使用Allan_Variance_ROS功能包进行IMU标定
前言
以realsense D455相机内置IMU的标定来介绍Allan_Variance_ROS功能包进行IMU标定的整体流程以及实现效果,提供若干可能遇到问题的解决方案。
?一、功能包源码编译
功能包源码暂时没有支持ROS2,需要在ROS1框架、Ubuntu20.04环境下进行编译。
在工作空间/src目录下克隆项目源码:
git clone https://github.com/ori-drs/allan_variance_ros.git在工作空间目录下进行编译:
catkin_make二、IMU数据包准备
以Realsense D455相机内置IMU为例:
在工作空间/src目录下安装Realsense D455的ROS1框架下SDK:
git clone -b ros1-legacy --single-branch https://github.com/IntelRealSense/realsense-ros.git
返回工作空间目录下编译:
catkin_make修改rs_camera.launch文件参数:
?1.修改IMU模式为“copy”,打开同步器,此时陀螺仪和加速度计数据将统一于话题“/camera/imu”中发布。
<arg name="unite_imu_method" default="copy"/>
<arg name="enable_sync" default="true"/>2.打开陀螺仪和加速度计,设置输出频率为200。
<arg name="gyro_fps" default="200"/>
<arg name="accel_fps" default="200"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>3.启动相机
roslaunch realsense2_camera rs_camera.launch
4.查看话题输出是否正确
rostopic list看到话题“/camera/imu” 即可进行下一步。
5.录制数据包
rosbag record --duration=3h -O bag_name.bag /camera/imu至少录制三个小时以上,时间越长标定结果越准确,记录数据期间要把IMU静置在平整的桌面上。
--duration参数可以修改录制时间,-O为数据包的名称,可以自定义,尽量以.bag为文件后缀。
?三、IMU标定
1.按时间戳重新组织 ROS 消息
rosrun allan_variance_ros cookbag.py --input original_rosbag --output cooked_rosbag?--input参数:原始数据包的路径
--output参数:时间戳排序后的数据包名称,这里一定要以.bag结尾进行命名,否则会无法进行正常读取,无法输出.csv文件。
这是一个耗时操作,没有输出提示,大家耐心等待就好。完成后会在同级文件夹下生成对应文件。
2.运行Allan方差计算工具
rosrun allan_variance_ros allan_variance [path_to_folder_containing_bag] [path_to_config_file]?[path_to_folder_containing_bag]:时间戳排序后的数据包所在的文件夹路径,允许包含多个数据包。
[path_to_config_file]:配置文件的路径。
配置文件的写法:
config.yaml:
imu_topic: "/camera/imu"
imu_rate: 200
measure_rate: 200 # Rate to which imu data is subsampled
sequence_time: 12986 # 1 hour in secondsimu_topic:IMU输出的话题名称,以实际为准。
imu_rate、measure_rate:统一设置一个频率即可,按照硬件性能酌情处理。
sequence_time:数据包的序列长度。
用下列命令查看数据包序列长度(录制时间)
rosbag play --pause bag_name.bag下面是我的具体操作,Duration后的数字向下取整即可(不要超过),写入配置文件当中。

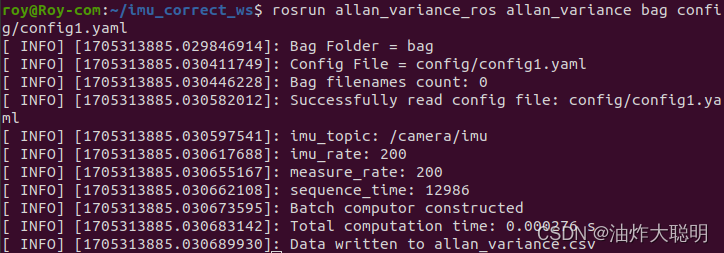
在第二步操作时可能出现以下问题,我们注意到Bag filename count: 0,也就是说没有读取到数据包,也不会有实际的allan_variance.csv输出,后续就会出现找不到allan_variance.csv的问题。
解决方案也非常简单,将数据包文件的后缀改成.bag即可,对应源码中对.bag文件的过滤。
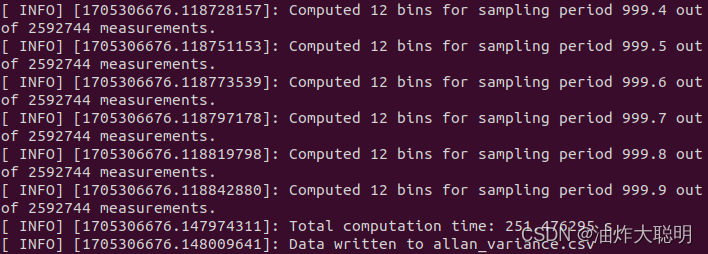
正常情况下是有中间状态输出的,用时也比较长。
3.可视化绘图并获取参数
rosrun allan_variance_ros analysis.py --data allan_variance.csv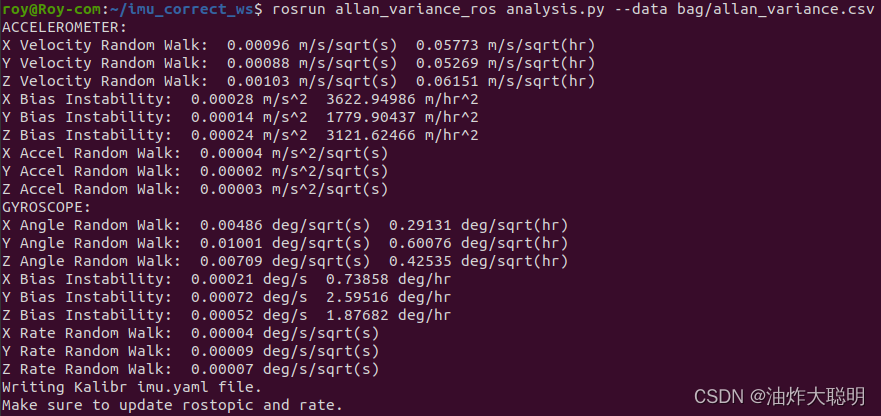
最后会在同级目录下生成校准文件imu.yaml和可视化曲线图。
下面是我的标定结果:

?这是生成的imu.yaml文件的内容,rostopic和update_rate按照实际修改即可使用。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 7-36 复数四则运算 分数 15
- Java Websocket发送文件给Vue客户端接收并上传,实现检测U盘插入并将指定文件上传到服务器功能
- 2024年【低压电工】试题及解析及低压电工模拟考试
- python爬虫进阶-每日一学(gif验证码识别)
- 基本的Dos命令
- 深度解读Java的继承和多态的特性
- 最新Win11系统怎么删除开机密码 Win11取消登录密码图文教程
- 解决java前台传递时间到后台相差8个小时的时区问题
- 分享几种msvcr120.dll丢失的解决方案,以及在修复过程中的注意事项
- Spring Integration接收TCP与UDP请求