teleop_twist_keyboard
发布时间:2024年01月11日
this package can adjust the speed of the robot to avoid robot drive too fast?
teleop_twist_keyboard
Generic Keyboard Teleoperation for ROS
Run
ros2 run teleop_twist_keyboard teleop_twist_keyboard
Publishing to a different topic (in this case?my_cmd_vel).
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=my_cmd_vel
Usage
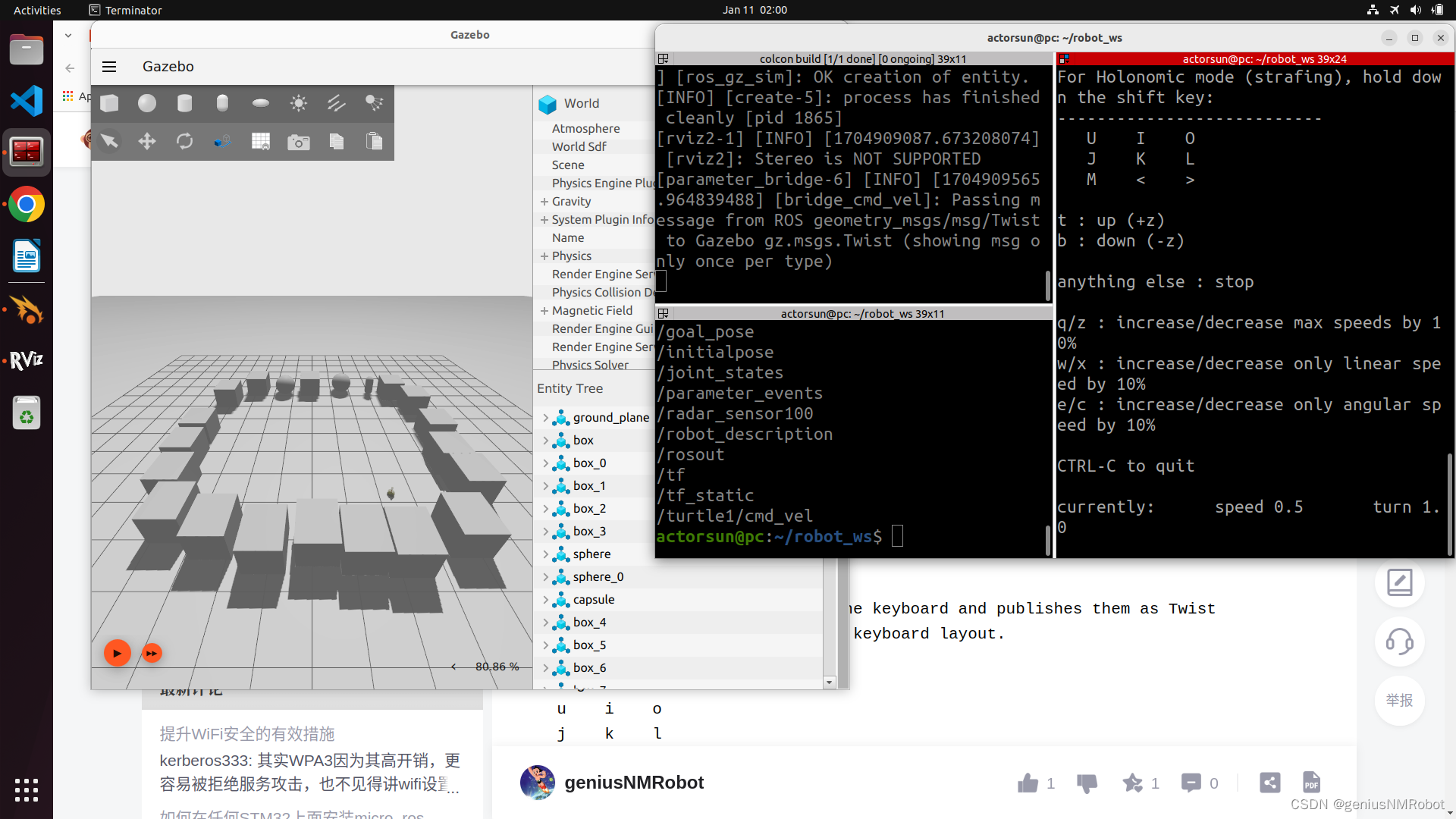
This node takes keypresses from the keyboard and publishes them as Twist messages. It works best with a US keyboard layout. --------------------------- Moving around: u i o j k l m , . For Holonomic mode (strafing), hold down the shift key: --------------------------- U I O J K L M < > t : up (+z) b : down (-z) anything else : stop q/z : increase/decrease max speeds by 10% w/x : increase/decrease only linear speed by 10% e/c : increase/decrease only angular speed by 10% CTRL-C to quit
Parameters
stamped (bool, default: false)- If false (the default), publish a?
geometry_msgs/msg/Twist?message. If true, publish a?geometry_msgs/msg/TwistStamped?message.
- If false (the default), publish a?
frame_id (string, default: '')- When?
stamped?is true, the frame_id to use when publishing the?geometry_msgs/msg/TwistStamped?message.
- When?
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135516509
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章