基于51单片机的温度报警控制系统Protues仿真设计
目录
一、设计背景
? ? ? ? 随着现代工农业技术的发展及人们对生活环境要求的提高,人们也迫切需要检测与了解环境温度。特别地,高温情况下极易造成火灾,例如,在机房中,电脑等设备发热快,若在短时间内机房温度升高,超出了设备正常温度,就会导致系统瘫痪或产生火灾。低温可能导致设备的处理器运行速度变慢,RAM(随机访问存储器)响应时间增加,以及设备的整体性能下降。特别是对于电子组件和机械设备,低温会使其反应速度减缓。在这种情况下,温度如果得到及时的控制与报警,就可以在一定程度上避免上述情况的发生。??
? ? ? ?另一个方面,单片机技术已经普及到各个领域,已经成为一种比较成熟的技术。因此本文将利用51单片机芯片,设计一种基于51单片机的温度报警控制系统。通过仿真实验证明,本文设计的温度报警控制系统工作时,液晶显示屏实时显示温度值并利用按键设定温度上下限范围,当所测温度超过设定的温度范围时,蜂鸣器发出报警信号,启动风扇降温;当所测温度低于设定的温度范围时,蜂鸣器发出报警信号,启动加热器进行加热。本设计实现的温控系统结构简单,可操作性强,具有一定的实用价值。
二、实现功能
? ? ? ? 本设计以51单片机为控制核心,设计一种温度报警控制系统。可具体实现以下功能:
? ? ?(1)系统通过DS18B20采集当前温度环境温度并显示(精确到0.1度);
? ? ?(2)系统包含三个按键,可设定上下限温度的阈值;
? ? ?(3)若当前温度高于上限阈值温度时,声光报警,开启电机降温;若当前温度低于下限阈值温度时,声光报警,启动加热装置。
三、总体硬件设计
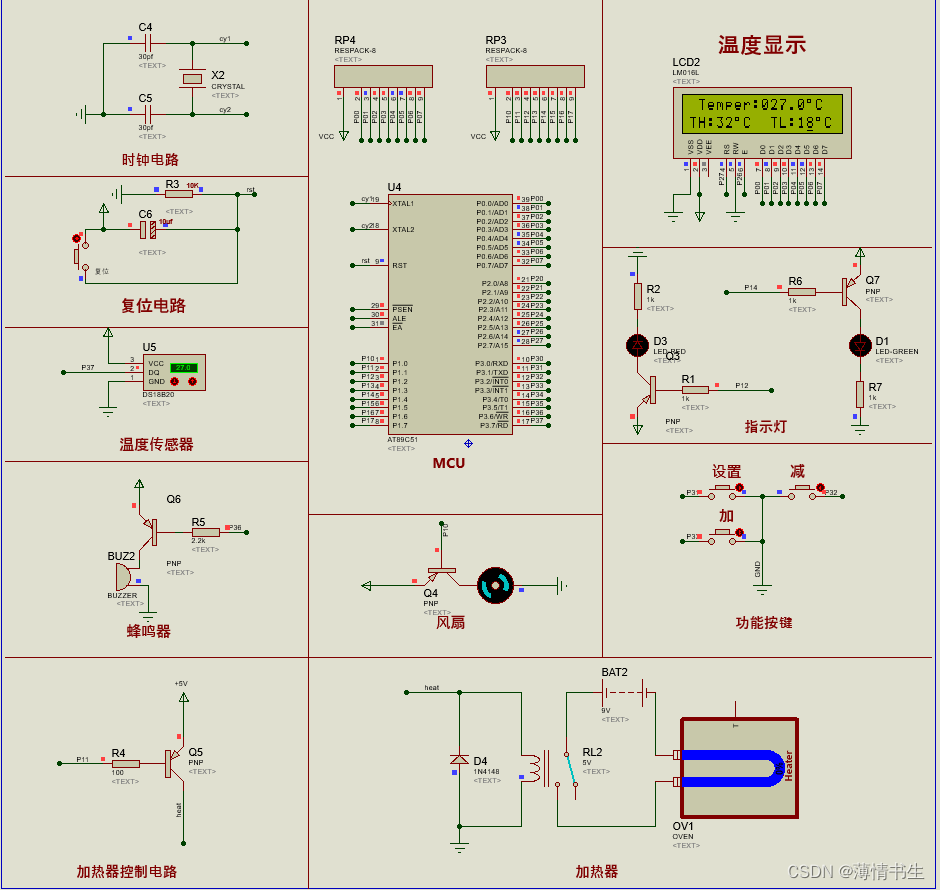
? ? ? ?本系统设计的基于51单片机的温度报警控制系统,总体设计框图如图1所示,主要包括单片机最小系统、温度采集电路、独立式按键电路、显示电路、报警电路、加热电路和散热电路,其中主控芯片采用功耗低、性能高的单片机 STC89C52,温度采集电路采用数字温度传感器DS18B20,显示电路采用 LCD1602 液晶显示器,报警电路采用蜂鸣器以及LED 指示灯设计实现声光报警,独立式按键用来设置不同时间段温度报警的上下限阈值。当实测环境温度值大于的温度上限值时,系统自动进入散热模式,直流电机运转带动风扇工作,同时蜂鸣器响、红色LED 指示灯点亮 ;若低于设定的温度下限阈值,系统自动进入加热模式,继电器控制加热设备工作,同时蜂鸣器响、绿色LED 指示灯点亮 ;若当前温度处于设定的温度上下限阈值之间时,关闭散热、加热及报警,从而使温度控制在设定的范围内。
? ? ? ? ??
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?图1 系统总体设计框图
四、仿真演示
当实测环境温度值处于设定的温度上下限阈值之间时,关闭散热、加热及报警。

当实测环境温度值大于设定的温度上限阈值时,直流电机运转带动风扇工作,系统进入散热模式,同时蜂鸣器响、红色LED 指示灯点亮。

当实测环境温度值低于设定的温度下限阈值,系统进入加热模式,继电器控制加热设备工作,同时蜂鸣器响、绿色LED 指示灯点亮 。
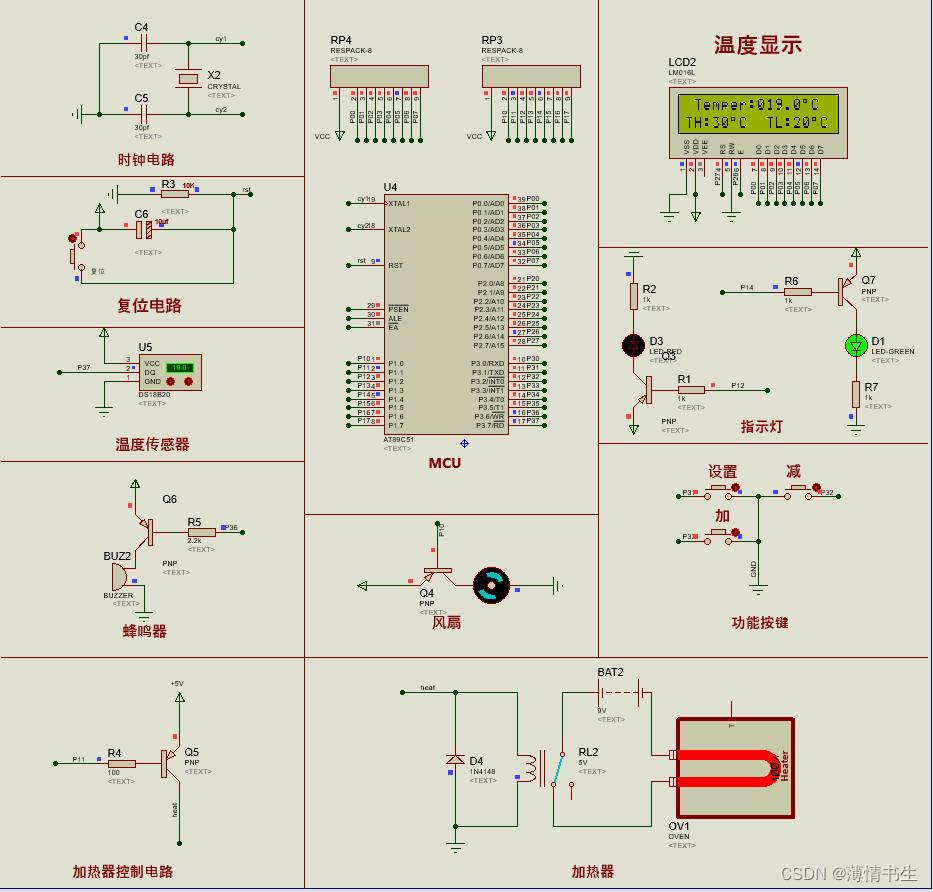
通过三个按键,设定上下限温度阈值,设置过程中LCD上会有光标提示。
四、源程序
#include <reg51.h>
#define uint unsigned int
#define uchar unsigned char //宏定义
#define LCD1602 P0
sbit SET=P3^1; //定义调整键
sbit DEC=P3^2; //定义减少键
sbit ADD=P3^3; //定义增加键
sbit BUZZ=P3^6; //定义蜂鸣器
sbit ALAM=P1^2; //定义灯光报警
sbit fengshan=P1^0; //定义风扇降温
sbit jiare=P1^1; //定义加热
sbit ALAM1=P1^4;
sbit DQ=P3^7; //定义DS18B20总线I/O
sbit RS = P2^7;
sbit EN = P2^6;
bit shanshuo_st; //闪烁间隔标志
bit beep_st; //蜂鸣器间隔标志
uchar x=0; //计数器
uchar code tab1[]={" Temper: . C "};
uchar code tab2[]={"TH: C TL: C"};
uint c;
uchar Mode=0; //状态标志
signed char TH=30; //上限报警温度,默认值为30
signed char TL=20; //下限报警温度,默认值为20
//============================================================================================
//====================================DS18B20=================================================
//============================================================================================
/*****延时子程序*****/
void Delay_DS18B20(int num)
{
while(num--) ;
}
void delay(uint xms)//延时函数,有参函数
{
uint x,y;
for(x=xms;x>0;x--)
for(y=110;y>0;y--);
}
/*****初始化DS18B20*****/
void Init_DS18B20(void)
{
unsigned char x=0;
DQ = 1; //DQ复位
Delay_DS18B20(8); //稍做延时
DQ = 0; //单片机将DQ拉低
Delay_DS18B20(80); //精确延时,大于480us
DQ = 1; //拉高总线
Delay_DS18B20(14);
x = DQ; //稍做延时后,如果x=0则初始化成功,x=1则初始化失败
Delay_DS18B20(20);
}
/*****读一个字节*****/
unsigned char ReadOneChar(void)
{
unsigned char i=0;
unsigned char dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 给脉冲信号
dat>>=1;
DQ = 1; // 给脉冲信号
if(DQ)
dat|=0x80;
Delay_DS18B20(4);
}
return(dat);
}
/*****写一个字节*****/
void WriteOneChar(unsigned char dat)
{
unsigned char i=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = dat&0x01;
Delay_DS18B20(5);
DQ = 1;
dat>>=1;
}
}
/*****读取温度*****/
unsigned int ReadTemperature(void)
{
unsigned char a=0;
unsigned char b=0;
unsigned int t=0;
float tt=0;
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0x44); //启动温度转换
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器
a=ReadOneChar(); //读低8位
b=ReadOneChar(); //读高8位
t=b;
t<<=8;
t=t|a;
tt=t*0.0625;
// t= tt*10+0.5; //放大10倍输出并四舍五入
t= tt*10+5.5;
return(t);
}
/*****读取温度*****/
void check_wendu(void)
{
c=ReadTemperature()-5; //获取温度值并减去DS18B20的温漂误差
if(c>1200)
c=1200;
}
/********液晶写入指令函数与写入数据函数,以后可调用**************/
void write_1602com(uchar com)//****液晶写入指令函数****
{
RS=0;//数据/指令选择置为指令
// rw=0; //读写选择置为写
LCD1602=com;//送入数据
delay(1);
EN=1;//拉高使能端,为制造有效的下降沿做准备
delay(1);
EN=0;//en由高变低,产生下降沿,液晶执行命令
}
void write_1602dat(uchar dat)//***液晶写入数据函数****
{
RS=1;//数据/指令选择置为数据
// rw=0; //读写选择置为写
LCD1602=dat;//送入数据
delay(1);
EN=1; //en置高电平,为制造下降沿做准备
delay(1);
EN=0; //en由高变低,产生下降沿,液晶执行命令
}
void lcd_init()//***液晶初始化函数****
{
uchar a;
write_1602com(0x38);//设置液晶工作模式,意思:16*2行显示,5*7点阵,8位数据
write_1602com(0x0c);//开显示不显示光标
write_1602com(0x06);//整屏不移动,光标自动右移
write_1602com(0x01);//清显示
write_1602com(0x80);//日历显示固定符号从第一行第1个位置之后开始显示
for(a=0;a<16;a++)
{
write_1602dat(tab1[a]);//向液晶屏写日历显示的固定符号部分
delay(3);
}
write_1602com(0x80+0x40);//时间显示固定符号写入位置,从第2个位置后开始显示
for(a=0;a<16;a++)
{
write_1602dat(tab2[a]);//写显示时间固定符号,两个冒号
delay(3);
}
}
void display()
{
if(Mode==0)
{
write_1602com(0x80+8);
write_1602dat(c/1000+0x30);
write_1602dat((c%1000)/100+0x30);
write_1602dat(((c%1000)%100)/10+0x30);
write_1602com(0x80+12);
write_1602dat(((c%1000)%100)%10+0x30);
write_1602com(0x80+13);
write_1602dat(0xdf);
write_1602com(0x80+0x40+3);
write_1602dat(TH/10+0x30);
write_1602dat(TH%10+0x30);
write_1602dat(0xdf);
write_1602com(0x80+0x40+12);
write_1602dat(TL/10+0x30);
write_1602dat(TL%10+0x30);
write_1602dat(0xdf);
}
}
//=====================================================================================
/*****初始化定时器0*****/
void InitTimer(void)
{
TMOD=0x1;
TH0=0x3c;
TL0=0xb0; //50ms(晶振12M)
EA=1; //全局中断开关
TR0=1;
ET0=1; //开启定时器0
}
void KEY()
{
//功能键
if(SET==0)
{
BUZZ=0;
delay(10);
if(SET==0)
{
Mode++;
if(Mode==3)
Mode=0;
BUZZ=1;
}
while(SET==0)
{
if(Mode==0)
{
// write_1602com(0x80+0x40+6);
write_1602com(0x0c);
}
else if(Mode==1)
{
write_1602com(0x80+0x40+4);
write_1602com(0x0f);
}
else
{
write_1602com(0x80+0x40+13);
write_1602com(0x0f);
}
}
}
//增加
if(ADD==0&&Mode==1)
{
BUZZ=0;
delay(10);
if(ADD==0)
{
TH++;
if(TH>=99)
TH=99;
write_1602com(0x80+0x40+3);
write_1602dat(TH/10+0x30);
write_1602dat(TH%10+0x30);
write_1602com(0x80+0x40+4);
BUZZ=1;
}
while(ADD==0);
}
//减少
if(DEC==0&&Mode==1)
{
BUZZ=0;
delay(10);
if(DEC==0)
{
TH--;
if(TH==TL)
TH=TL+1;
write_1602com(0x80+0x40+3);
write_1602dat(TH/10+0x30);
write_1602dat(TH%10+0x30);
write_1602com(0x80+0x40+4);
BUZZ=1;
}
while(DEC==0);
}
if(ADD==0&&Mode==2)
{
BUZZ=0;
delay(10);
if(ADD==0)
{
TL++;
if(TL==TH)
TL=TH-1;
write_1602com(0x80+0x40+12);
write_1602dat(TL/10+0x30);
write_1602dat(TL%10+0x30);
write_1602com(0x80+0x40+13);
BUZZ=1;
}
while(ADD==0);
}
//减少
if(DEC==0&&Mode==2)
{
BUZZ=0;
delay(10);
if(DEC==0)
{
TL--;
if(TL<=0)
TL=0;
write_1602com(0x80+0x40+12);
write_1602dat(TL/10+0x30);
write_1602dat(TL%10+0x30);
write_1602com(0x80+0x40+13);
BUZZ=1;
}
while(DEC==0);
}
}
/*****报警子程序*****/
void Alarm()
{
if(x>=10){beep_st=~beep_st;x=0;}
if(Mode==0)
{
if((c/10)>=TH)
{
fengshan=0;
jiare=1;
ALAM=0;
ALAM1=1;
if(beep_st==1)
BUZZ=0;
else
BUZZ=1;
}
else if((c/10)<TL)
{
fengshan=1;
jiare=0;
ALAM1=0;
ALAM=1;
if(beep_st==1)
BUZZ=0;
else
BUZZ=1;
}
else
{
BUZZ=1;
ALAM=1;
ALAM1=1;
fengshan=1;
jiare=1;
}
}
else
{
BUZZ=1;
ALAM=1;
ALAM1=1;
fengshan=1;
jiare=1;
}
}
/*****主函数*****/
void main(void)
{
uint z;
delay(1);
lcd_init();
delay(1);
InitTimer(); //初始化定时器
for(z=0;z<100;z++)
{
check_wendu();
delay(1);
}
while(1)
{
display();
KEY();
Alarm();
check_wendu();
}
}
/*****定时器0中断服务程序*****/
void timer0(void) interrupt 1
{
TH0=0x3c;
TL0=0xb0;
x++;
}仿真与程序源文件百度网盘链接:https://pan.baidu.com/s/1KKbiyLIr71JHmF1Sj-sBpw?
提取码:eumg?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 计算机基础面试题 |02.精选计算机基础面试题
- GPT应用程序上线注意的问题
- 说下SD-WAN应用场景
- 如何在 Linux 中管理用户?
- Python每日一练-DAY03
- linux查看进程对应的线程(数)
- Python教父推荐:《Python基础教程》(第3版) 中文PDF电子版限免
- Kafka之集群搭建
- Adobe ColdFusion 文件读取漏洞(CVE-2010-2861)
- libevent http-server示例