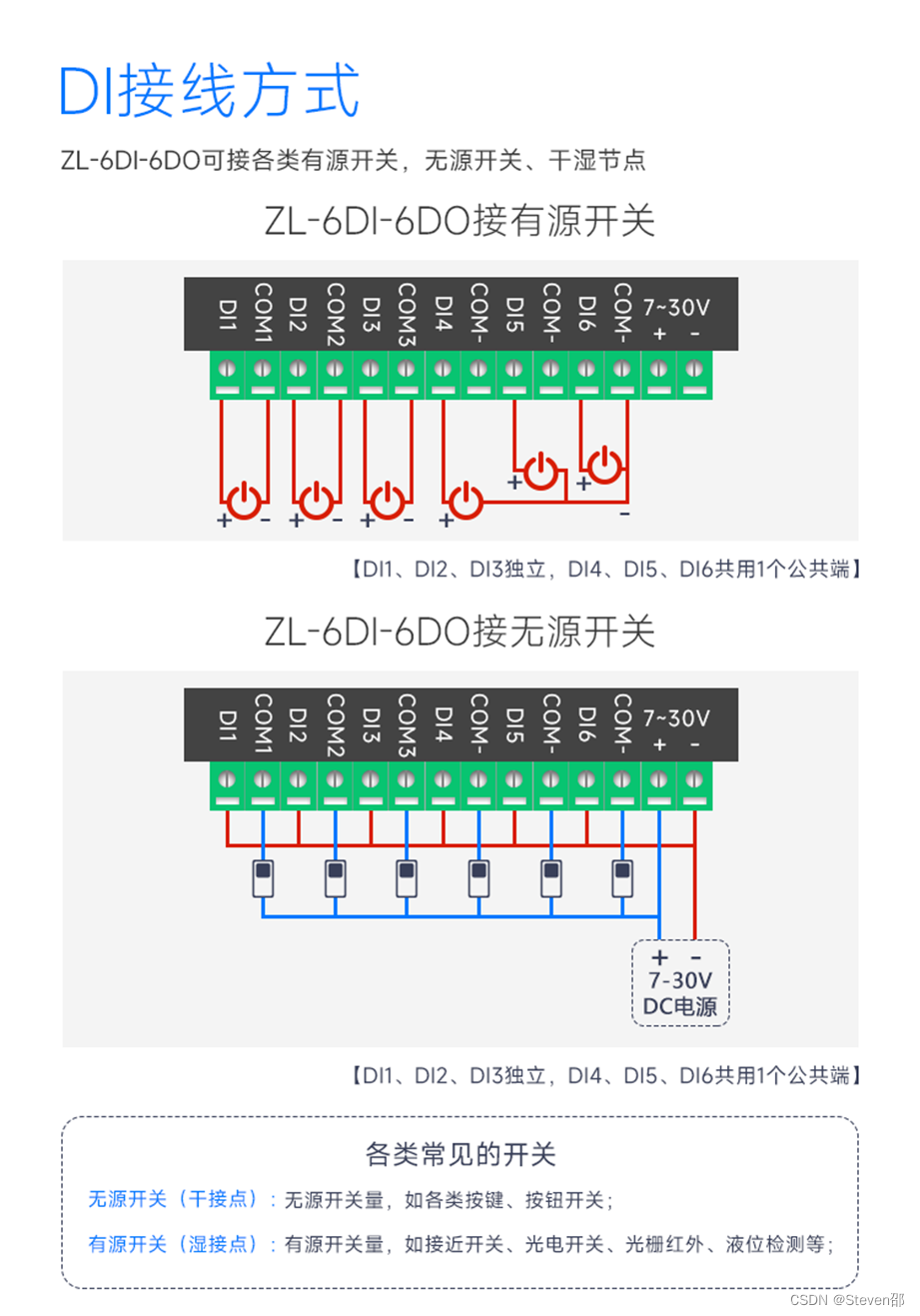
6.2 DO输出接线图

————————————————————————————————————————
对物联网技术感兴趣请加入我们交流群,欢迎各种技术交流,
QQ群: 830407941
对我们产品感兴趣请查看淘宝,免费定制项目:
DEVELOPLINK__串口继电器模块
DEVELOPLINK __DTU边缘网关
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【开源】基于JAVA语言的创意工坊双创管理系统
- 9、Numpy视图与拷贝
- Linux中SCP文件传输工具详解
- 开源的测试平台快2千星了,能带来多少收益呢
- C#操作pdf之使用itext实现01-生成一个简单的table
- 修复现网漏洞扫描结果项:ZooKeeper 未授权访问[原理扫描]
- MySQL修改登录密码
- esp32配置arduino开发环境
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写
- 云原生架构未来发展趋势,探索容器技术未来的发展趋势