二十、中断管理
1、前言
(1)在RTOS中,需要应对各类事件。这些事件很多时候是通过硬件中断产生,怎么处理中断呢?假设当前系统正在运行Task1时,用户按下了按键,触发了按键中断。这个中断的处理流程如下:
CPU跳到固定地址去执行代码,这个固定地址被称为中断向量,这个跳转是硬件实现的,执行代码做了如下内容:
- 保存现场:Task1被打断,需要先保存Task1的运行环境,比如各类寄存器的值。
- 分辨中断、调用处理函数(这个函数就被称为ISR,interrupt service routine)
- 恢复现场:继续运行Task1,或者运行其他优先级更高的任务
(2)需要注意的是,ISR是在内核中被调用的,ISR执行过程中,用户的任务无法执行。ISR要尽量快,否则:
- 其他低优先级的中断无法被处理:实时性无法保证。
- 用户任务无法被执行:系统显得很卡顿。
(3)如果这个硬件中断的处理,就是非常耗费时间呢?对于这类中断的处理就要分为2部分:
- ISR:尽快做些清理、记录工作,然后触发某个任务。
- 任务:更复杂的事情放在任务中处理。
- 所以:需要ISR和任务之间进行通信。
(4)要在FreeRTOS中熟练使用中断,有几个原则需要先说明:
- FreeRTOS把任务认为是硬件无关的,任务的优先级由程序员决定,任务何时运行由调度器决定。
- ISR虽然也是使用软件实现的,但是它被认为是硬件特性的一部分,因为它跟硬件密切相关。
- 何时执行?由硬件决定
- 哪个ISR被执行?由硬件决定
- ISR的优先级高于任务:即使是优先级最低的中断,它的优先级也高于任务。任务只有在没有中断的情况下,才能执行。
(5)本文涉及内容:
- FreeRTOS的哪些API函数能在ISR中使用。
- 怎么把中断的处理分为两部分:ISR、任务。
- ISR和任务之间的通信。
2、两套API函数
2.1、为什么需要两套API
(1)在任务函数中,我们可以调用给类API函数,比如队列操作函数:xQueueSendToBack。但是在ISR中使用这个函数会导致问题,应该使用另一个函数:xQueueSendToBackFromISR,它的函数名含有后缀"FromISR",表示"从ISR中给队列发送数据"。
(2)FreeRTOS中很多API函数都有两套:一套在任务中使用,另一套在ISR中使用。后者的函数名含有"FromISR"后缀。
(3)为什么要引入两套API函数?
- 很多API函数会导致任务进入阻塞状态:
- 运行这个函数的任务进入阻塞状态
- 比如写队列时,如果队列已满,可以进入阻塞状态等待一会
- ISR调用API函数时,ISR不是“任务”,ISR不能进入阻塞状态
- 所以,在任务中、在ISR中,这些函数的功能是有差异的
(4)为什么不适用同一套函数,比如在函数里面分辨当前调用者是任务还是ISR呢?示例代码如下:
BaseType_t xQueueSend(...)
{
if (is_in_isr())
{
/* 把数据放入队列 */
/* 不管是否成功都直接返回 */
} else /* 在任务中 */
{
/* 把数据放入队列 */
/* 不成功就等待一会再重试 */
}
}(5)FreeRTOS使用两套函数,而不是使用一套函数,是因为有如下好处:
- 使用同一套函数的话,需要增加额外的判断代码、增加额外的分支,使得函数更长、更复杂、难以测试。
- 在任务、ISR中调用时,需要的参数不一样,比如:
- 在任务中调用:需要指定超时时间,表示如果不成功就阻塞一会
- 在ISR中调用:不需要指定超时时间,无论是否成功都要即刻返回
- 如果强行把两套函数揉在一起,会导致参数臃肿、无效
- 移植FreeRTOS时,还需要提供监测上下文的函数,比如 is_in_isr()
- 有些处理器架构没有办法轻易分辨当前是处于任务中,还是处于ISR中,就需要额外添加更多、更复杂的代码。
(6)使用两套函数可以让程序更高效,但是也有一些缺点,比如你要使用第三方库函数时,即会在任务中调用它,也会在ISR总调用它。这个第三方库函数用到了FreeRTOS的API函数,你无法修改库函数。这个问题可以解决:
- 把中断的处理推迟到任务中进行(Defer interrupt processing),在任务中调用库函数
- 尝试在库函数中使用"FromISR"函数:
- 在任务中、在ISR中都可以调用"FromISR"函数
- 反过来就不行,非FromISR函数无法在ISR中使用
- 第三方库函数也许会提供OS抽象层,自行判断当前环境是在任务还是在ISR中,分别调用不同的函数
2.2、两套API函数列表
| 类型 | 在任务中 | 在ISR中 |
|---|---|---|
| 队列(queue) | xQueueSendToBack | xQueueSendToBackFromISR |
| xQueueSendToFront | xQueueSendToFrontFromISR | |
| xQueueReceive | xQueueReceiveFromISR | |
| xQueueOverwrite | xQueueOverwriteFromISR | |
| xQueuePeek | xQueuePeekFromISR | |
| 信号量(semaphore) | xSemaphoreGive | xSemaphoreGiveFromISR |
| xSemaphoreTake | xSemaphoreTakeFromISR | |
| 事件组(event group) | xEventGroupSetBits | xEventGroupSetBitsFromISR |
| xEventGroupGetBits | xEventGroupGetBitsFromISR | |
| 任务通知(task notification) | xTaskNotifyGive | vTaskNotifyGiveFromISR |
| xTaskNotify | xTaskNotifyFromISR | |
| 软件定时器(software timer) | xTimerStart | xTimerStartFromISR |
| xTimerStop | xTimerStopFromISR | |
| xTimerReset | xTimerResetFromISR | |
| xTimerChangePeriod | xTimerChangePeriodFromISR |
2.3、xHigherPriorityTaskWoken参数
(1)xHigherPriorityTaskWoken的含义是:是否有更高优先级的任务被唤醒了。如果为pdTRUE,则意味着后面要进行任务切换。
(2)以写队列为例,任务A调用 xQueueSendToBack() 写队列,有几种情况发生:
- 队列满了,任务A阻塞等待,另一个任务B运行。
- 队列没满,任务A成功写入队列,但是它导致另一个任务B被唤醒,任务B的优先级更高:任务B先运行。
- 任务没满,任务A成功写入队列,即刻返回。
(3)可以看到,在任务中调用API函数可能导致任务阻塞、任务切换,这叫做"context switch",上下文切换。这个函数可能很长时间才返回,在函数的内部实现了任务切换。
(4)xQueueSendToBackFromISR() 函数也可能导致任务切换,但是不会在函数内部进行切换,而是返回一个参数:表示是否需要切换,函数原型与用法如下:
/*
* 往队列尾部写入数据,此函数可以在中断函数中使用,不可阻塞
*/
BaseType_t xQueueSendToBackFromISR(
QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);
/* 用法示例 */
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
xQueueSendToBackFromISR(xQueue, pvItemToQueue, &xHigherPriorityTaskWoken);
if (xHigherPriorityTaskWoken == pdTRUE)
{
/* 任务切换 */
}(5)pxHigherPriorityTaskWoken参数,就是用来保存函数的结果:是否需要切换任务:
- *pxHigherPriorityTaskWoken等于pdTRUE:函数的操作导致更高优先级的任务就绪了,ISR应该进行任务切换
- *pxHigherPriorityTaskWoken等于pdFALSE:没有进行任务切换的必要
(6)为什么不在"FromISR"函数内部进行任务切换,而只是标记一下而已呢?为了效率!示例代码如下:
void XXX_ISR()
{
int i;
for (i = 0; i < N; i++)
{
xQueueSendToBackFromISR(...); /* 被多次调用 */
}
}(7)ISR中有可能多次调用"FromISR"函数,如果在"FromISR"内部进行任务切换,会浪费时间。解决方法是:
- 在"FromISR"中标记是否需要切换
- 在ISR返回之前再进行任务切换
- 示例代码如下
void XXX_ISR()
{
int i;
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
for (i = 0; i < N; i++)
{
xQueueSendToBackFromISR(..., &xHigherPriorityTaskWoken); /* 被多次调用 */
}
/* 最后再决定是否进行任务切换 */
if (xHigherPriorityTaskWoken == pdTRUE)
{
/* 任务切换 */
}
}(8)上述的例子很常见,比如UART中断:在UART的ISR中读取多个字符,发现收到回车符时才进行任务切换。
(9)在ISR中调用API时不进行任务切换,而只是在"xHigherPriorityTaskWoken"中标记一下,除了效率,还有多种好处:
- 效率高:避免不必要的任务切换
- 让ISR更可控:中断随机产生,在API中进行任务切换的话,可能导致问题更复杂
- 可移植性
- 在Tick中断中,调用 vApplicationTickHook() :它运行与ISR,只能使用"FromISR"的函数
(10)使用"FromISR"函数时,如果不想使用xHigherPriorityTaskWoken参数,可以设置为NULL。
2.4、怎么切换任务
(1)FreeRTOS的ISR函数中,使用两个宏进行任务切换:
portEND_SWITCHING_ISR( xHigherPriorityTaskWoken );
或
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );(2)这两个宏做的事情是完全一样的,在老版本的FreeRTOS中,
- portEND_SWITCHING_ISR 使用汇编实现
- portYIELD_FROM_ISR 使用C语言实现
(3)新版本都统一使用 portYIELD_FROM_ISR 。
(4)使用示例如下:
void XXX_ISR()
{
int i;
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
for (i = 0; i < N; i++)
{
xQueueSendToBackFromISR(..., &xHigherPriorityTaskWoken); /* 被多次调用 */
}
/* 最后再决定是否进行任务切换
* xHigherPriorityTaskWoken为pdTRUE时才切换
*/
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}3、中断的延时处理
(1)前面讲过,ISR要尽量快,否则:
- 其他低优先级的中断无法被处理:实时性无法保证
- 用户任务无法被执行:系统显得很卡顿
- 如果运行中断嵌套,这会更复杂,ISR越快执行越有助于中断嵌套
(2)如果这个硬件中断的处理,就是非常耗费时间呢?对于这类中断的处理就要分为2部分:
- ISR:尽快做些清理、记录工作,然后触发某个任务
- 任务:更复杂的事情放在任务中处理
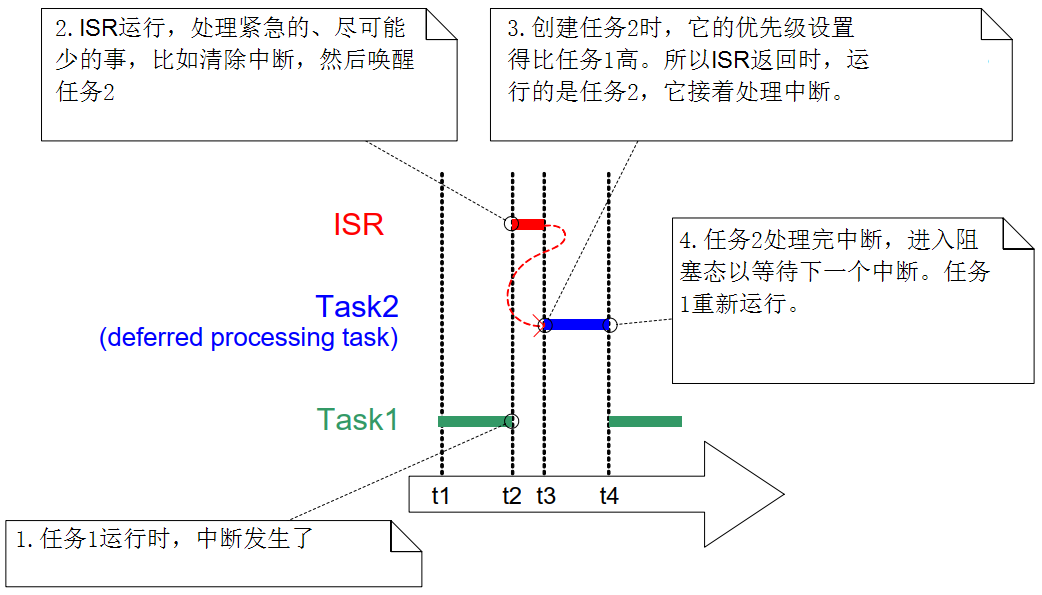
(3)这种处理方式叫"中断的延迟处理"(Deferring interrupt processing),处理流程如下图所示:
- t1:任务1运行,任务2阻塞
- t2:发生中断,该中断的ISR函数被执行,任务1被打断;ISR函数要快速地运行,它做一些必要的操作(比如清除中断),然后唤醒任务2
- t3:在创建任务时设置任务2的优先级比任务1高(这取决于设计者),所以ISR返回后,运行的是任务2,它要完成中断的处理。任务2就被称为"deferred processing task",中断的延迟处理任务。
- t4:任务2处理完中断后,进入阻塞态以等待下一个中断,任务1重新运行
4、中断与任务间的通信
(1)队列、信号量、互斥量、事件组、任务通知等等方法,都可以进行中断与任务间的通信。
(2)要注意的是,在ISR中使用的函数要有"FromISR"后缀。
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【USTC】verilog 习题练习 26-30
- KBU808-ASEMI适配高端电源KBU808
- 实战SRC | api接口未授权 + 越权漏洞
- 密码输入时的隐藏显示和显示
- 文章解读与仿真程序复现思路——电力自动化设备EI\CSCD\北大核心《面向平稳氢气需求的综合制氢系统鲁棒优化配置方法》
- 前列腺在哪?3D动画演示人体前列腺特写视频素材下载
- 图像分割实战-系列教程18:MaskRCNN项目介绍与配置
- ssh远程登录协议
- 八大排序算法@直接插入排序(C语言版本)
- 多数据源分布式事务