超维空间M1无人机使用说明书——61、ROS无人机物体识别与精准投放
发布时间:2024年01月12日
引言:基于空中物流的项目背景。我们提供了使用基于诗句的物体识别和精准投放、降落。实现原理如下:
1、在ROS下使用机载电脑实现物体识别
2、记载电脑根据反馈的位置发布运动控制指令
3、PX4解析机载电脑发布的命令,作出运动控制
4、设置阈值,满足后,ROS发布投放指令
一、视频演示:
视频链接
二、源代码下载链接
源码链接
三、使用说明
1、启动二维码识别与降落程序
roslaunch robot_bringup bringup_precise_drop.launch
未出现红色报错,表明程序运行正常
2、launch文件详解
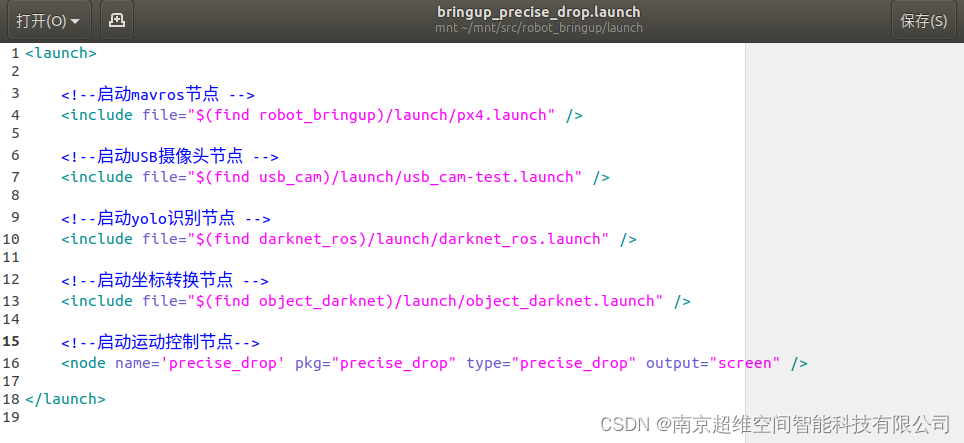
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动yolo识别节点,
4、启动坐标转换节点,以话题方式发布识别到的目标物体的位置信息
5、启动运动控制节点,该节点定位实时的目标物体位置信息,进行运动控制
文章来源:https://blog.csdn.net/qq_35598561/article/details/135559336
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 火力发电厂电气一次部分初步设计(论文+图纸)
- AriaNg与aria2的配置和使用
- Arrays
- 【C语言】指针详解(四)
- elementui+ <el-date-picker type=“datetime“/>时间组件的当前时间的180天之内的禁止选择处理
- 构建健康中国:医保支付购药系统的技术实现
- *JavaScript
- 阿春的450MT售价提前大曝光,符合你的预期吗?
- MySQL_13.InonDB表空间
- 自动化工具 基于 Antd+DRF 开发了一款适配 JMeter 的接口自动化测试报告