Linkage Mapper 各工具参数详解——Barrier Mapper
【小白一学就会无需其他教程】此文档用于解析使用Linkage?Mapper?各输入输出参数详情以及可能的影响,并介绍了如何解释模型输出结果和输出参数,适合刚入手的人。篇幅很长很啰嗦,是因为每个参数都解释的万分细致。
?从以下链接中获取内容(识别二维码、填写问卷、获取联系方式)
Linkage Mapper 报错_python error on **line 806** of lm_util.py in link-CSDN博客
- Barrier?Mapper

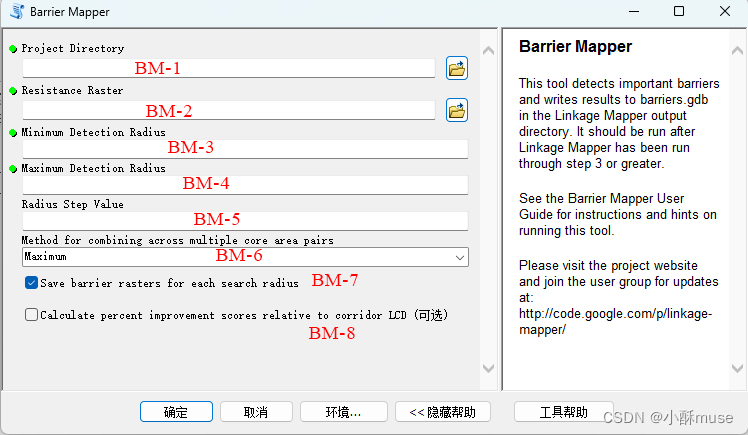
BM-1?:?Project?Directory,??即?项目文件夹,必须与上一步(构建网络)**
BM-2?:?Resistance?Raster,?即阻力面,必须与上一步(构建网络)**
BM-3?:?Minimum?Detection?Radius,?即最小探测半径
BM-4?:?Maximum?Detection?adius,?即最大探测半径
BM-5:?Radius?Step?Value,?即步长
知识点:障碍点是怎么识别的?
障碍点通过一个**窗口(下图所示3*3移动的方框),每次将**中心**值)替换成阻力面的**(或者是**,这点忘记了),然后计算对其所在廊道的改进分数,即为障碍点的数值,数值越大,障碍作用**。
最小探测半径:?为像元分辨率的**倍,一般为***倍(经验值),比如,像元大小为30,最小半径为***.
最大探测半径:?为像元分辨率的**倍,一般为***倍(经验值)
步长:??如60,90,120,150.....?这组等差数列的步长是30,数列中每个半径都会被***。?假设150是最大探测半径,60是最小半径,?(最大-最小)/步长?=?***
BM-6?:?Method?for?combining?across?multiple?core?area?pairs,即改进分数是按***还是***方式计算。数值会有**,但是位置***。
BM-7?:??Save?barrier?rasters?for?each?search?radius,即每个探测半径的检测结果都将被保存。
BM-8?:?Calculate?percent?improvement?scores?relative?to?corridor?LCD(可选),即?计算**(而不是改进**,改进分数的结果**会被**)
结果解析:
生成结果存放在barrier.gdb?或barrier_Sum.gdb,?分别表示用最大值和求和方法计算出的结果。
几个区别:
BarrierCenter:?计算的是移动搜索窗口中心像元的***
BarrierCircles?:计算的是**移动窗口所有像元的的**
Sum:?对所有廊道**
Pct?:计算的是改**
Radx:?半径为x的结果
RadXToYStepZ?:?从最小半径x到最大半径y,步长为z的所有结果***。
如何使用结果:
尽管生成数十种结果,但是*****,?只是数值上有些许变化。
规律如下:******。
所以选择一个合适的结果,确定一个*******的区域为障碍点区域吧。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2024年美赛数学建模思路 - 案例:感知机原理剖析及实现
- 【delphi11】delphi进阶【十、性能优化建议】
- SLB、DMZ、Nginx、Ingress、Gateway、Kibana和Grafana
- 信息安全导论参考答案之李冬冬 主编
- 一篇文章掌握WebService服务、工作原理、核心组件、主流框架
- 统信UOS操作系统上扩容数据盘
- 低代码平台:明年IT规划的关键
- Py之jupyter_client:jupyter_client的简介、安装、使用方法之详细攻略
- Java学习手册——第六篇输入输出
- HALCON&VS .net混合编程案例【02】:检测芯片的管脚间距