【Proteus仿真】【STM32单片机】超声波测距系统
发布时间:2024年01月05日
一、功能简介
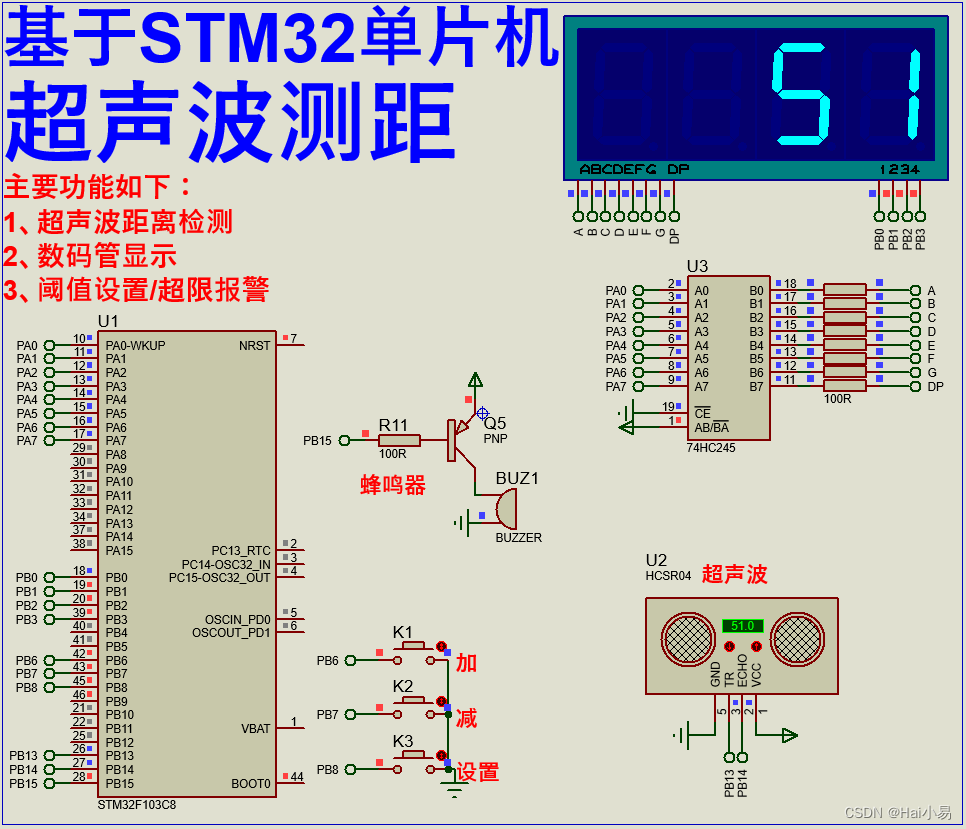
本项目使用Proteus8仿真STM32单片机控制器,使用动态数码管、按键、HCSR04超声波、蜂鸣器模块等。
主要功能:
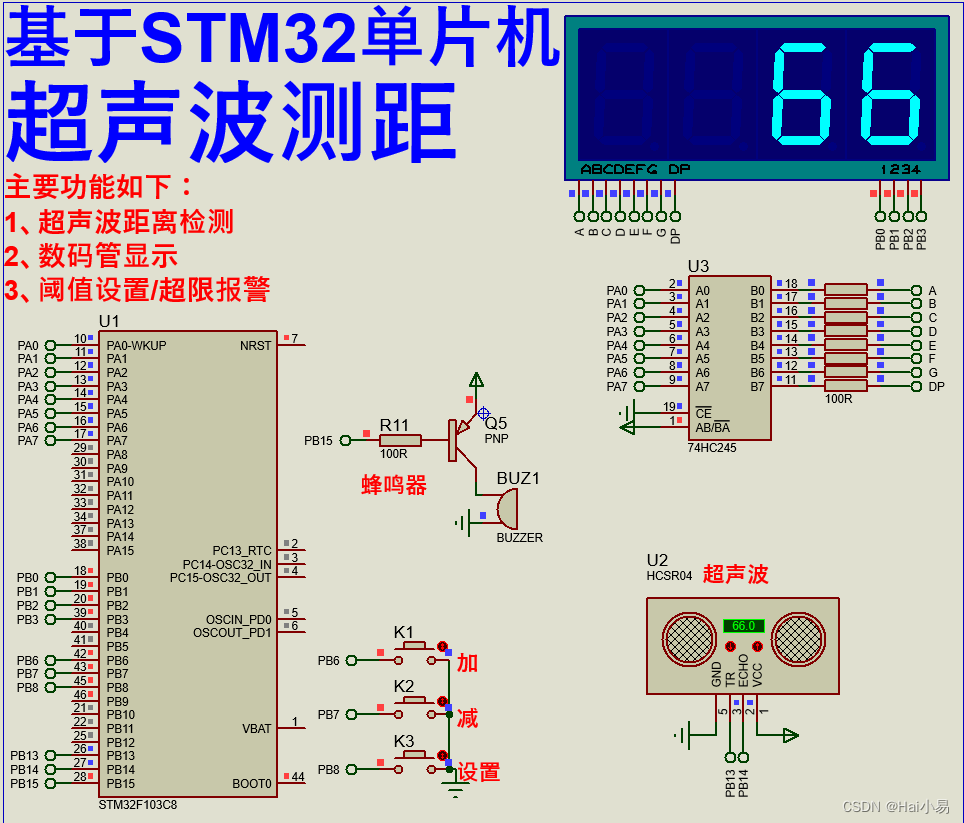
系统运行后,数码管显示超声波检测距离,当检测距离小于阈值,默认50CM;蜂鸣器报警,且距离越近报警频率越快;
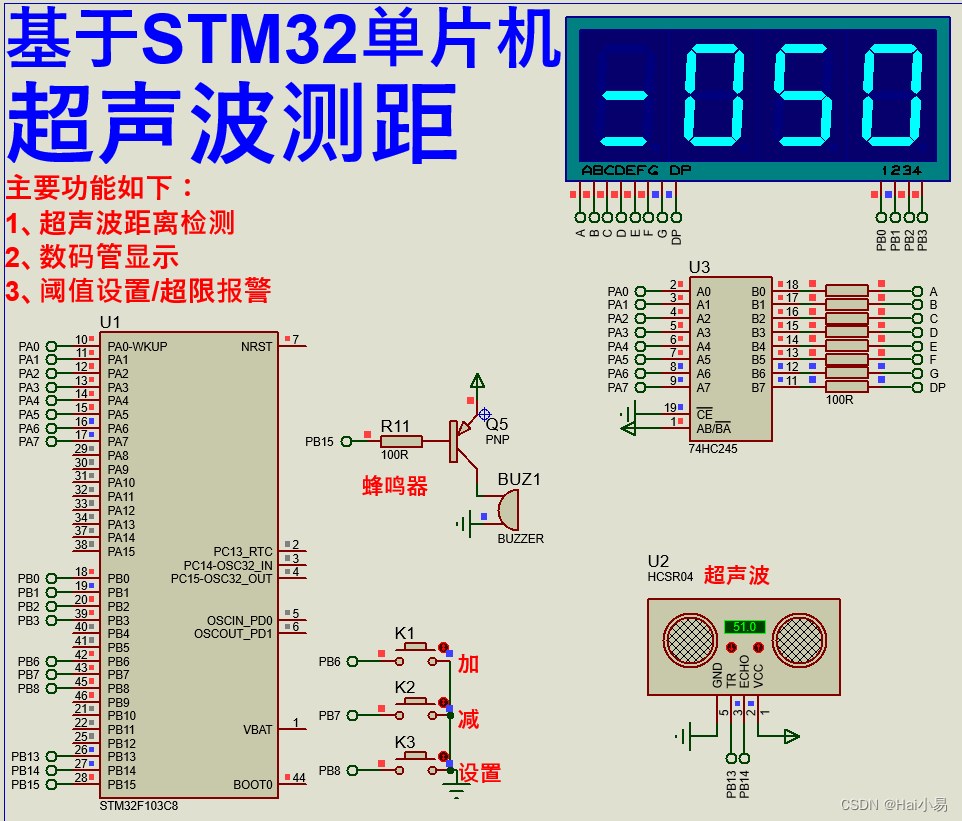
可通过按键K3进入阈值设置模式,K1和K2调节阈值。
二、软件设计
/*
作者:嗨小易(QQ技术交流群:570487280)
*/
//系统数据显示
void sys_data_show(void)
{
u8 buf[4];
while(1)
{
//正常模式显示
if(sys_ctrl.mode==0)
{
buf[0]=0;
if(sys_ctrl.dis>=100)
{
buf[1]=gsmg_code[sys_ctrl.dis/100];
buf[2]=gsmg_code[sys_ctrl.dis%100/10];
buf[3]=gsmg_code[sys_ctrl.dis%100%10];
}
else if(sys_ctrl.dis>=10)
{
buf[1]=0;
buf[2]=gsmg_code[sys_ctrl.dis%100/10];
buf[3]=gsmg_code[sys_ctrl.dis%100%10];
}
else if(sys_ctrl.dis>=0)
{
buf[1]=0;
buf[2]=0;
buf[3]=gsmg_code[sys_ctrl.dis%100%10];
}
}
//阈值设置显示
else
{
buf[0]=0x48;
buf[1]=gsmg_code[sys_ctrl.disl/100];
buf[2]=gsmg_code[sys_ctrl.disl%100/10];
buf[3]=gsmg_code[sys_ctrl.disl%100%10];
}
smg_display(buf,1);
break;
}
}
//系统数据设置
void sys_data_set(void)
{
u8 key=0;
key=key_scan(0);
//设置
if(key==KEY3_PRESS)
{
sys_ctrl.mode=!sys_ctrl.mode;
}
//阈值设置模式
if(sys_ctrl.mode==1)
{
//加
if(key==KEY1_PRESS)
{
sys_ctrl.disl++;
if(sys_ctrl.disl>500)sys_ctrl.disl=0;
}
//减
else if(key==KEY2_PRESS)
{
sys_ctrl.disl--;
if(sys_ctrl.disl<0)sys_ctrl.disl=500;
}
}
}
//系统功能控制
void sys_fun_ctrl(void)
{
static u16 i=0;
//正常模式
if(sys_ctrl.mode==0)
{
//如果检测距离小于阈值,蜂鸣器报警
if(sys_ctrl.dis<sys_ctrl.disl)
{
i++;
if(i<sys_ctrl.dis)
BEEP=0;
else if(i<2*sys_ctrl.dis)
BEEP=1;
else i=0;
}
else
{
i=0;
BEEP=1;
}
}
}
三、实验现象
B站演示视频:https://space.bilibili.com/444388619
联系作者
视频地址:https://space.bilibili.com/444388619/video
专注于51单片机、STM32、国产32、DSP、Proteus、arduino、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。
文章来源:https://blog.csdn.net/Hello_Muyi/article/details/135377726
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 微店商品详情API(micro.item_get)的数据分析和挖掘
- 并发编程之CAS&Atomic原子操作
- (21)Linux的文件描述符&&输出重定向
- 《机器学习》客户流失判断-python实现
- Ubuntu18.04使用SCP协议进行文件传输
- 基于javaWeb的長安智慧医疗管理系统设计与实现论文
- 一起读书——债券及债券基金投资从入门到精通
- 排序算法——基数排序
- Tarjan-eDcc,边双连通分量问题,eDcc缩点问题
- 2024最惨手游,开服就遭黑客组织勒索