ROS学习记录:用C++实现对wpr_simulation软件包中机器人的运动控制
发布时间:2023年12月31日
一、在工作空间下输入catkin_make进行编译
二、在工作空间中输入source ./devel/setup.bash后回车
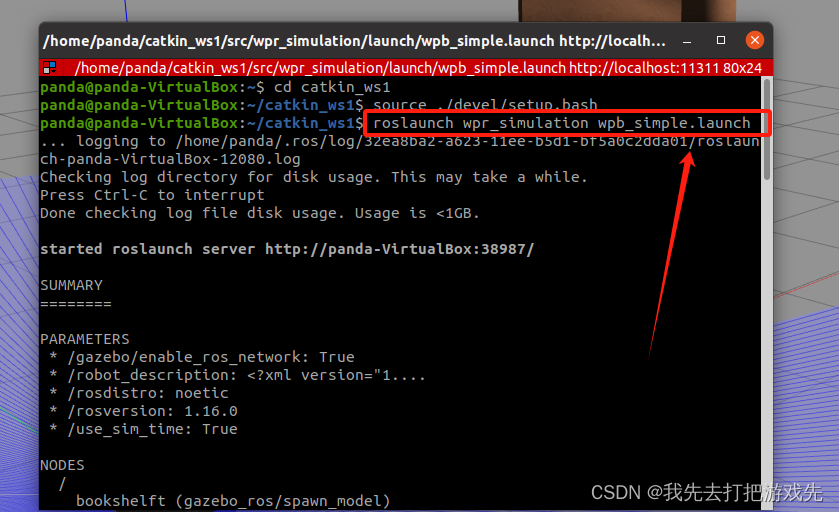
三、机器人的运动控制在wpr_simulation中有一个例子程序,在工作空间中输入:
roslaunch wpr_simulation wpb_simple.launch后回车
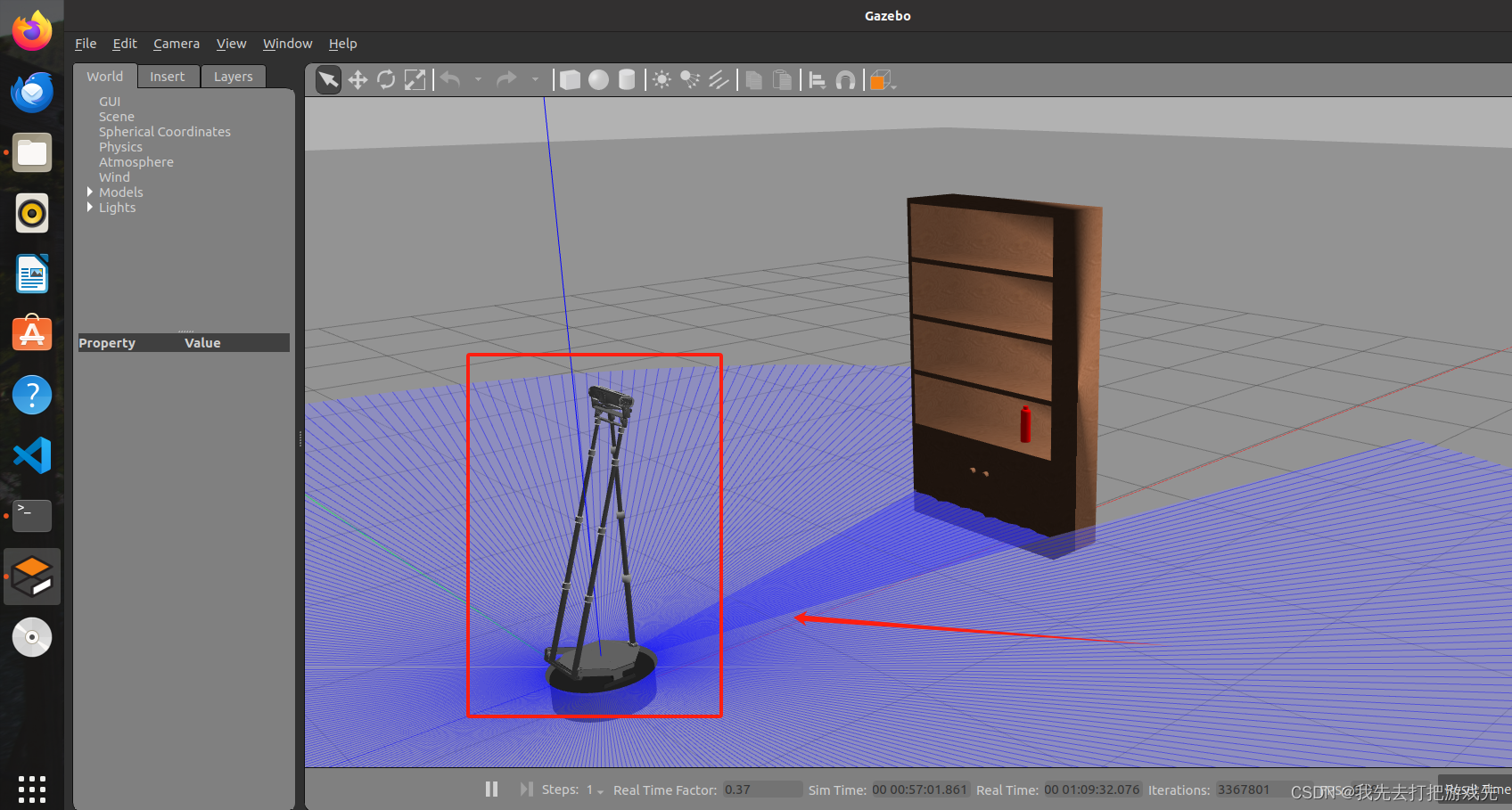
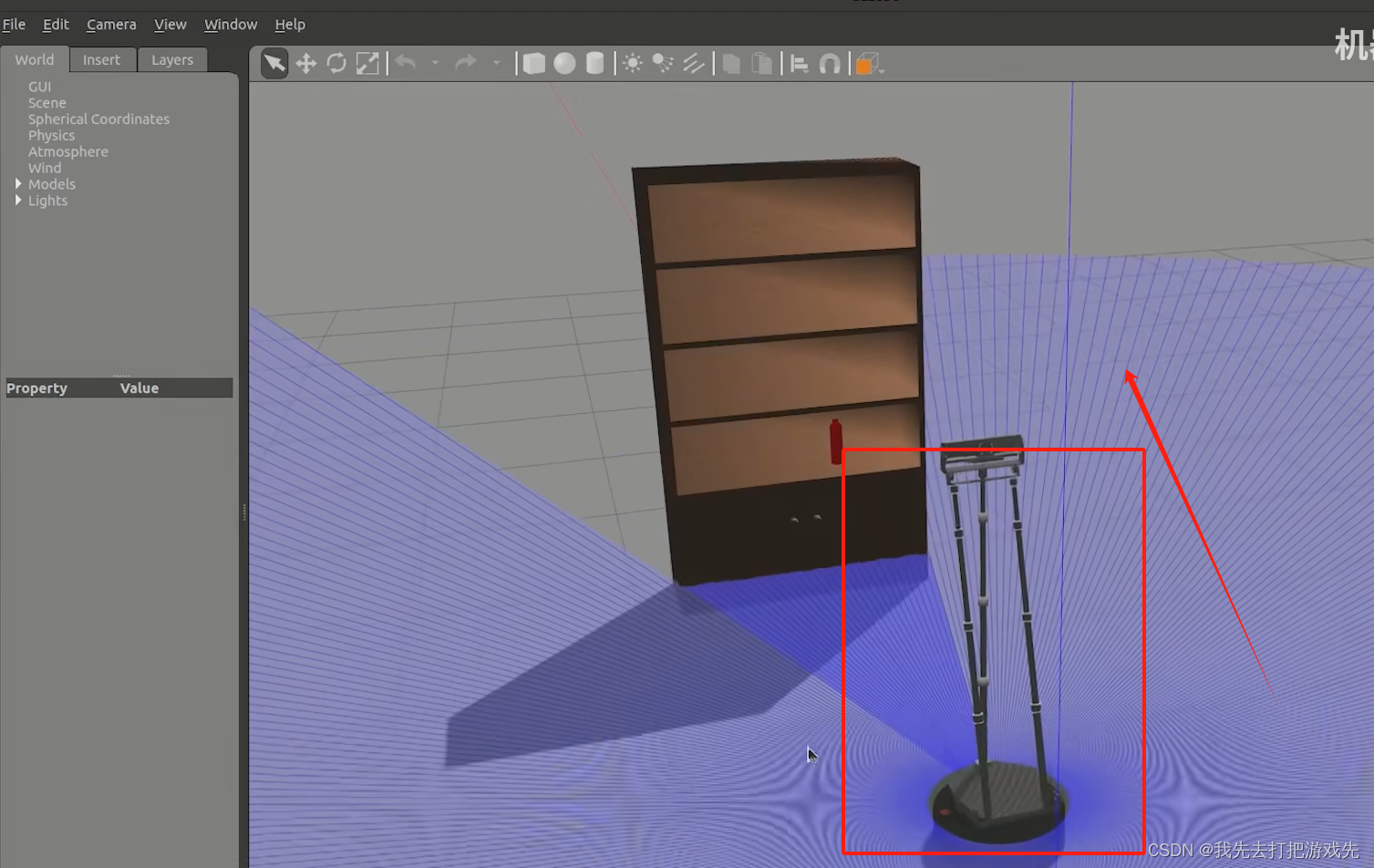
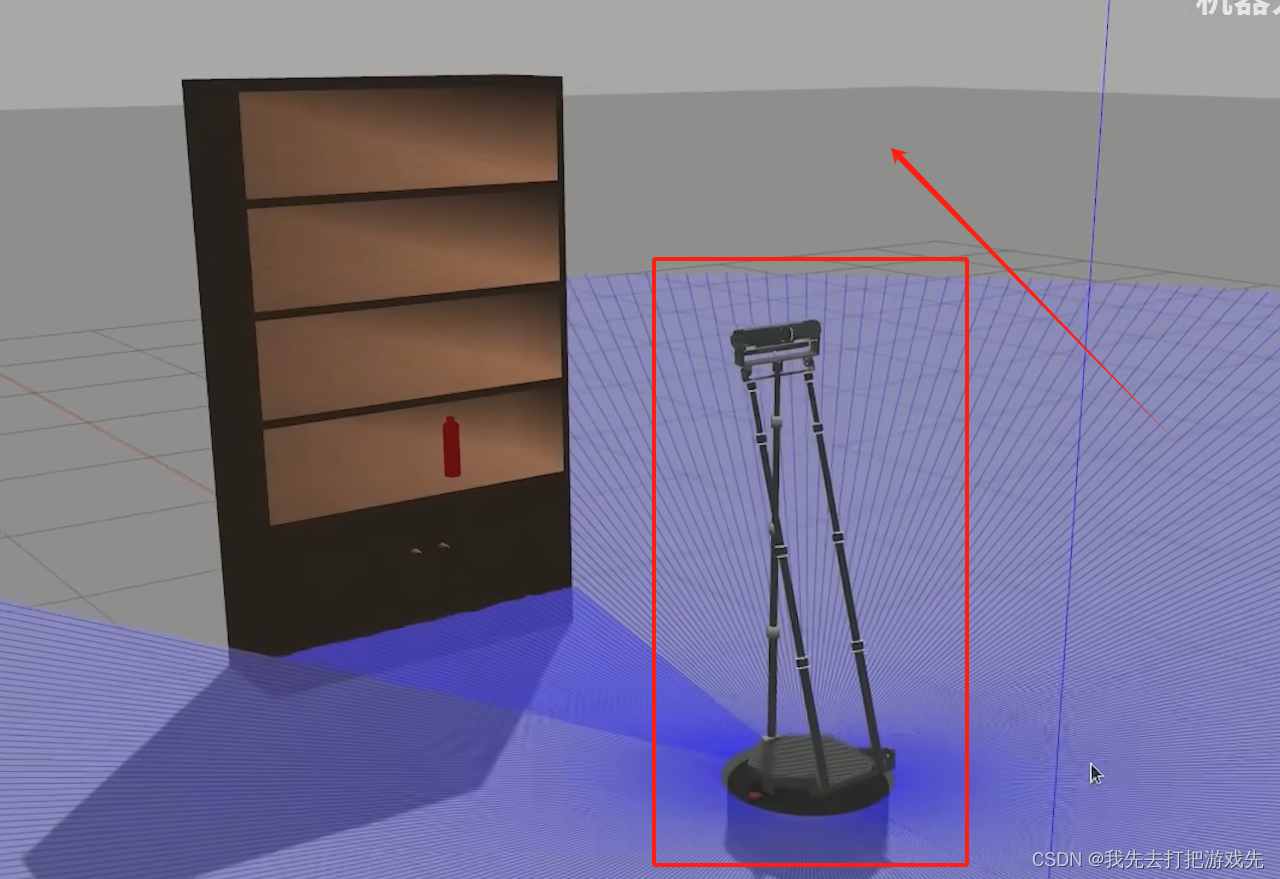
四、就会启动一个仿真环境,里面有一台ROS机器人,前面放置了一个衣柜
五、再开一个终端,输入rosrun wpr_simulation demo_vel_ctrl后回车,运行运动控制示例程序
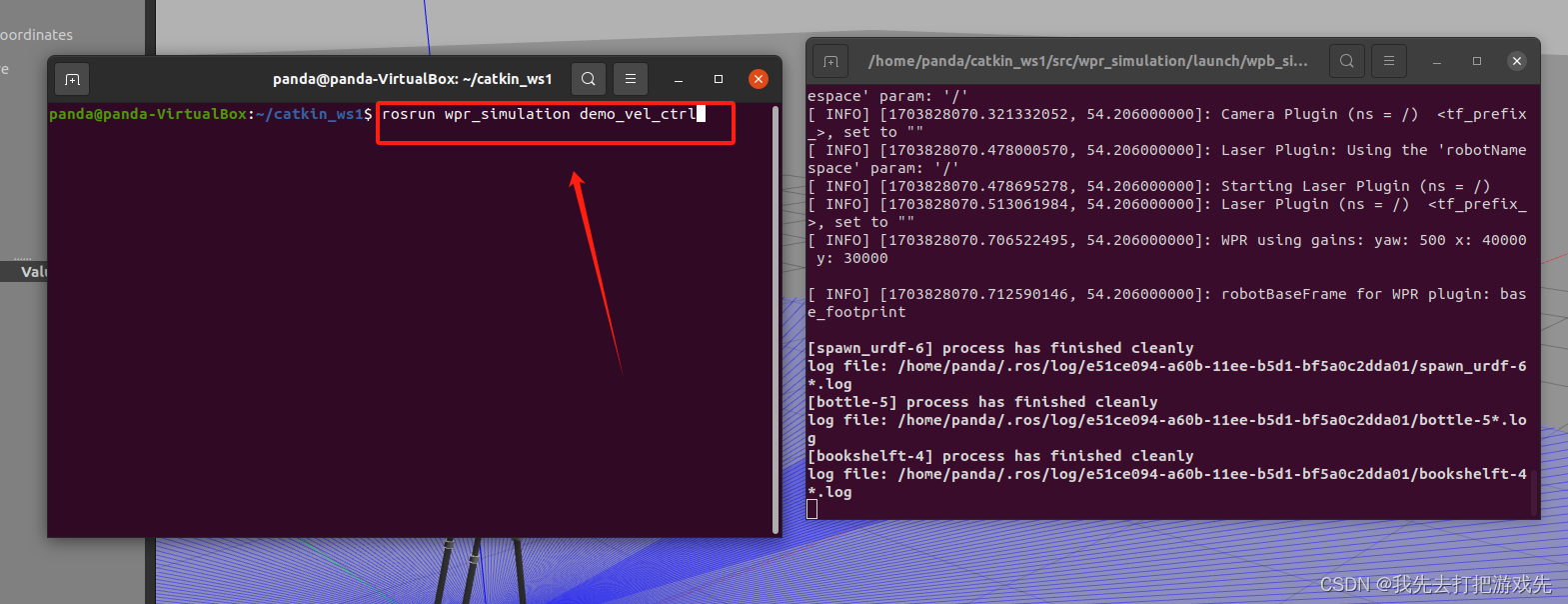
六、查看机器人仿真环境,发现机器人在缓慢前进,这就是本文想要达到的控制效果。
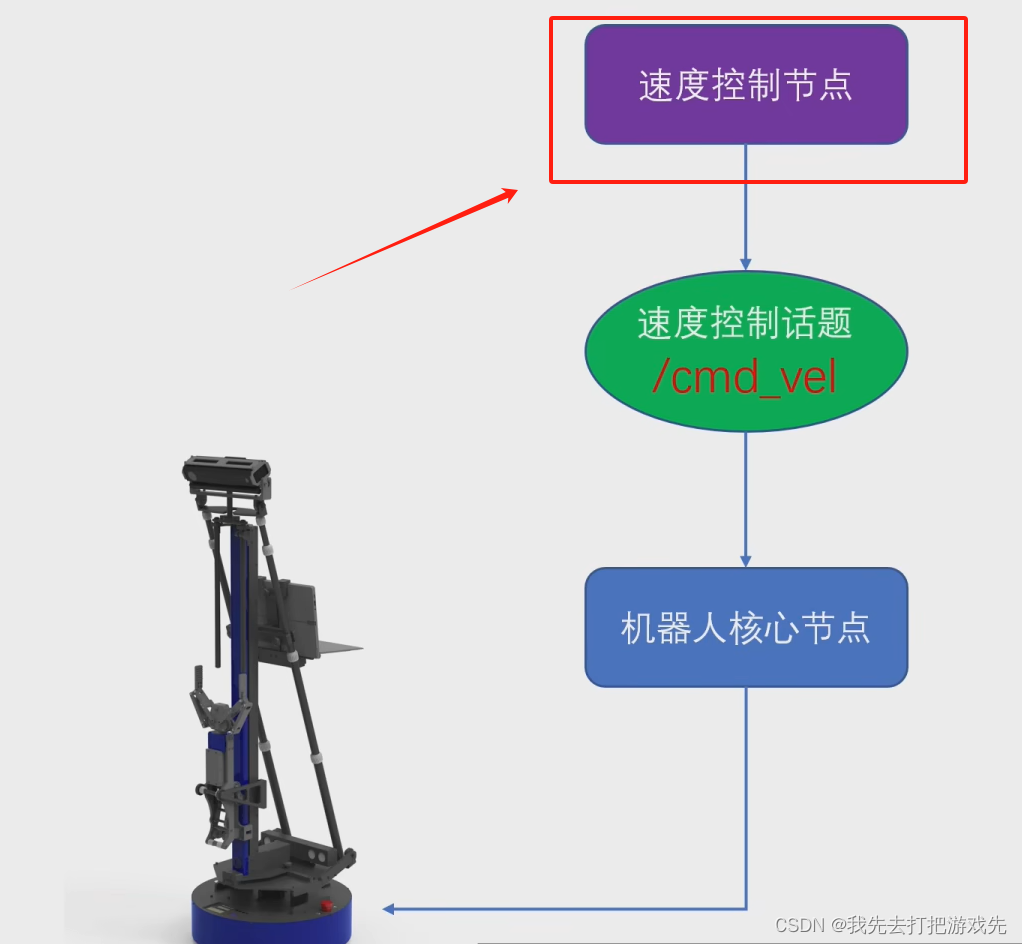
七、我们的目标是构建一个速度控制节点,将速度消息包发送到速度控制话题/cmd_vel中去,这就是个典型的发布者节点
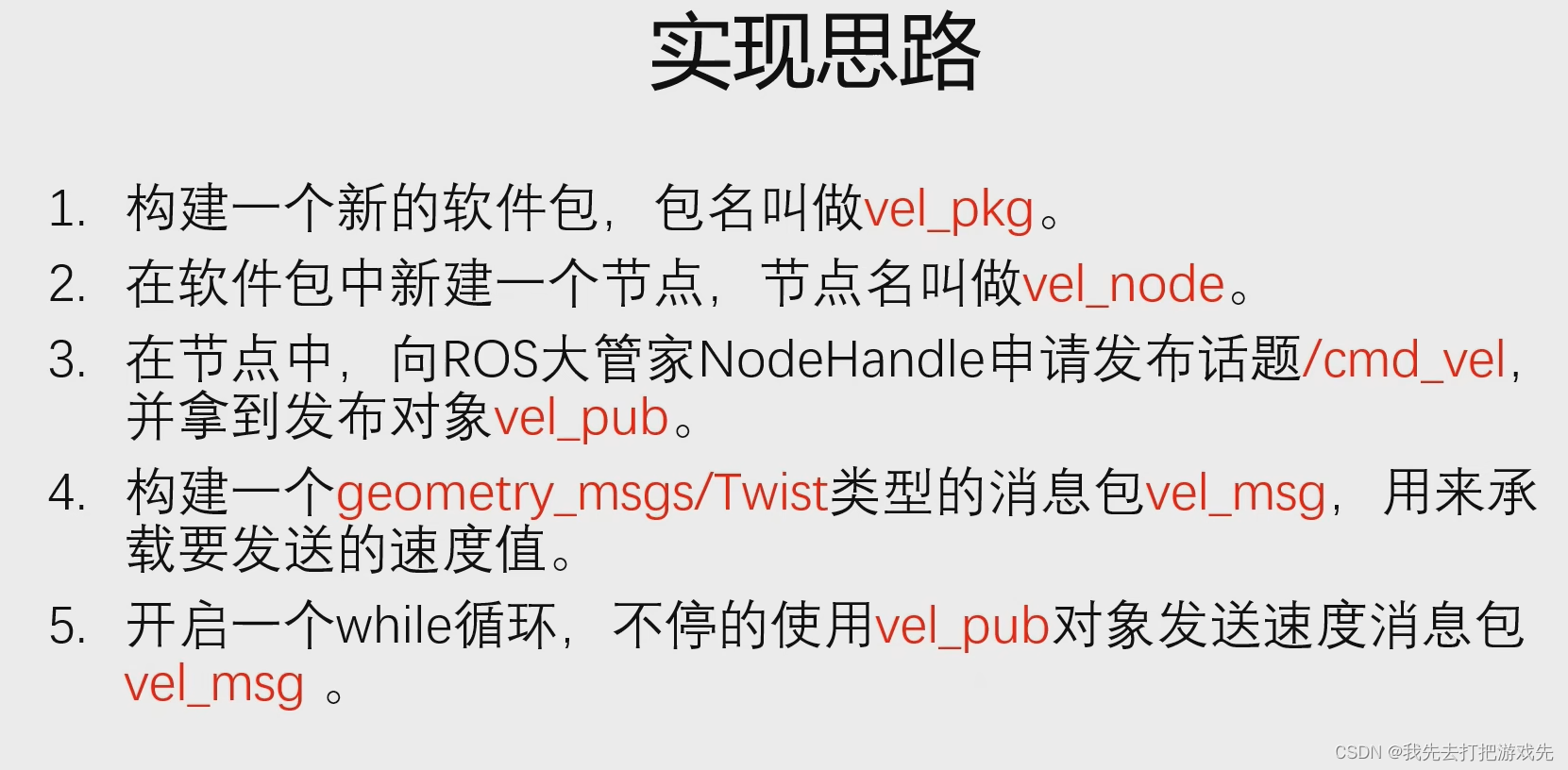
八、实现思路
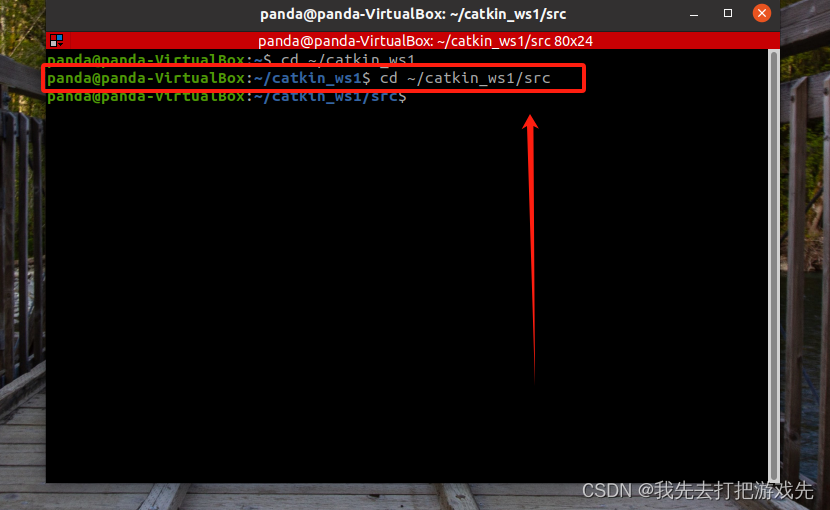
九、打开一个终端,输入
cd ~/catkin_ws1/src进入工作空间下的src目录
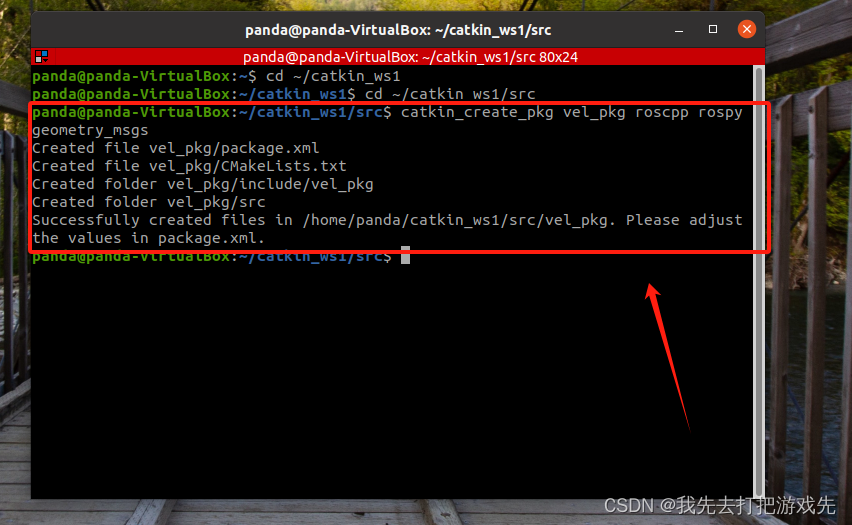
十、输入catkin_create_pkg vel_pkg roscpp rospy geometry_msgs,创建软件包,名字是vel_pkg,依赖项是roscpp rospy和geometry_msgs,这个geometry_msgs就是包含了速度消息类型的软件包
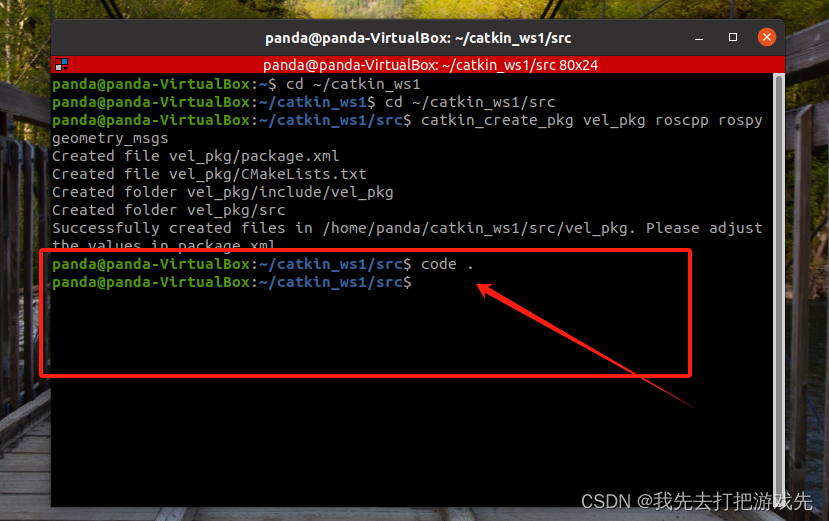
十一、输入code . 打开VScode
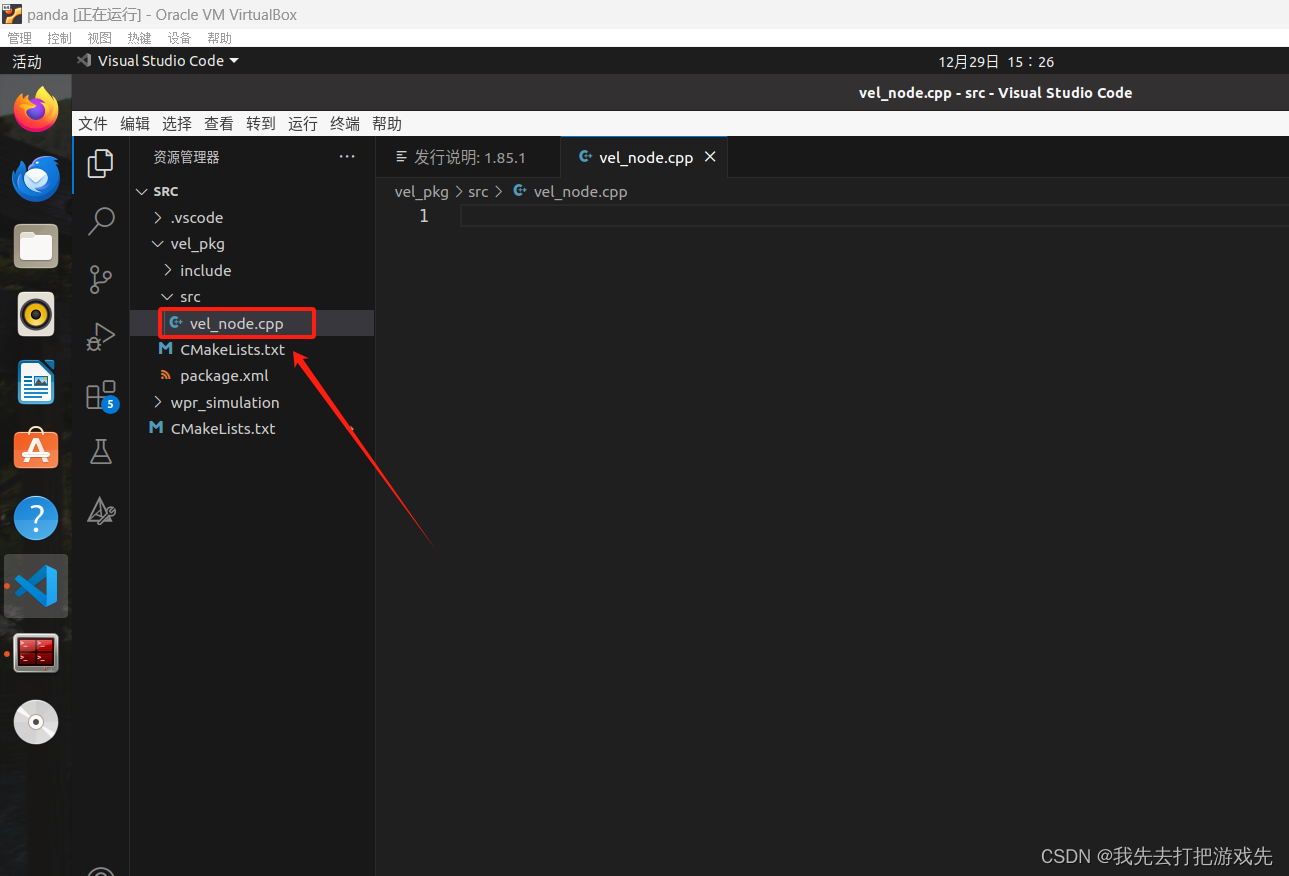
十二、在刚才创建的vel_pkg软件包的src文件夹里新建一个文件
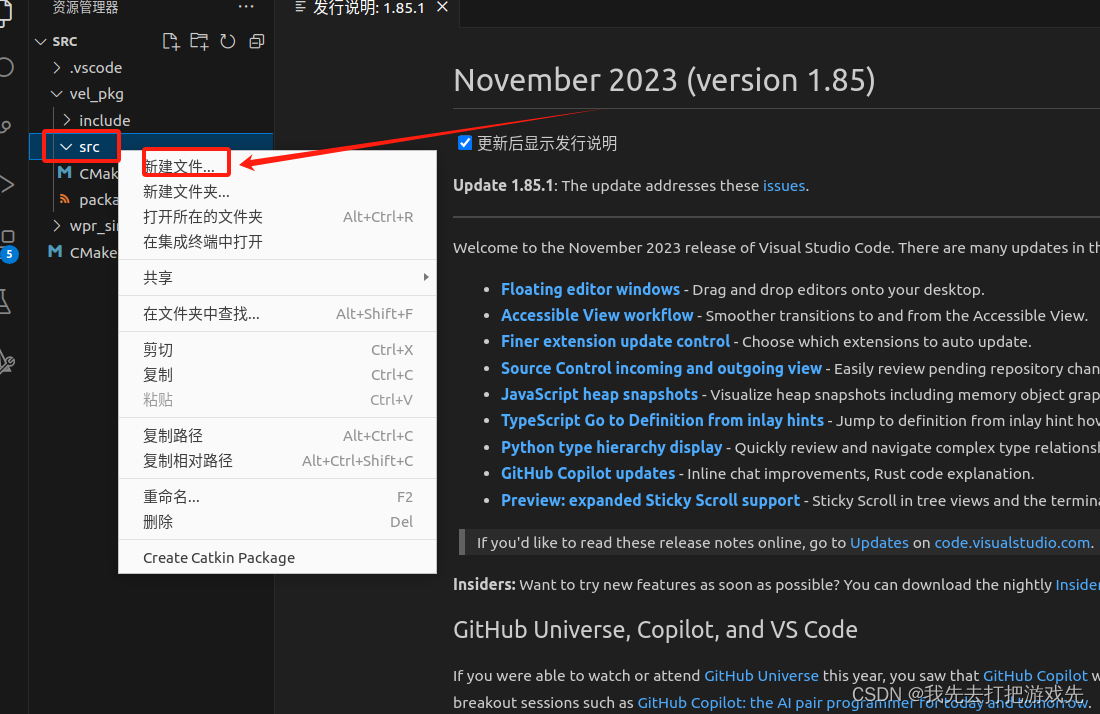
十三、名字叫做vel_node.cpp,这是一个节点代码文件
十四、在vel_node.cpp节点代码文件中写入如下代码
#include <ros/ros.h> //包含ros头文件
#include <geometry_msgs/Twist.h> //速度消息类型的头文件
int main(int argc, char *argv[])
{
ros::init(argc ,argv ,"vel_node"); //初始化节点
ros::NodeHandle n;
//定义发布对象
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
//声明消息包
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.1; //x轴方向前进速度
vel_msg.linear.y = 0; //y轴方向前进速度
vel_msg.linear.z = 0; //z轴方向前进速度
vel_msg.angular.x = 0; //绕x轴旋转速度
vel_msg.angular.y = 0; //绕y轴旋转速度
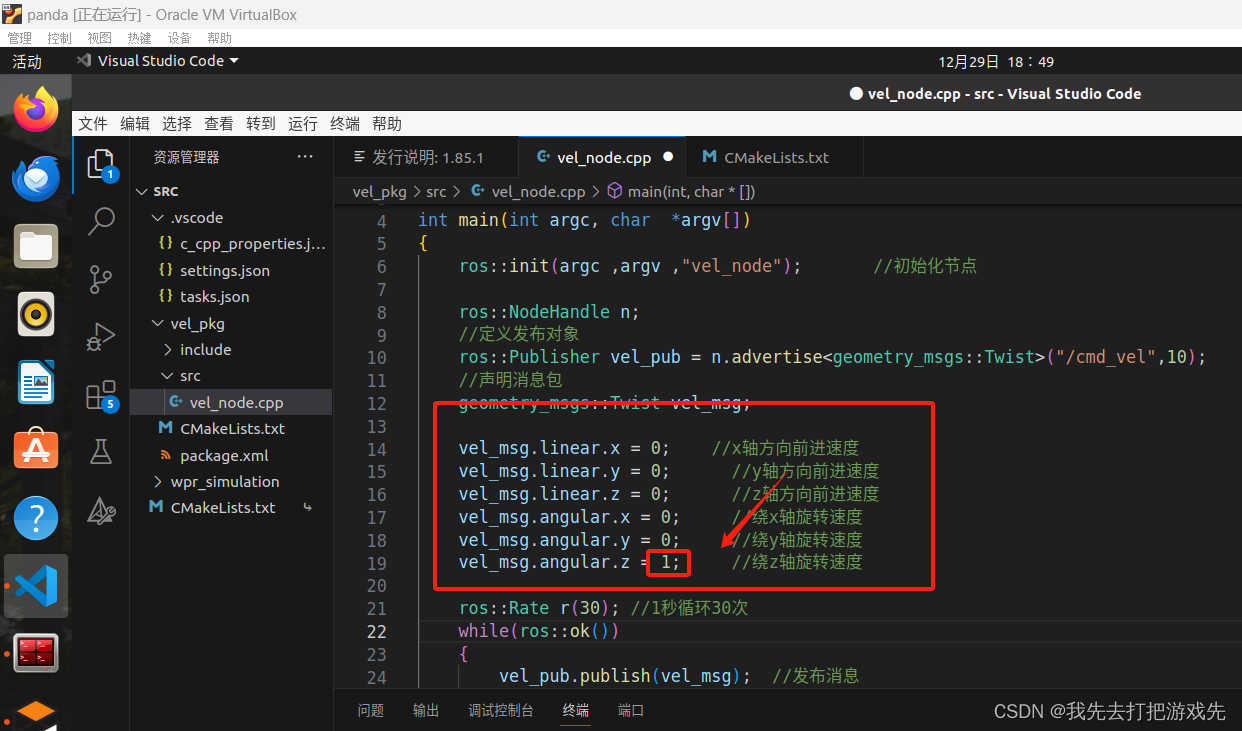
vel_msg.angular.z = 0; //绕z轴旋转速度
ros::Rate r(30); //1秒循环30次
while(ros::ok())
{
vel_pub.publish(vel_msg); //发布消息
r.sleep();
}
return 0;
}
十五、打开软件包的CMakeLists.txt文件
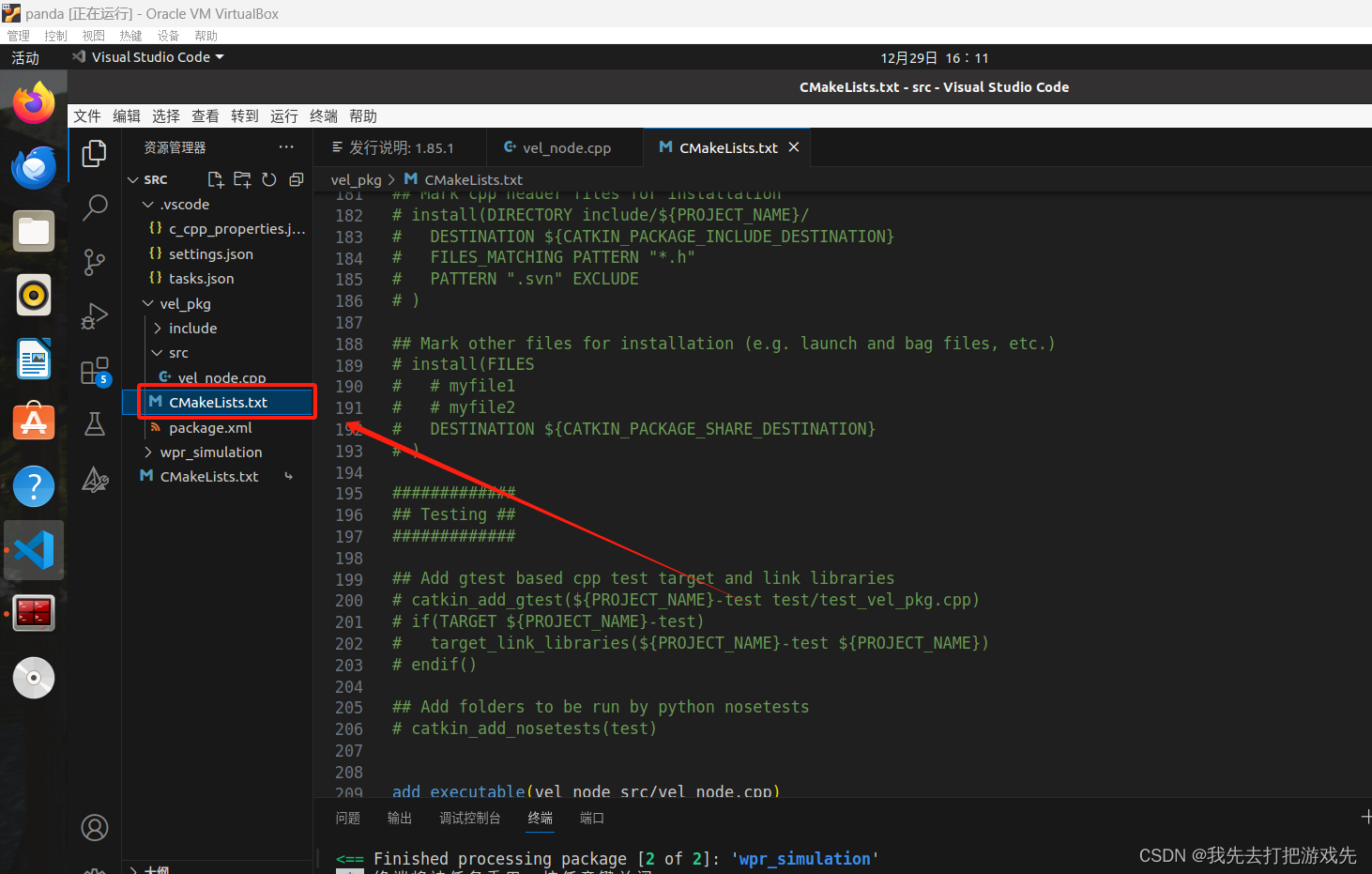
十六、在文件末尾写上这三条编译规则
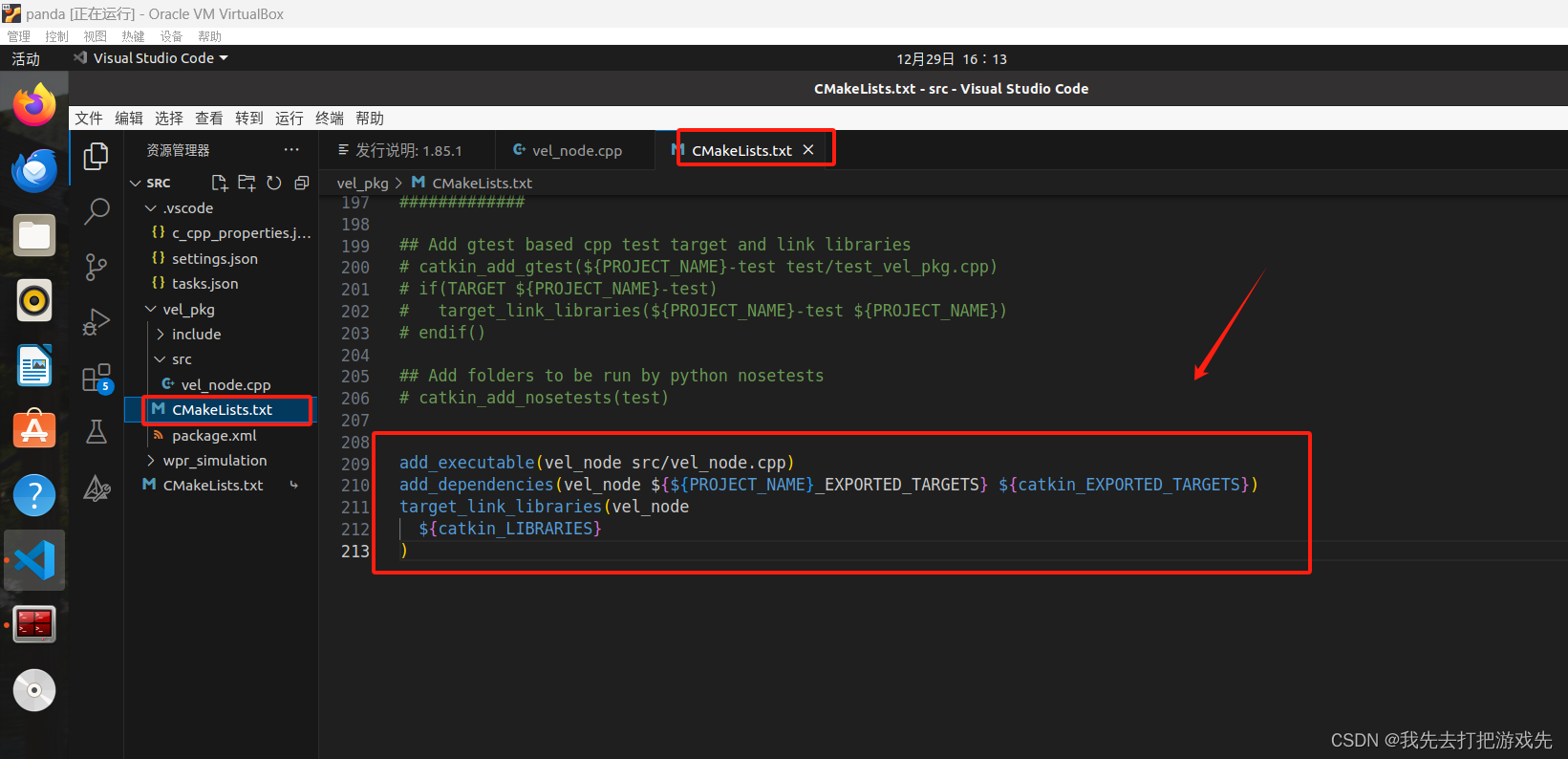
add_executable(vel_node src/vel_node.cpp)
add_dependencies(vel_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(vel_node
${catkin_LIBRARIES}
)
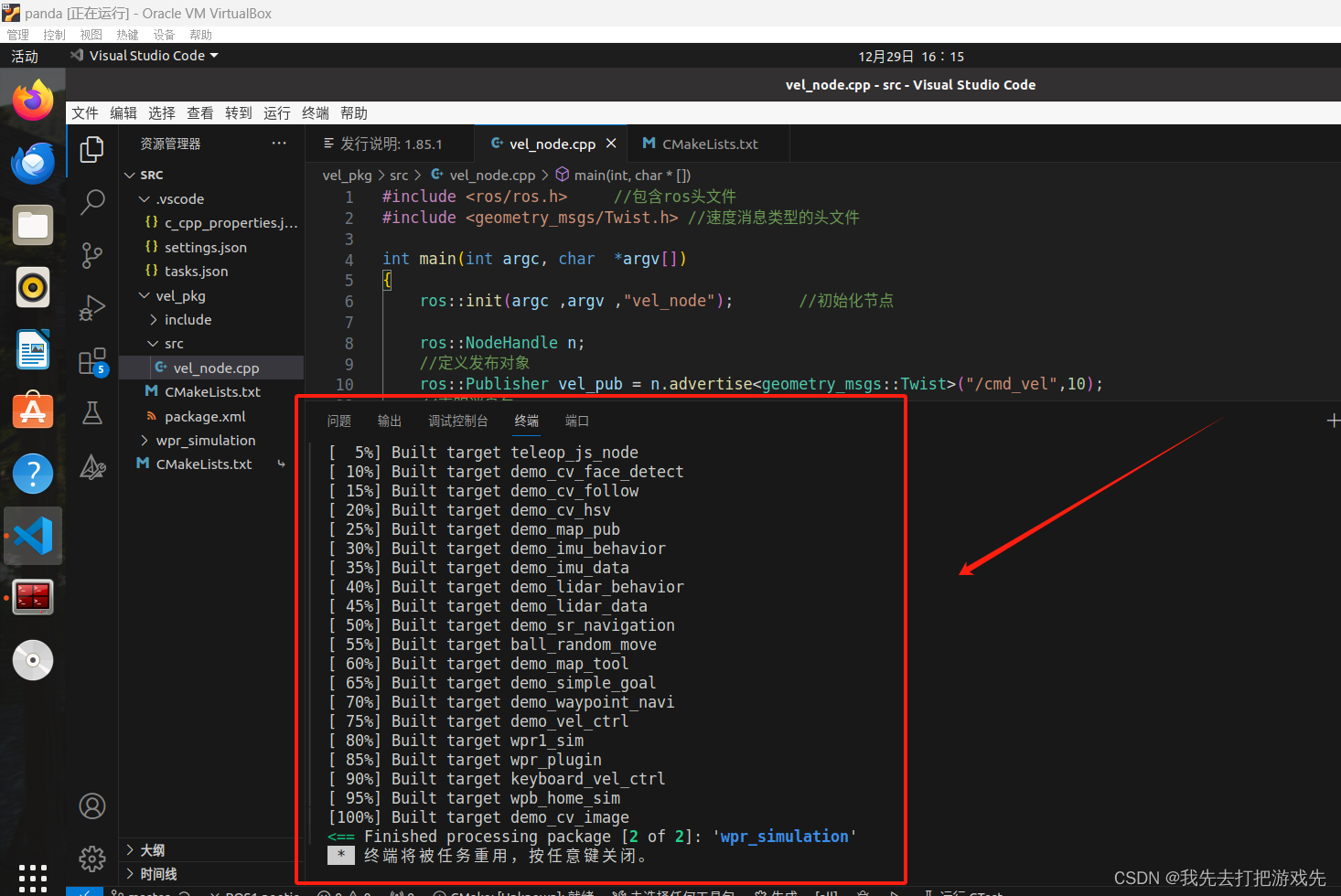
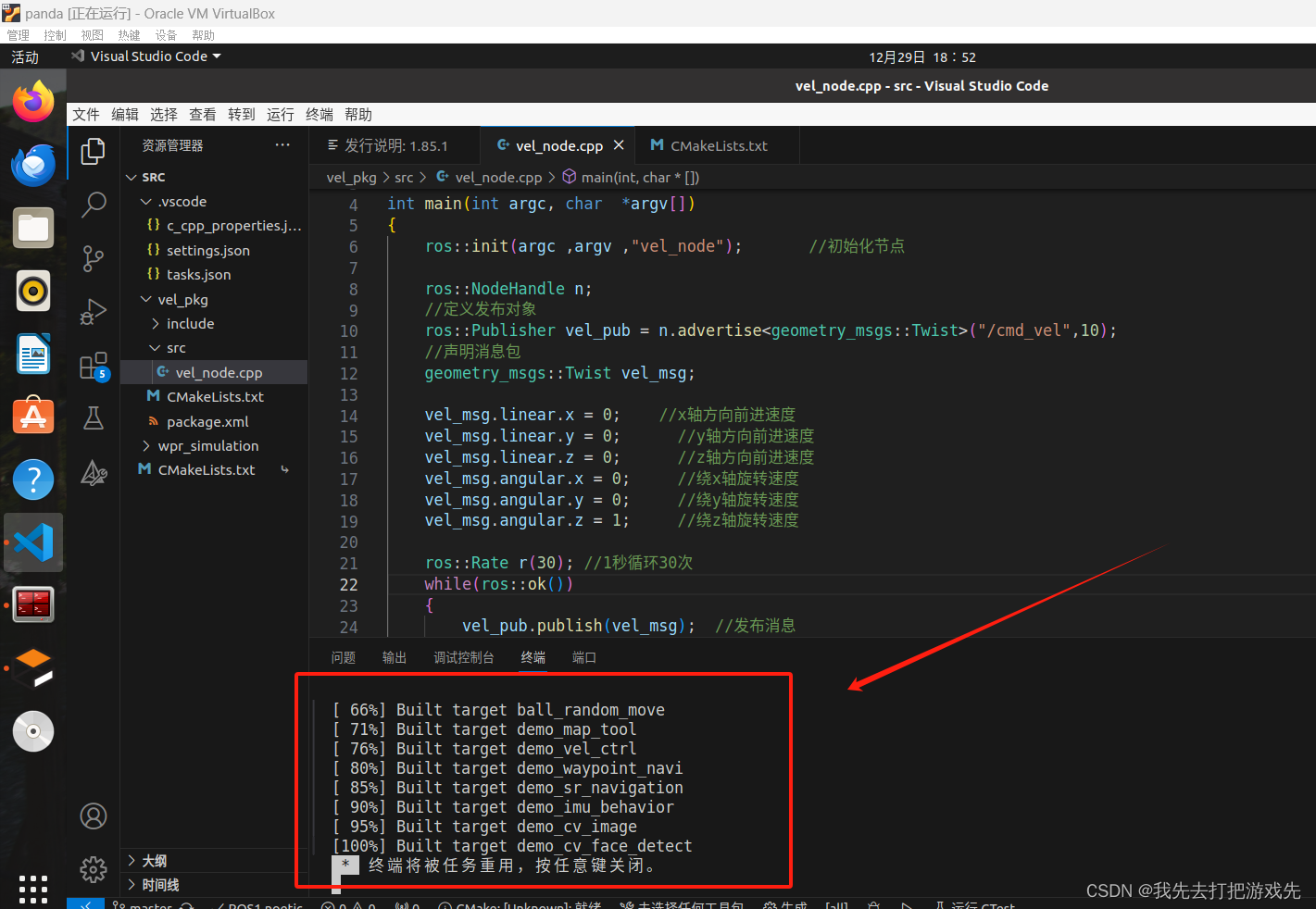
十七、Ctrl+s保存后,Ctrl+Shift+B进行编译,编译成功
十八、打开一个终端,在工作空间中输入source ./devel/setup.bash
十九、输入roslaunch wpr_simulation wpb_simple.launch将仿真环境运行起来
二十、再开另一个终端,输入source ./devel/setup.bash
二十一、输入rosrun vel_pkg vel_node后回车
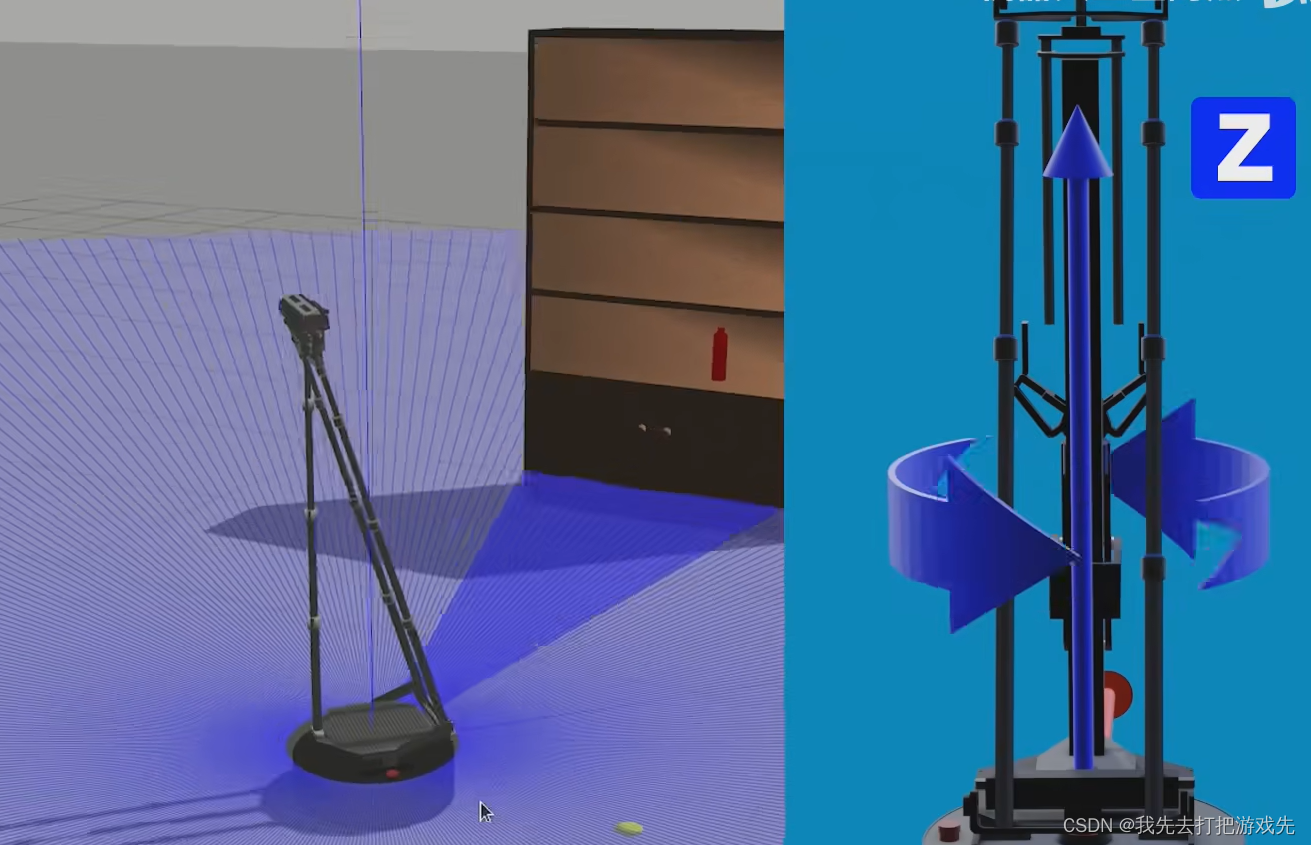
二十二、查看仿真环境,发现机器人向前运动了起来
二十三、回到程序,对程序进行修改,使机器人绕Z轴进行旋转
二十四、按Ctrl+Shift+B进行编译,若出现许多项让你选择,选择如下
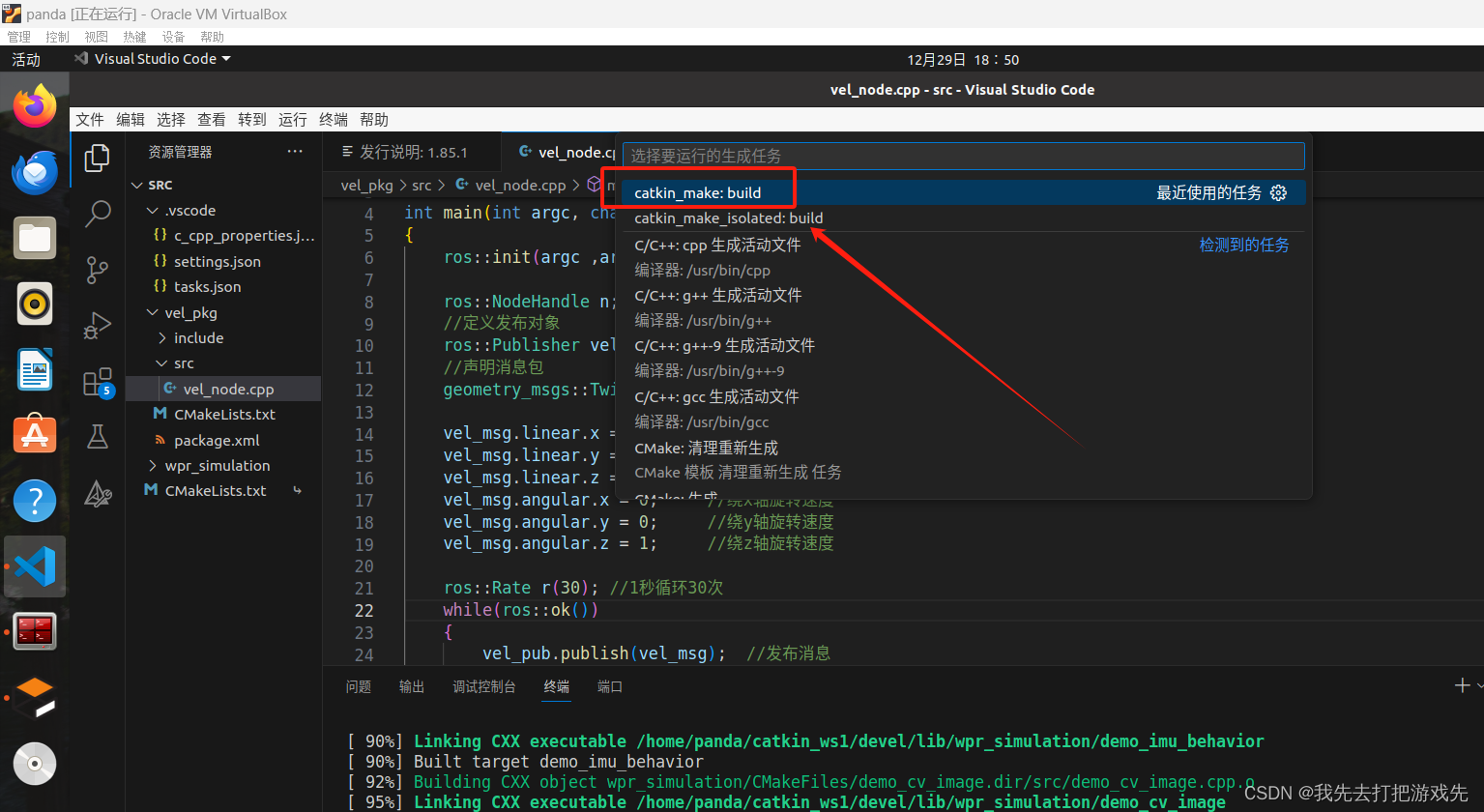
二十五、编译成功
二十六、重新运行节点
二十七、机器人成功绕Z轴运动
文章来源:https://blog.csdn.net/qq_52251819/article/details/135280931
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023年12月 Python(一级)真题解析#中国电子学会#全国青少年软件编程等级考试
- 第十九章 调用Callout Library函数 - 将 $ZF(-5) 与多个库和许多函数调用一起使用
- Java面向对象基础
- 计算机网络—— 概述
- node(express.js创建项目)+连接mysql数据库
- 激活Navicat 出现Navicat Are you sure your navicat has not been patched/modified解决
- vscode配置用户代码片段
- gitee完整使用教程,创建项目并上传
- CRM是什么软件?
- 基于elemen二次封装弹窗组件