基于UKF无迹卡尔曼滤波的电池Soc估计matlab仿真
发布时间:2024年01月23日
目录
1.课题概述
? ? ? ?通过UKF无迹卡尔曼滤波对电池的SOC进行估计,并对比电池真实的SOC,输出两者的对比仿真结果。
2.系统仿真结果
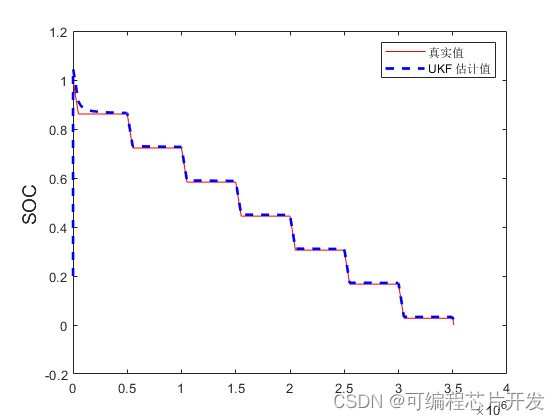
3.核心程序与模型
版本:MATLAB2022a

0021
4.系统原理简介
? ? ? ? ?电池状态估计,特别是电池的荷电状态(State of Charge, SoC)估计,在电动汽车、混合动力汽车以及其他电池应用领域中至关重要。无迹卡尔曼滤波(Unscented Kalman Filter, UKF)是一种非线性滤波方法,特别适用于处理非线性系统的状态估计问题。
4.1 电池模型
? ? ? ?为了估计电池的SoC,首先需要建立一个电池模型。电池模型通常包括电气模型、热模型和老化模型等。在这里,我们主要关注电气模型,它描述了电池的电压、电流和SoC之间的关系。
电气模型可以用以下非线性方程表示:

? ? ? ?其中,V?是电池端电压,SoC?是电池的荷电状态,I?是电池电流,T?是电池温度,Qnom??是电池的额定容量,Δt?是时间步长,f?是一个非线性函数,描述了电池的电气特性。
4.2 无迹卡尔曼滤波(UKF)
? ? ? 无迹卡尔曼滤波是一种基于无迹变换(Unscented Transformation)的非线性滤波方法。它通过选择一组确定的样本点(称为sigma点)来逼近非线性函数的概率分布,从而避免了线性化带来的误差。无迹卡尔曼滤波的滤波步骤包括预测和更新两个步骤。
预测步骤:
- 计算sigma点:根据k?1时刻的状态估计x^k?1?和协方差估计P^k?1?,计算sigma点。
- 预测sigma点:将sigma点代入状态方程g,得到预测的sigma点。
- 计算预测的均值和协方差:根据预测的sigma点,计算预测的均值μk∣k?1?和协方差Pk∣k?1?。
更新步骤:
- 计算观测sigma点:将预测的sigma点代入观测方程h,得到观测的sigma点。
- 计算观测的均值和协方差:根据观测的sigma点,计算观测的均值y^?k∣k?1?和协方差Pyy,k?。
- 计算互协方差:计算状态向量和观测向量之间的互协方差Pxy,k?。
- 计算卡尔曼增益:根据协方差和互协方差,计算卡尔曼增益Kk?。
- 更新状态估计和协方差估计:根据卡尔曼增益和观测残差,更新状态估计x^k?和协方差估计P^k?。
4.3 UKF在电池SoC估计中的应用
? ? ? ?在电池SoC估计中,我们可以将电池的SoC作为状态向量x,电池电流作为输入向量u,电池端电压作为观测向量y。然后,通过无迹卡尔曼滤波的预测和更新步骤,实时估计电池的SoC。
? ? ? ? 无迹卡尔曼滤波的优点是能够处理非线性系统的状态估计问题,同时避免了线性化带来的误差。然而,无迹卡尔曼滤波的性能也依赖于电池模型的准确性和参数的选择。
5.完整工程文件
v
文章来源:https://blog.csdn.net/hardware_player/article/details/135761014
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 逆置算法和数组循环移动算法
- 职场干货!谈谈AI时代必备的产品设计技能
- vue-cli创建项目,vue项目目录介绍
- w7数据库基础之mysql函数
- 大数据深度解析NLP文本摘要技术:定义、应用与PyTorch实战
- 前端架构师需要具备哪些能力?
- shell——变量
- 2024年10大指纹浏览器推荐,不踩雷浏览器盘点
- 定时器--JAVA
- 界面控件DevExpress WPF Dock组件,轻松创建类Visual Studio窗口界面!