机器人创新实验室任务三参考文档
一、JAVA环境配置
需要在Linux里面下载并且安装java。
sudo apt-get install openjdk-17-jre-headless
打开终端并且运行指令,用apt下载安装java。官方用的好像是java11,我安装的是java17。
如果无法定位软件安装包,可以试试更新一下
sudo apt-get update
安装之后可以在终端输入指令验证是否安装成功
java -version
如果输出的是java版本,这就意味着安装成功。
二、代码下载
上面已经将代码运行成功。或者也可以在终端用git下载代码。
如果没有git可以在终端中输入指令安装
sudo apt-get install git
用git下载代码的方法如下
git clone https://github.com/roborescue/adf-sample-agent-java.git
?
git clone git@github.com:roborescue/rcrs-server.git
分别下载的是客户端和服务器两个工程项目。
三、编译项目
当代码下载好后,在两个工程所在的文件夹里面分别打开终端
1.服务器端编译
在服务器端的终端依次输入指令
cd rcrs-server
./gradlew completeBuild
先进入到工程的文件夹里面,然后全编译
注:这里需要工具gradle,得安装一下,可以用指令
sudo apt install gradle
2。客户端编译
在客户端的终端依次输入指令
cd adf-sample-agent-java
?
./gradlew clean
?
./gradlew build
打开工程文件并编译。
注:代码编译过之后,如果没有做修改,后面的运行可以不用再重新编译。
编译过后,都会有一个绿色的successful 。
四、运行项目
服务器端依次输入指令
?cd scripts
?
./start.sh -m ../maps/test/map -c ../maps/test/config
上面test是测试地图,智能体数量并不多,可以修改为kobe、berlin等地图,这个可以到文件中查看。
这时服务器已经准备好了,同时也会打开图形化界面
服务端准备好后,在刚刚已经打开的客户端的终端中输入指令
./launch.sh
可以看到对于lanuch脚本,我们可以进行很多操作
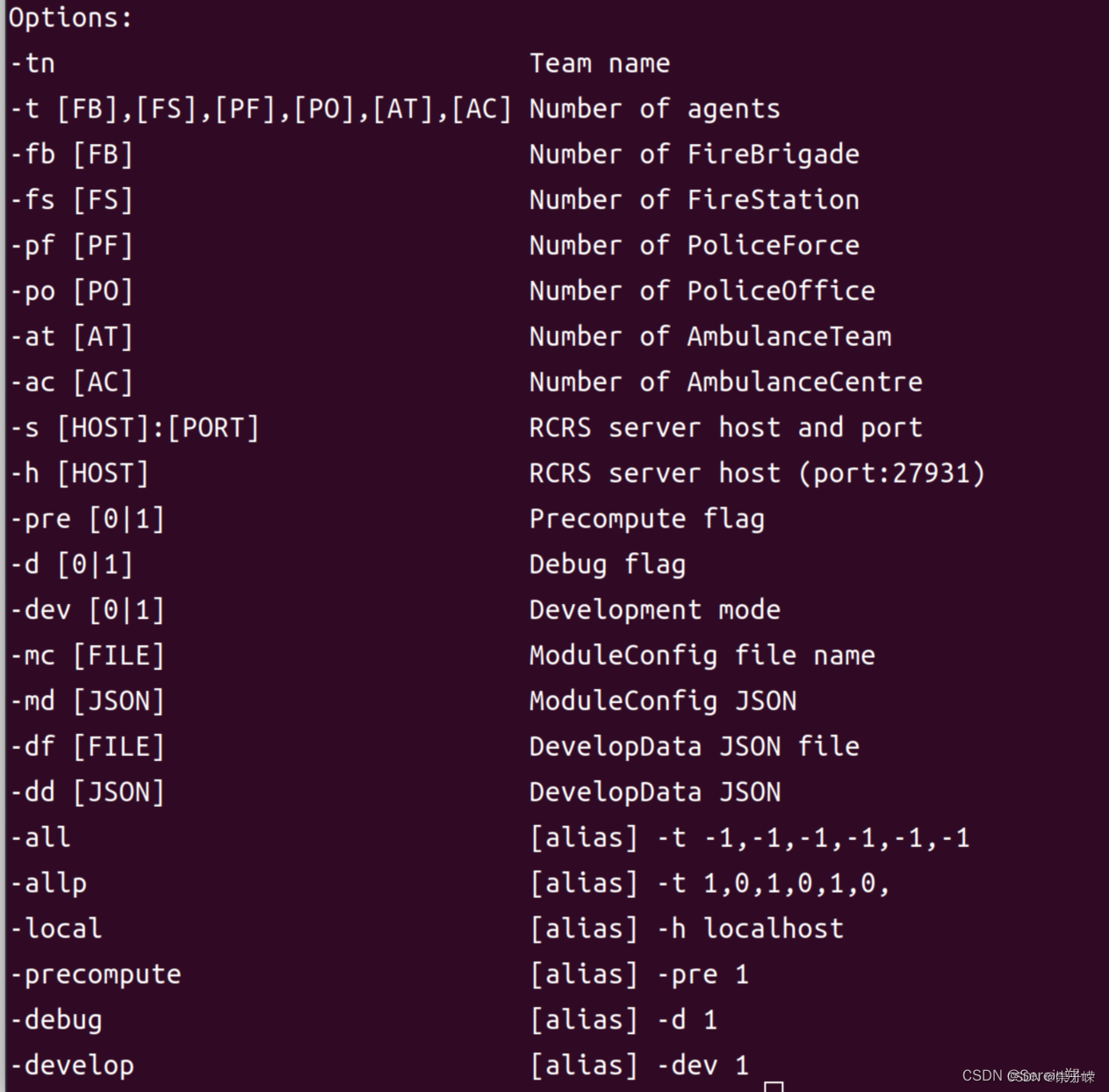
?我们选择全部运行,即输入下面的这个指令
./launch.sh -all
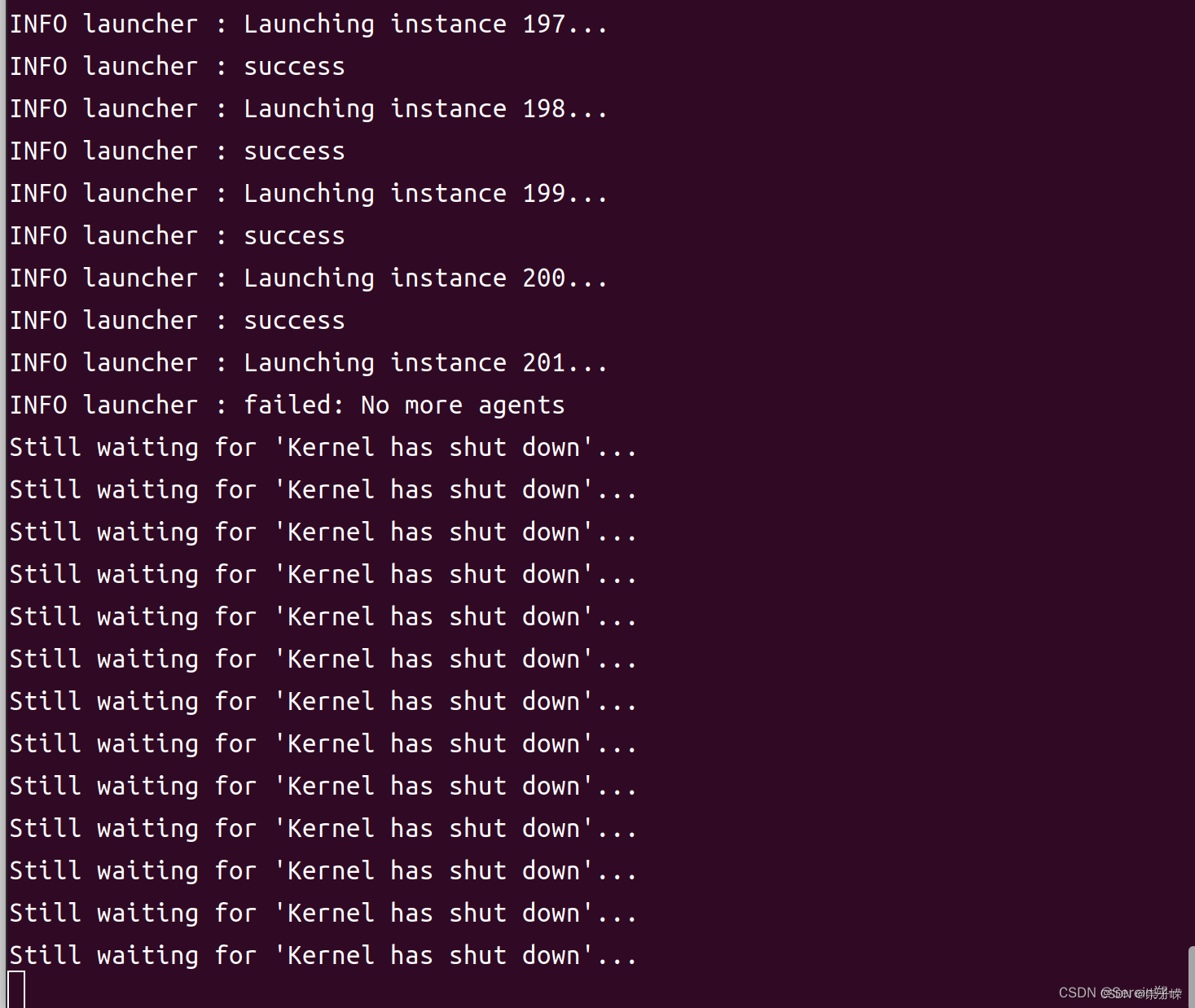
就会启动整个项目,等待项目中所有智能体的连接。
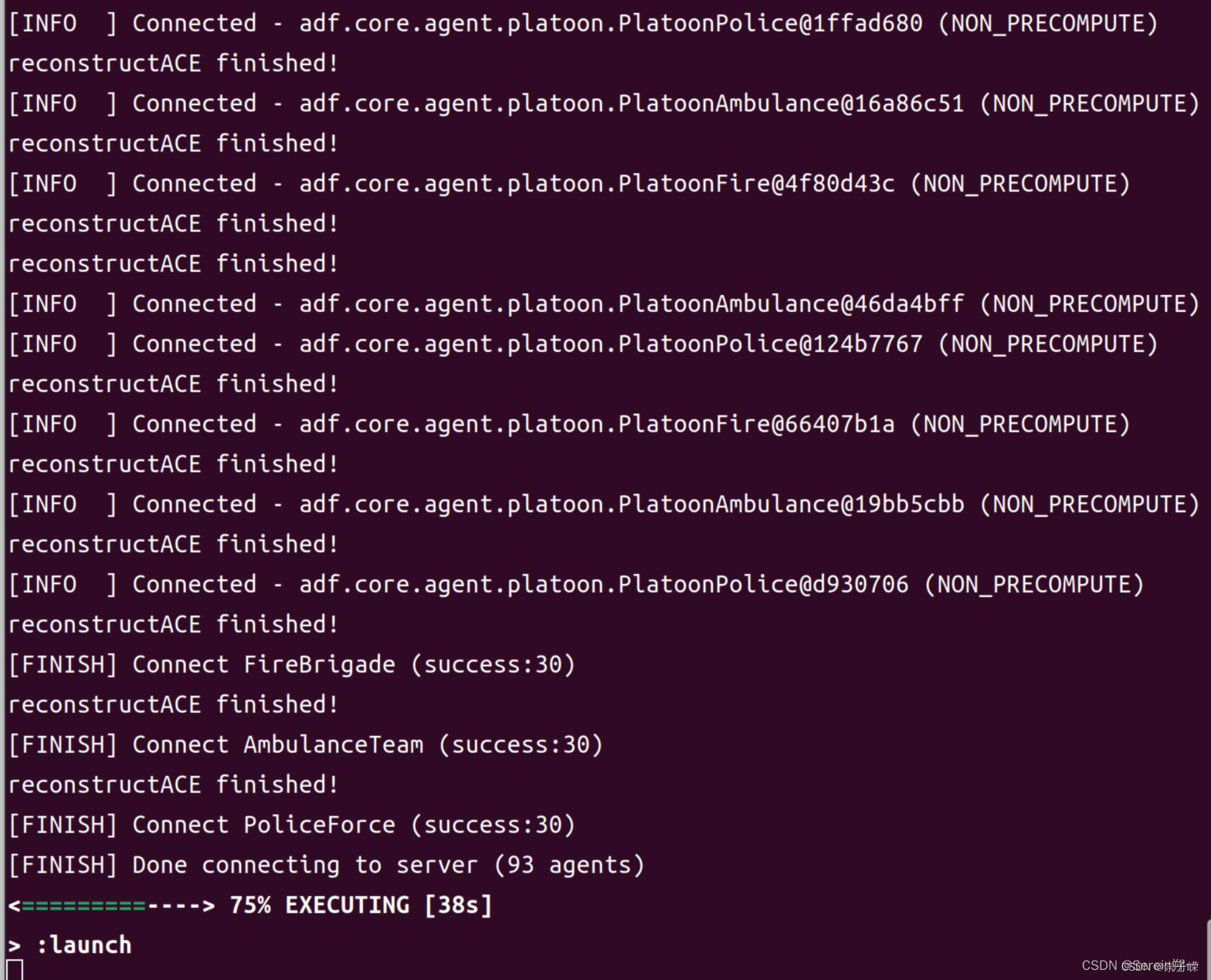
再非预计算模式下(NON_PRECOMPUTE),进度条只能到75%,当出现Done connecting to server,就意味着所有的智能体都挂载到服务端了。
这是整个项目都已经准备就绪,点击GUI界面的RUN就可以看到智能体开始运动,跑图开始

?在地图上也出现了很多黑色的障碍。
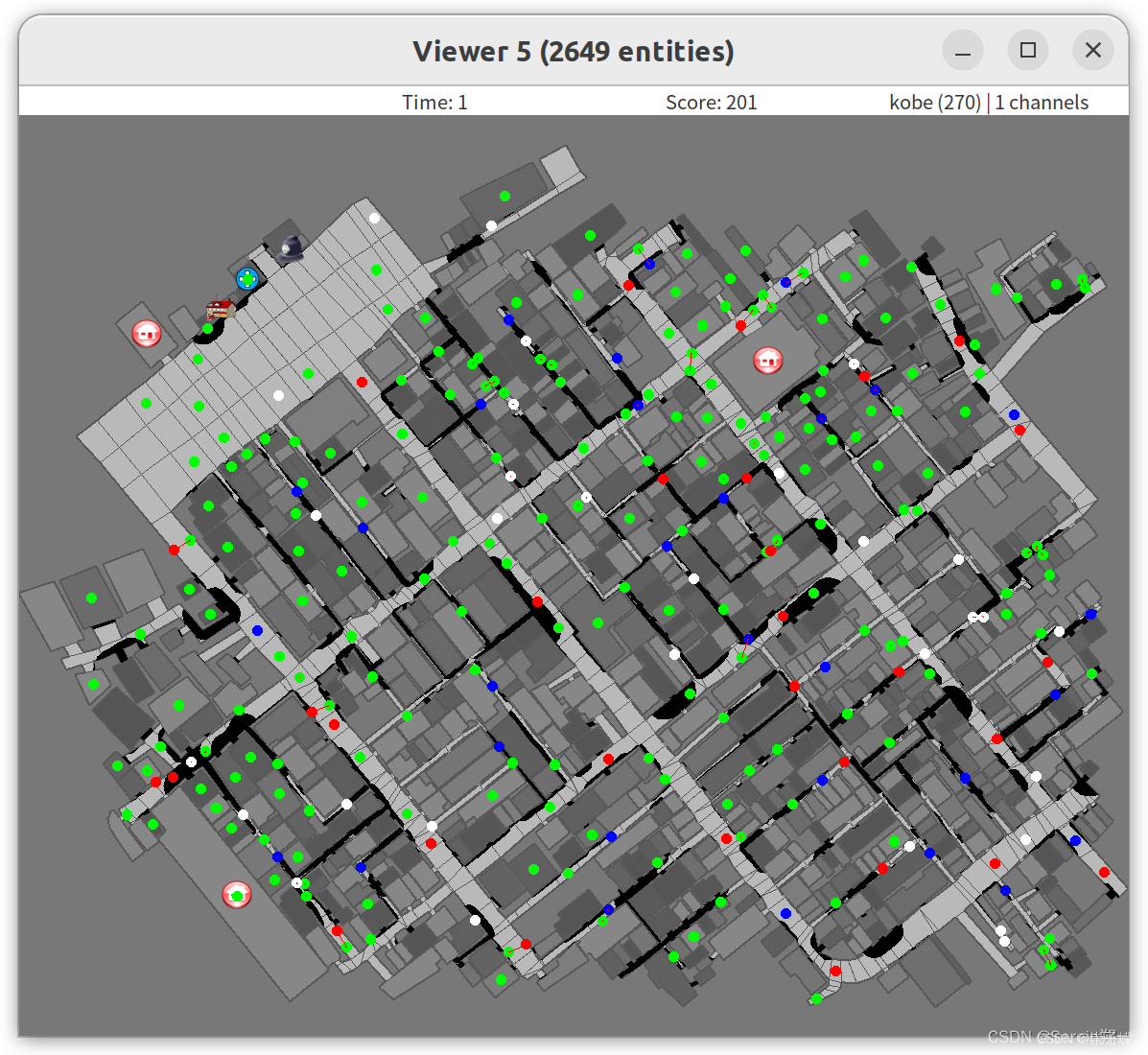
如果出现了这个界面,并且不同颜色的智能体也在运动,恭喜你考核成功。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 鸿蒙原生应用/元服务开发-Stage模型能力接口(十)上
- 前端对接 —— 周末
- C Primer Plus (中文版)第12章编程练习 参考答案(仅供参考~)
- Git远程操作
- 室内定位相关中文期刊/学报笔记
- 程序员副业之AI文库项目(超详细完整全流程)
- 大创项目推荐 深度学习中文汉字识别
- IP地址冲突警告!你的网络正在受到威胁
- docker compose部署wordpress
- 2024阿里云服务器ECS实例全方位介绍_优缺点大全