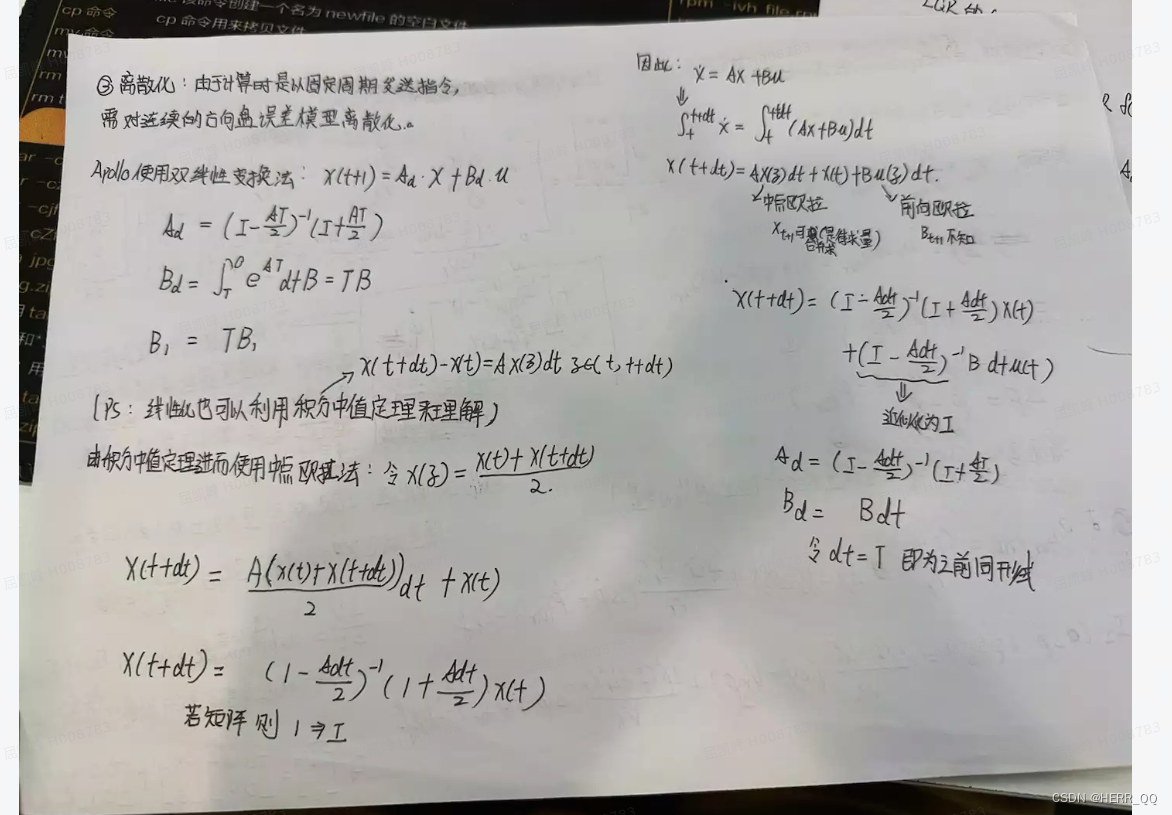
【algorithm】自动驾驶常见常考的几个模型和推导(每次面都看一遍),顺便总结自己遇到的考题经验不断更新
发布时间:2023年12月29日
写在前面
本来快达成目标了,没想到公司遭受了问题,公司和同事我感觉还是挺好的,有国企的正规也有小企业的灵活,大家都很有学习欲望。
作为本次再次复习回忆如下:
把之前面试准备的 机器学习(基本搬运到CSDN平台了)、规划(基于之前的公司同事教导和常见算法轨迹 lattice em 路径 diji a star rrt rrt*)、控制(控制器和模型),工具链(matlab ide repo git anaconda ros linux操作)其他(frenet 、大地车辆坐标转换、点到线距离、找投影、插值、离散点求曲率(以及各种几何问题)、卡尔曼 三次道路多项式 地图处理 滤波 轨迹优化)刷题和有cpp相关的作为小白接触到的知识都总结成了word。 本文先总结搬运模型相关,希望大佬们给点方向提建议,渴望进步,其实对于经典现代控制论本身,很多东西都忘记了,只能作为笔记和考试记录存在了,实践中感觉一直用不上或者不需要再推导了。 现在的烦恼是:其中有很多新东西和非规划控制的内容由于工作方向我只能自己demo,最希望讨论和接触的是实践中积累的问题处理办法,还有能实际在工作中部署最新论文的东西,可惜工作就是工作,同时被专业方向卡住,只能积累再积累。
Stanley and pure pursuit

运动学
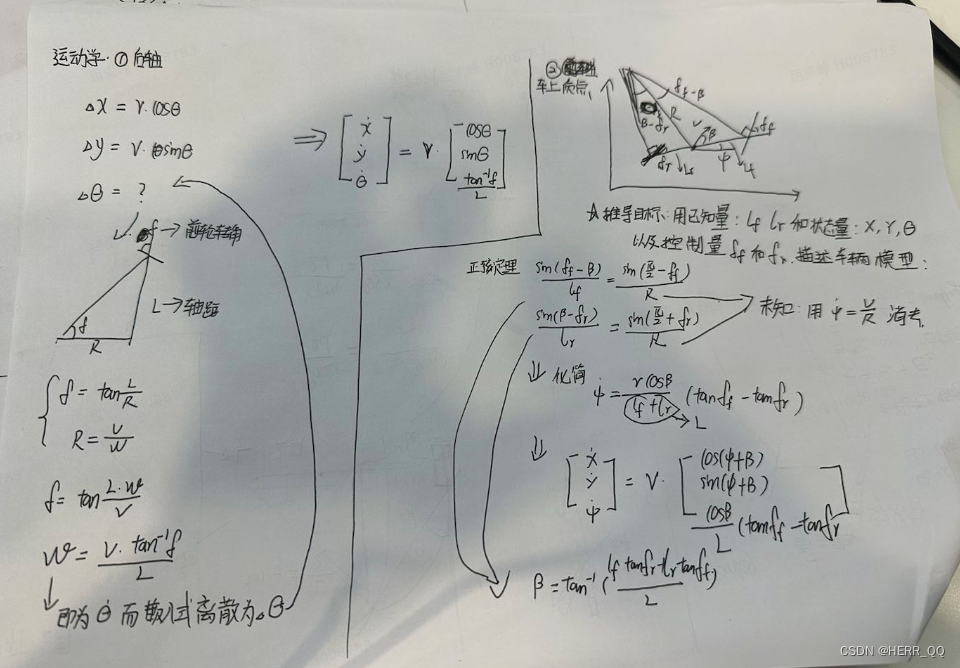
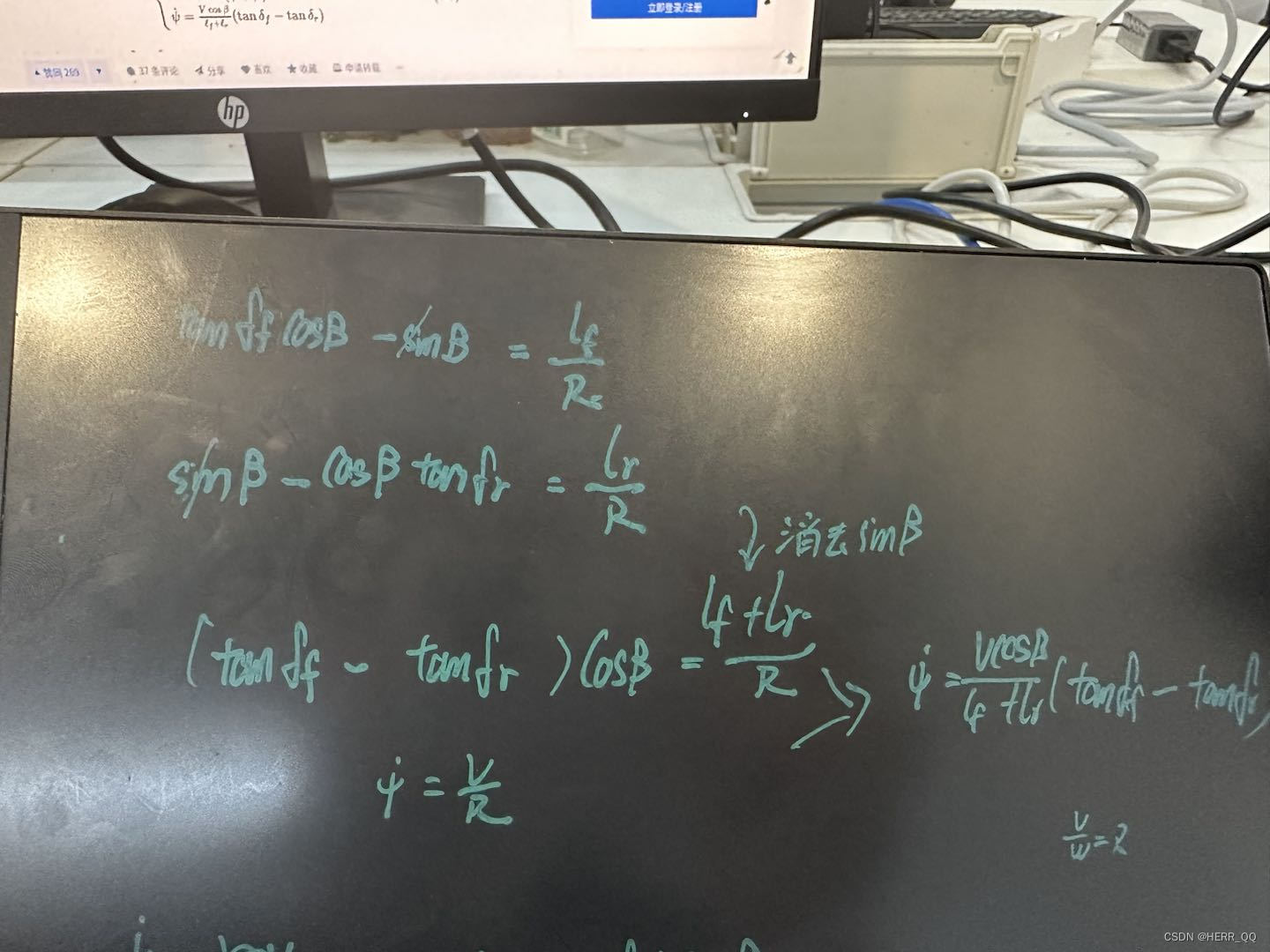
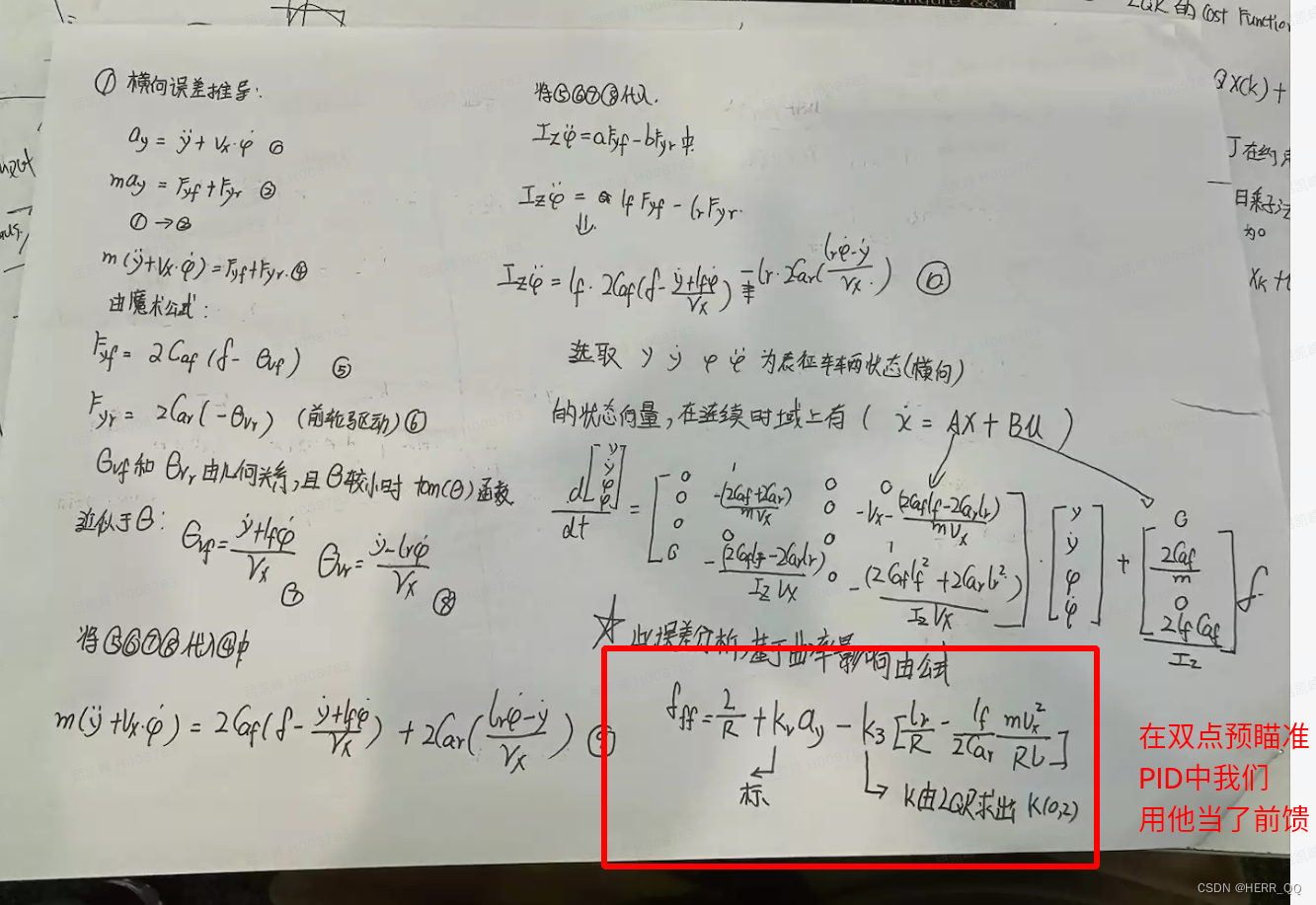
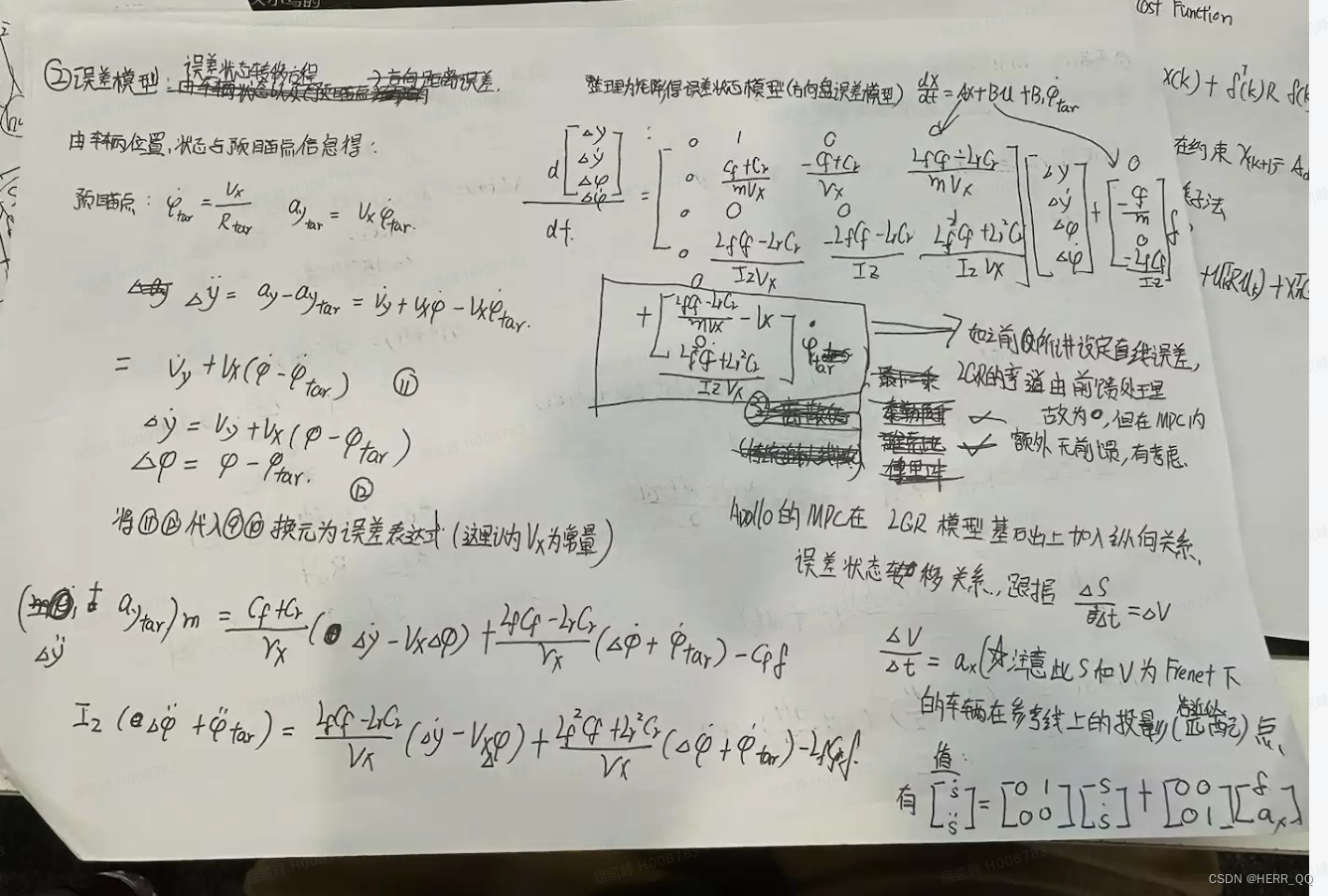
动力学
并联pid
预瞄 2个点 近:lateraldisdiff lateraldisdiffrate 远headingdiff headingdiffrate
yawrate 要稳 pd要控制好
串联pid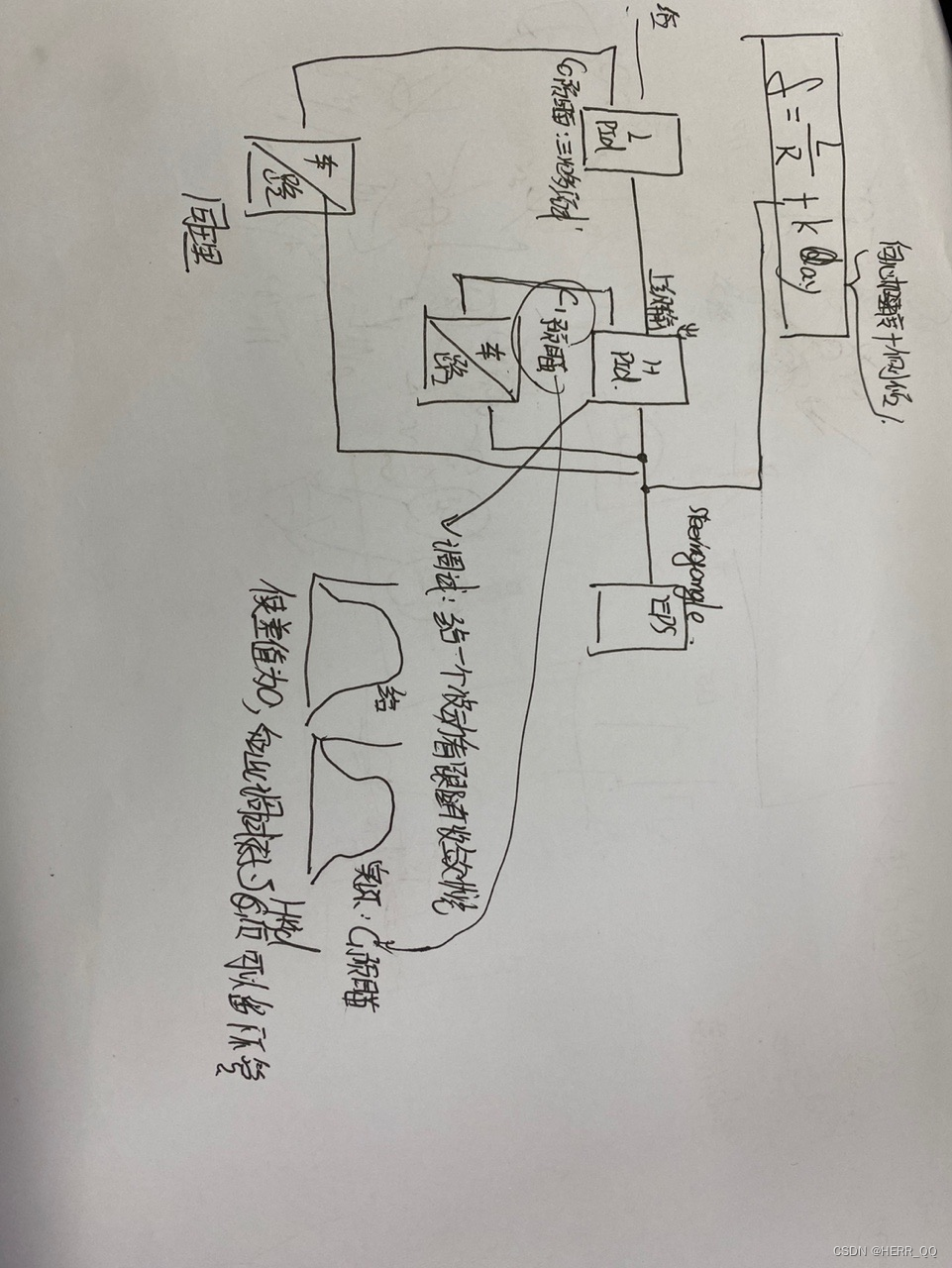
MPC控制中 使用
会找投影点 预瞄要选好 用acado osqp ,具体模型一会更新
其他:
-颠簸
-手力
-控制接口转化
-握手
-滤波
-限幅
-限rate
-侧倾
-前置车道线处理
-激活退方向盘稳定渐入渐出
-canoe ape分析
-matlab回放 ros回放
- usw.
文章来源:https://blog.csdn.net/weixin_46479223/article/details/135293785
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Python操作Word:轻松实现文档的创建、编辑与自动化处理
- Maven 项目依赖仓库配置详解:pom.xml 中的 repositories 与 Maven 配置文件的调用顺序
- 浅谈无线测温产品在马来西亚某配电项目的应用
- linux比起window有什么开发优势
- 快速学习Java Agent
- 【MySQL】巧用 DATE_SUB 函数判断时间是否连续
- C语言中关于函数递归的理解
- 【sql/python】表中某列值以列表聚合
- 开源问答平台网站源码系统:提升关键词排名+SEO优化 带完整的搭建教程以及安装部署过程
- Flutter 与 Android原生 相互通信:BasicMessageChannel、MethodChannel、EventChannel