(超详细)7-YOLOV5改进-添加 CoTAttention注意力机制
发布时间:2024年01月20日
1、在yolov5/models下面新建一个CoTAttention.py文件,在里面放入下面的代码
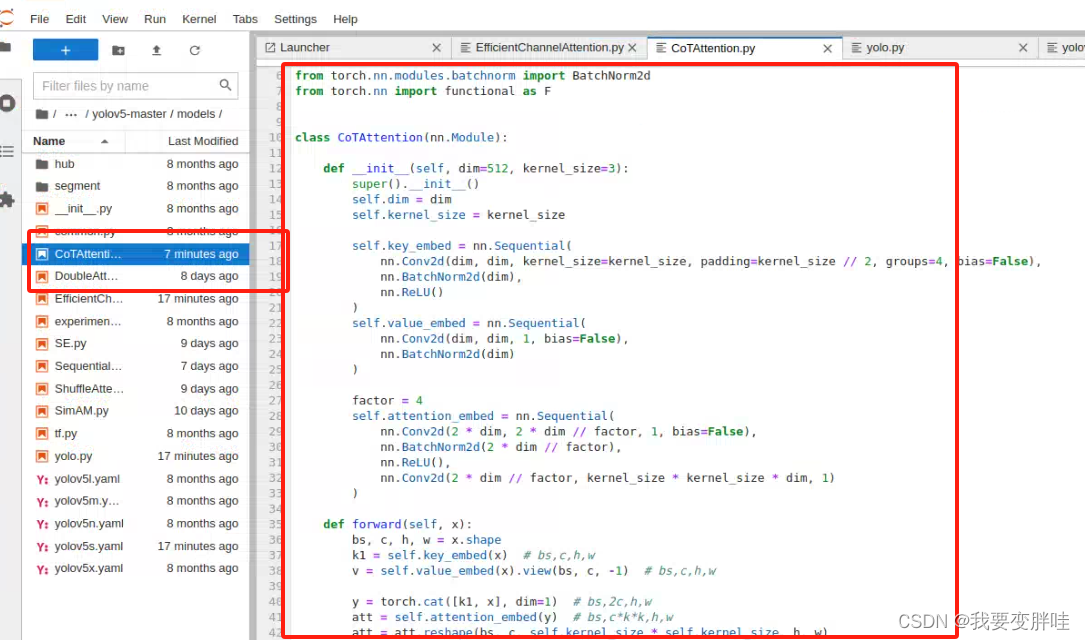
代码如下:
import numpy as np
import torch
from torch import flatten, nn
from torch.nn import init
from torch.nn.modules.activation import ReLU
from torch.nn.modules.batchnorm import BatchNorm2d
from torch.nn import functional as F
class CoTAttention(nn.Module):
def __init__(self, dim=512, kernel_size=3):
super().__init__()
self.dim = dim
self.kernel_size = kernel_size
self.key_embed = nn.Sequential(
nn.Conv2d(dim, dim, kernel_size=kernel_size, padding=kernel_size // 2, groups=4, bias=False),
nn.BatchNorm2d(dim),
nn.ReLU()
)
self.value_embed = nn.Sequential(
nn.Conv2d(dim, dim, 1, bias=False),
nn.BatchNorm2d(dim)
)
factor = 4
self.attention_embed = nn.Sequential(
nn.Conv2d(2 * dim, 2 * dim // factor, 1, bias=False),
nn.BatchNorm2d(2 * dim // factor),
nn.ReLU(),
nn.Conv2d(2 * dim // factor, kernel_size * kernel_size * dim, 1)
)
def forward(self, x):
bs, c, h, w = x.shape
k1 = self.key_embed(x) # bs,c,h,w
v = self.value_embed(x).view(bs, c, -1) # bs,c,h,w
y = torch.cat([k1, x], dim=1) # bs,2c,h,w
att = self.attention_embed(y) # bs,c*k*k,h,w
att = att.reshape(bs, c, self.kernel_size * self.kernel_size, h, w)
att = att.mean(2, keepdim=False).view(bs, c, -1) # bs,c,h*w
k2 = F.softmax(att, dim=-1) * v
k2 = k2.view(bs, c, h, w)
return k1 + k2
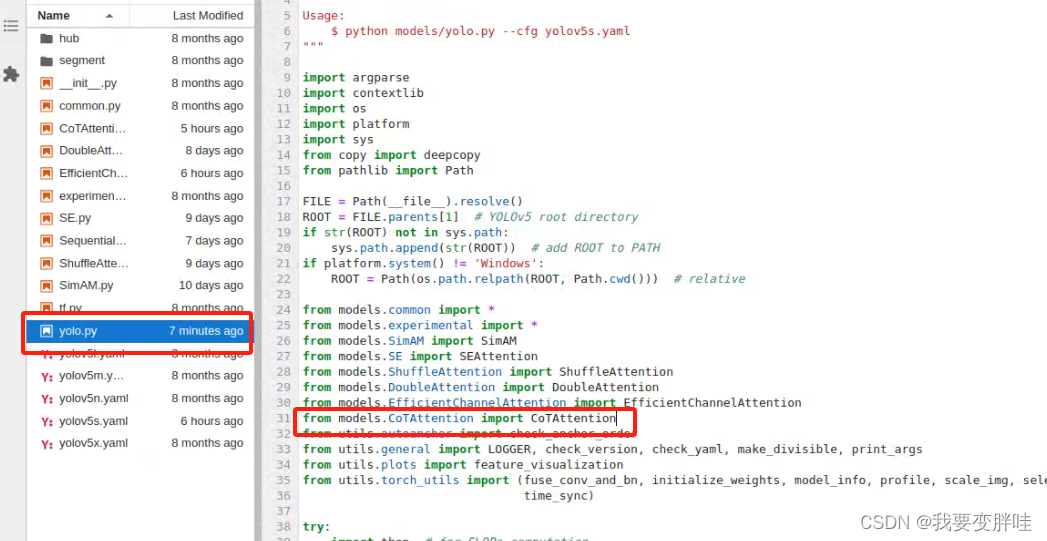
2、找到yolo.py文件,进行更改内容
在29行加一个from models.CoTAttention import CoTAttention, 保存即可
3、找到自己想要更改的yaml文件,我选择的yolov5s.yaml文件(你可以根据自己需求进行选择),将刚刚写好的模块CoTAttention加入到yolov5s.yaml里面,并更改一些内容。更改如下

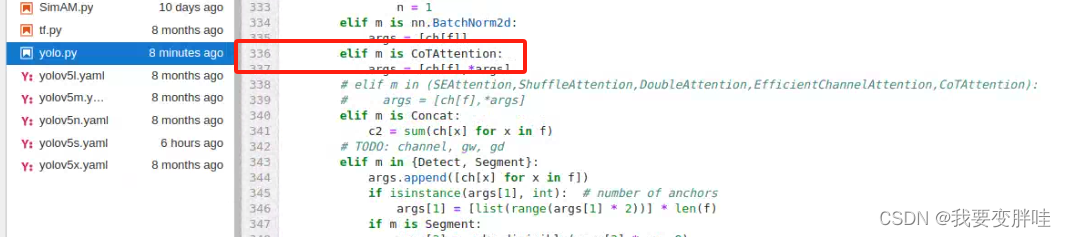
4、在yolo.py里面加入两行代码(335-337)
保存即可!
运行

文章来源:https://blog.csdn.net/qq_44421796/article/details/135712195
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- bug-ku--计算器
- Springboot整合MVC进阶篇
- 解决 GSYVideoPlayer 连续切换视频 出现黑屏只有声音没有画面的问题
- 微服务 Spring Cloud 10,如何追踪微服务调用?服务治理的常见手段
- Day24
- 8、反序列化漏洞(简述)
- 备赛笔记——2024全国职业院校技能大赛“大数据应用开发”赛项——任务2:离线数据处理
- 表达式计算
- React项目 路由懒加载 重定向
- Android Security PIN 相关代码