海思hi3516dv500陀螺仪防抖调试过程问题分析
发布时间:2024年01月18日
主要看cat /proc/umap/motionfusion
1、陀螺仪配置,使用在线零偏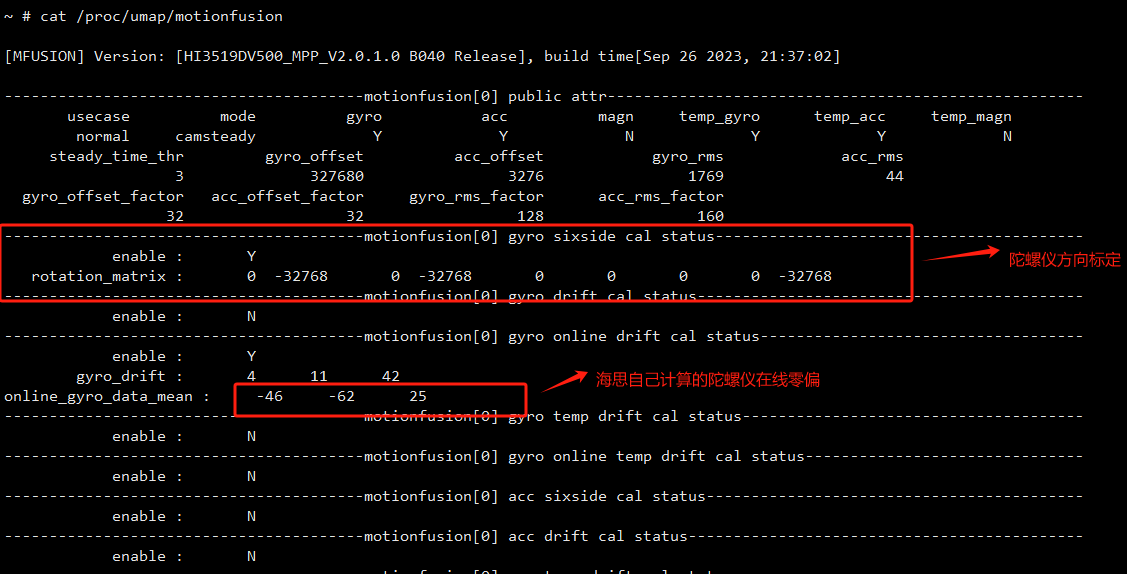
2、采集的陀螺仪数据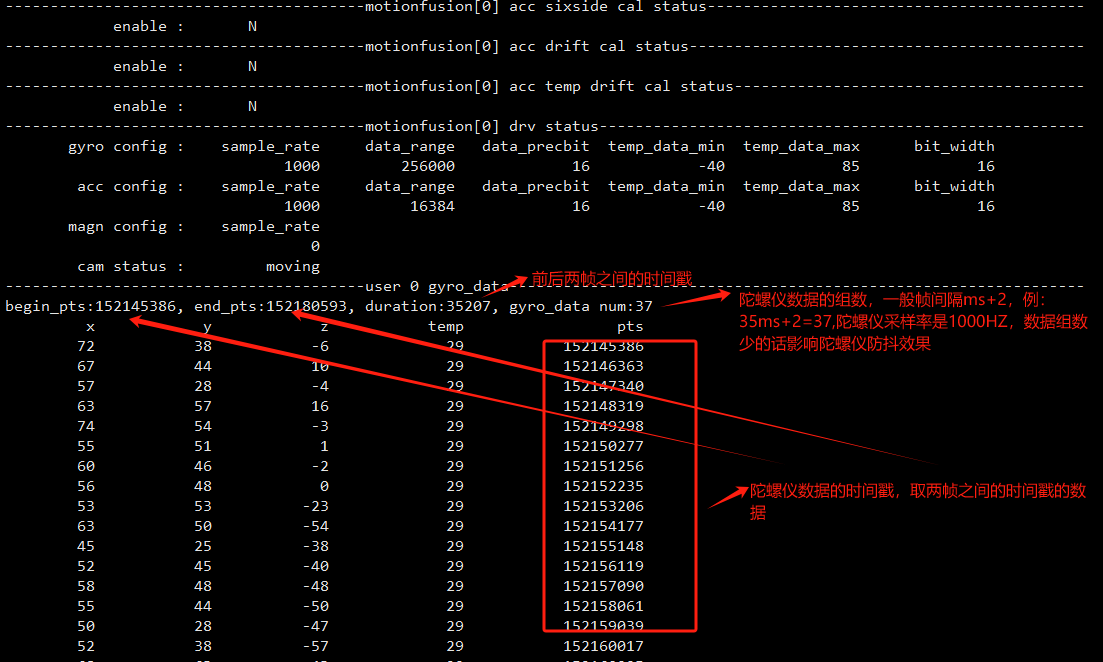
3、矫正之后的陀螺仪数据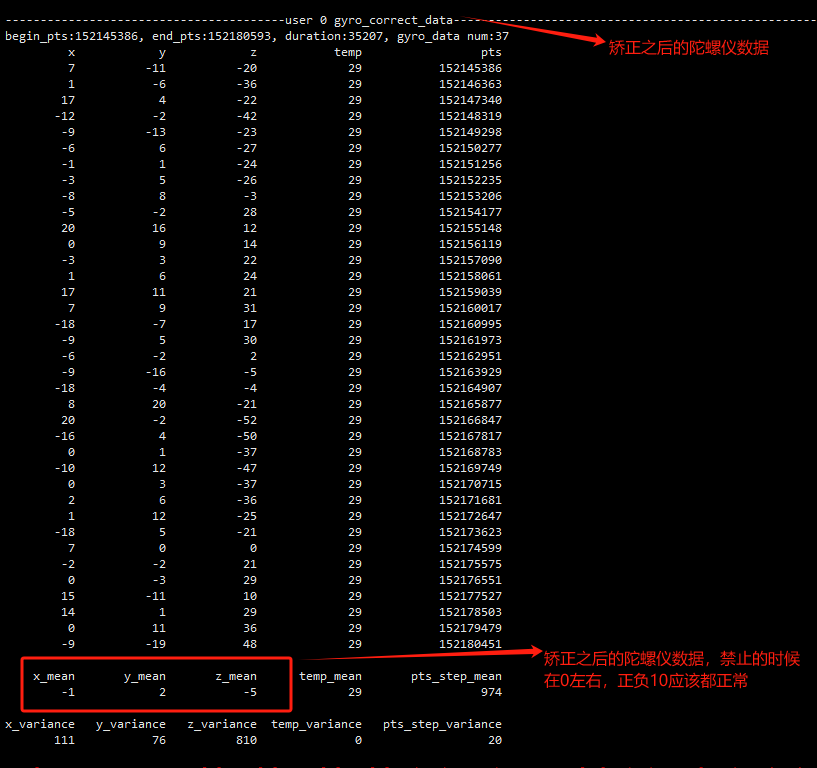
4、效果异常的情况下确认
1、镜头视场角是否异常
2、陀螺仪方向标定是否正常,正常的情况下矫正之后的数据在0上下震动
3、确认在线零偏是否正常,
4、防抖模式用的录像模式,record或者叫ipc
5、确认陀螺仪数据组数是否正常,
5.1,测试用的陀螺仪用的是 iim42652,用的fifo模式取数据,采样率为1000HZ的时候间隔时间为5ms一次,时间太长陀螺仪数据会缺失,这是针对hi3516dv500的获取数据的时候,不用的芯片不一样,根据厂家提供说明配置,测试的时候配的50ms一次,帧间隔33ms,每次智能取到一部分数据,后间隔50ms的数据还没取到
陀螺仪驱动中设置spi采集频率,间隔多久采样一次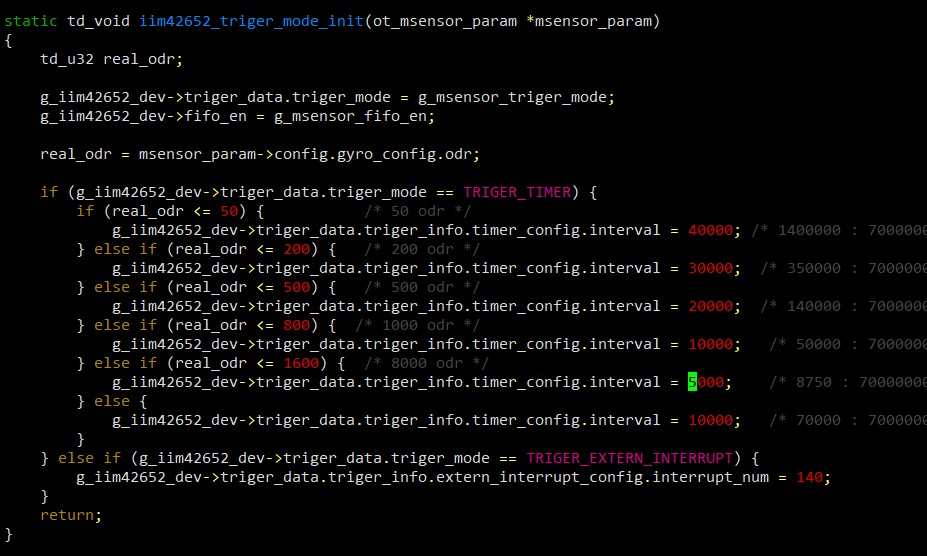 5.2 hi3516dv300在vi获取的陀螺仪数据,设置裁剪坐标之后在vpss做的裁剪
5.2 hi3516dv300在vi获取的陀螺仪数据,设置裁剪坐标之后在vpss做的裁剪
6、防抖效果尽量在曝光时间大于10ms的时候测,太小的话效果不佳
7、默认spi通信10M的通信数据,i2c的话数据低有可能数据拿到不及时
文章来源:https://blog.csdn.net/qq_18804879/article/details/135679336
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 分布式数据库Apache Doris简易体验
- centos7宿主机docker安装redis最新版本报错Reading the configuration file, at line 416 >>> ‘locale-collate “避坑(一)
- 固态硬盘多次重装系统很容易坏?长脑子了……
- 禅道(ZenTao)项目管理工具
- 三角函数诱导公式
- html基础2
- 计算机网络 第四章(网络层)【下】
- np.concatenate() 函数,NumPy 中用于连接(concatenate)数组的函数
- Java版商城:Spring Cloud+SpringBoot b2b2c实现多商家入驻直播带货及 免 费 小程序商城搭建的完整指南
- 【MySQL数据类型】