数据结构:图的存储和遍历
发布时间:2023年12月18日
图也是一种数据结构,在实际生活中有广泛运用,因此本篇总结的就是图的存储等
图的存储结构
在图中既有节点,也有边,因此要存储的就是节点和边的关系,节点的存储只需要放在一个数组中就可以,那边的存储是如何进行存储的?
邻接矩阵
利用一个二维数组来存储,对于任意一个不越界的下标i和j来说,arr[i][j]表示的是i和j这两个点之间的关系,如果是0表示的是从i到j没有关系,如果是1表示的是它们之间存在边
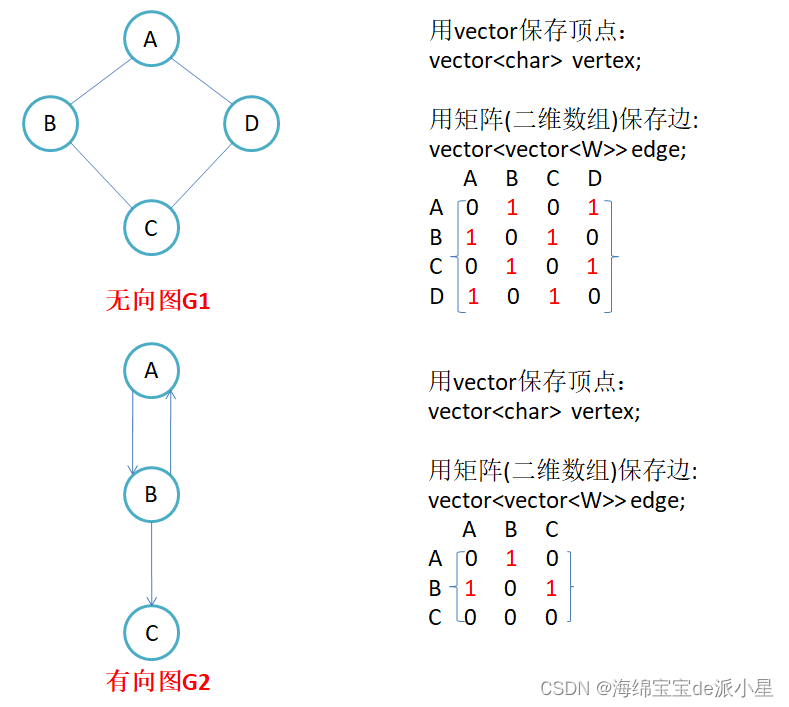
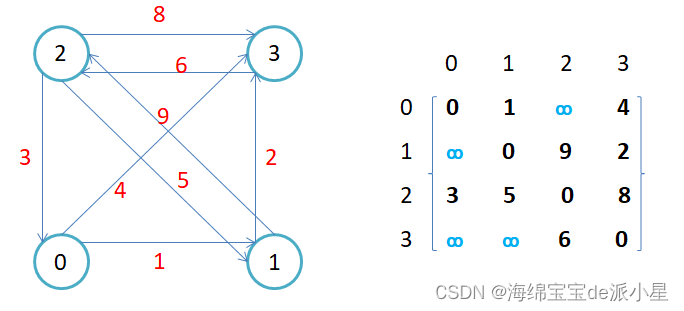
如果这个这个图是带有权值的,那么边的关系就使用权值来代替,如果顶点之间没有关系,就用无穷来表示即可
缺点
用邻接矩阵存储图的有点是能够快速知道两个顶点是否连通,缺陷是如果顶点比较多,边比较少时,矩阵中存储了大量的0成为系数矩阵,比较浪费空间,并且要求两个节点之间的路径不是很好求
邻接矩阵的存储模拟实现
// 顶点的类型,权值的类型,权值的最大值,是否是有向图
template<class V, class W, W W_MAX = INT_MAX, bool Direction = false>
class Graph
{
public:
Graph(const V* vertexs, size_t n)
{
// 建立顶点和下标的映射关系
for (size_t i = 0; i < n; i++)
{
_vertexs.push_back(vertexs[i]);
_vIndexMap[vertexs[i]] = i;
}
_matrix.resize(n, vector<W>(n, W_MAX));
}
// 给一个顶点取出来它对应的下标
size_t GetVertexsIndex(const V& vertex)
{
auto it = _vIndexMap.find(vertex);
if (it != _vIndexMap.end())
{
return it->second;
}
else
{
throw invalid_argument("不存在的顶点");
return -1;
}
}
// 给邻接矩阵加值
void _AddEdge(size_t srci, size_t dsti, W w)
{
_matrix[srci][dsti] = w;
if (Direction == false)
_matrix[dsti][srci] = w;
}
// 加边
void AddEdge(const V& src, const V& dst, W w)
{
size_t srci = GetVertexsIndex(src);
size_t dsti = GetVertexsIndex(dst);
_AddEdge(srci, dsti, w);
}
// 显示邻接矩阵
void Print()
{
// 打印顶点和下标映射关系
for (size_t i = 0; i < _vertexs.size(); ++i)
{
cout << _vertexs[i] << "-" << i << " ";
}
cout << endl << endl;
cout << " ";
for (size_t i = 0; i < _vertexs.size(); ++i)
{
cout << i << " ";
}
cout << endl;
// 打印矩阵
for (size_t i = 0; i < _matrix.size(); ++i)
{
cout << i << " ";
for (size_t j = 0; j < _matrix[i].size(); ++j)
{
if (_matrix[i][j] != W_MAX)
cout << _matrix[i][j] << " ";
else
cout << "#" << " ";
}
cout << endl;
}
cout << endl << endl;
// 打印所有的边
for (size_t i = 0; i < _matrix.size(); ++i)
{
for (size_t j = 0; j < _matrix[i].size(); ++j)
{
if (i < j && _matrix[i][j] != W_MAX)
{
cout << _vertexs[i] << "-" << _vertexs[j] << ":" <<
_matrix[i][j] << endl;
}
}
}
}
private:
// 下标到顶点的映射
vector<V> _vertexs;
// 邻接矩阵的存储
vector<vector<W>> _matrix;
// 顶点到下标的映射
map<V, size_t> _vIndexMap;
};
整体来说难度并不大,只是单纯的进行存储,注意map的使用是为了让顶点和下标建立一层映射,便于快速根据顶点可以定位到下标
邻接表
邻接表是另外一种图的存储形式,它适用于稀疏图,主要是借助链表来表示边和边的关系
无向图的存储
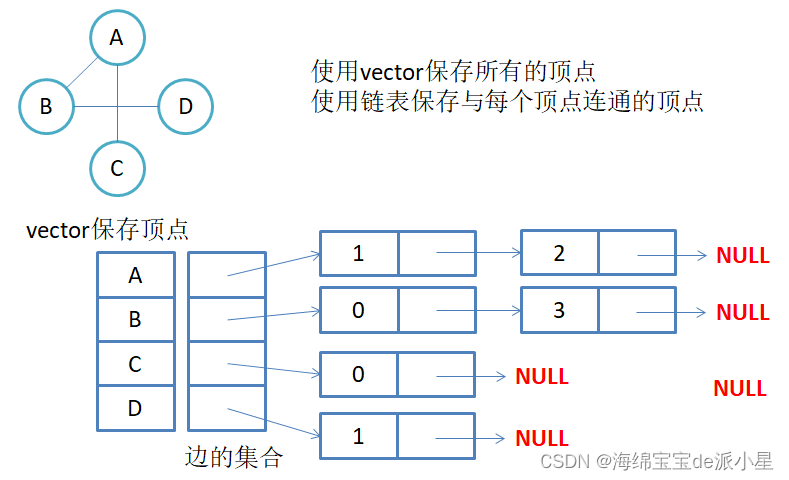
邻接表的好处也就体现出来了,想要知道A点和哪个点相连,遍历一下A所在的链表就可以知道了,而不需要在邻接矩阵中从头到尾进行遍历一次
有向图的存储

有了基本的原理支持,下面开始进行邻接表的模拟实现
邻接表的模拟实现
namespace list_table
{
// 对于边的结构来说,需要存储的有边的两个顶点,边的权值,以及链接属性
template <class W>
struct Edge
{
Edge() = default;
Edge(size_t srci, size_t dsti, W w)
:_srci(srci)
, _dsti(dsti)
, _w(w)
, _next(nullptr)
{}
size_t _srci;
size_t _dsti;
W _w;
Edge<W>* _next;
};
// 顶点的类型,权值的类型,权值的最大值,是否是有向图
template<class V, class W, bool Direction = false>
class Graph
{
typedef Edge<W> Edge;
public:
Graph() = default;
Graph(const V* vertexs, size_t n)
{
// 建立顶点和下标的映射关系
for (size_t i = 0; i < n; i++)
{
_vertexs.push_back(vertexs[i]);
_vIndexMap[vertexs[i]] = i;
}
_link_tables.resize(n, nullptr);
}
// 给一个顶点取出来它对应的下标
size_t GetVertexsIndex(const V& vertex)
{
auto it = _vIndexMap.find(vertex);
if (it != _vIndexMap.end())
{
return it->second;
}
else
{
throw invalid_argument("不存在的顶点");
return -1;
}
}
// 给邻接表加值
void _AddEdge(size_t srci, size_t dsti, W w)
{
// 创建一个边的结构
Edge* EdgePtr = new Edge(srci, dsti, w);
Edge* tail = _link_tables[srci];
while (tail && tail->_next)
tail = tail->_next;
// 把这个边的结构头插链入到邻接表
if (tail == nullptr)
{
_link_tables[srci] = EdgePtr;
}
else
{
tail->_next = EdgePtr;
tail = tail->_next;
}
}
// 加边
void AddEdge(const V& src, const V& dst, W w)
{
size_t srci = GetVertexsIndex(src);
size_t dsti = GetVertexsIndex(dst);
_AddEdge(srci, dsti, w);
// 如果是无向图,就把对应的边也加到邻接表中
if (Direction == false)
{
_AddEdge(dsti, srci, w);
}
}
// 显示邻接矩阵
void Print()
{
// 打印顶点和下标映射关系
for (size_t i = 0; i < _vertexs.size(); ++i)
{
cout << _vertexs[i] << "-" << i << " ";
}
cout << endl;
cout << endl;
// 打印邻接表
for (size_t i = 0; i < _link_tables.size(); ++i)
{
cout << i << " ";
Edge* cur = _link_tables[i];
while (cur)
{
cout << "[" << cur->_srci << "->" << cur->_dsti << "]" << "w->" << cur->_w << " ";
cur = cur->_next;
}
cout << endl;
cout << endl;
}
cout << endl << endl;
}
private:
// 下标到顶点的映射
vector<V> _vertexs;
// 邻接表的存储
vector<Edge*> _link_tables;
// 顶点到下标的映射
map<V, size_t> _vIndexMap;
};
}
图的遍历
图的遍历主要有深度优先和广度优先,关于这两个遍历已经在之前的文章中总结过了,下面直接对这两个方法进行实现,这里是利用邻接矩阵进行遍历
DFS和BFS遍历
// 图的BFS遍历,从某个顶点开始遍历
void BFS(const V& Vertex)
{
queue<V> qe;
qe.push(Vertex);
size_t d = 1;
vector<bool> visited(_matrix.size(), false);
while (!qe.empty())
{
size_t dsize = qe.size();
cout << Vertex << "的" << d << "度好友:";
while (dsize--)
{
V front = qe.front();
qe.pop();
size_t index = GetVertexsIndex(front);
visited[index] = true;
for (size_t i = 0; i < _matrix.size(); i++)
{
if (_matrix[index][i] != W_MAX && visited[i] == false)
{
//找到了
visited[i] = true;
cout << _vertexs[i] << " ";
qe.push(_vertexs[i]);
}
}
}
cout << endl;
d++;
}
}
// 图的DFS遍历,从某个顶点开始遍历
void DFS(const V& Vertex)
{
size_t index = GetVertexsIndex(Vertex);
vector<bool> visited(_vertexs.size(), false);
_DFS(index, visited);
}
void _DFS(size_t index, vector<bool>& visited)
{
visited[index] = true;
cout << _vertexs[index] << " ";
for (size_t i = 0; i < _vertexs.size(); i++)
{
if (_matrix[index][i] != W_MAX && visited[i] == false)
{
_DFS(i, visited);
}
}
}
图的存储结构和遍历的实现
#include <iostream>
#include <vector>
#include <map>
#include <queue>
#include <stack>
using namespace std;
namespace matrix
{
// 顶点的类型,权值的类型,权值的最大值,是否是有向图
template<class V, class W, W W_MAX = INT_MAX, bool Direction = false>
class Graph
{
public:
Graph(const V* vertexs, size_t n)
{
// 建立顶点和下标的映射关系
for (size_t i = 0; i < n; i++)
{
_vertexs.push_back(vertexs[i]);
_vIndexMap[vertexs[i]] = i;
}
_matrix.resize(n, vector<W>(n, W_MAX));
}
// 给一个顶点取出来它对应的下标
size_t GetVertexsIndex(const V& vertex)
{
auto it = _vIndexMap.find(vertex);
if (it != _vIndexMap.end())
{
return it->second;
}
else
{
throw invalid_argument("不存在的顶点");
return -1;
}
}
// 给邻接矩阵加值
void _AddEdge(size_t srci, size_t dsti, W w)
{
_matrix[srci][dsti] = w;
if (Direction == false)
_matrix[dsti][srci] = w;
}
// 加边
void AddEdge(const V& src, const V& dst, W w)
{
size_t srci = GetVertexsIndex(src);
size_t dsti = GetVertexsIndex(dst);
_AddEdge(srci, dsti, w);
}
// 显示邻接矩阵
void Print()
{
// 打印顶点和下标映射关系
for (size_t i = 0; i < _vertexs.size(); ++i)
{
cout << _vertexs[i] << "-" << i << " ";
}
cout << endl << endl;
cout << " ";
for (size_t i = 0; i < _vertexs.size(); ++i)
{
cout << i << " ";
}
cout << endl;
// 打印矩阵
for (size_t i = 0; i < _matrix.size(); ++i)
{
cout << i << " ";
for (size_t j = 0; j < _matrix[i].size(); ++j)
{
if (_matrix[i][j] != W_MAX)
cout << _matrix[i][j] << " ";
else
cout << "#" << " ";
}
cout << endl;
}
cout << endl << endl;
// 打印所有的边
for (size_t i = 0; i < _matrix.size(); ++i)
{
for (size_t j = 0; j < _matrix[i].size(); ++j)
{
if (i < j && _matrix[i][j] != W_MAX)
{
cout << _vertexs[i] << "-" << _vertexs[j] << ":" <<
_matrix[i][j] << endl;
}
}
}
}
// 图的BFS遍历,从某个顶点开始遍历
void BFS(const V& Vertex)
{
queue<V> qe;
qe.push(Vertex);
size_t d = 1;
vector<bool> visited(_matrix.size(), false);
while (!qe.empty())
{
size_t dsize = qe.size();
cout << Vertex << "的" << d << "度好友:";
while (dsize--)
{
V front = qe.front();
qe.pop();
size_t index = GetVertexsIndex(front);
visited[index] = true;
for (size_t i = 0; i < _matrix.size(); i++)
{
if (_matrix[index][i] != W_MAX && visited[i] == false)
{
//找到了
visited[i] = true;
cout << _vertexs[i] << " ";
qe.push(_vertexs[i]);
}
}
}
cout << endl;
d++;
}
}
// 图的DFS遍历,从某个顶点开始遍历
void DFS(const V& Vertex)
{
size_t index = GetVertexsIndex(Vertex);
vector<bool> visited(_vertexs.size(), false);
_DFS(index, visited);
}
void _DFS(size_t index, vector<bool>& visited)
{
visited[index] = true;
cout << _vertexs[index] << " ";
for (size_t i = 0; i < _vertexs.size(); i++)
{
if (_matrix[index][i] != W_MAX && visited[i] == false)
{
_DFS(i, visited);
}
}
}
private:
// 下标到顶点的映射
vector<V> _vertexs;
// 邻接矩阵的存储
vector<vector<W>> _matrix;
// 顶点到下标的映射
map<V, size_t> _vIndexMap;
};
}
namespace list_table
{
// 对于边的结构来说,需要存储的有边的两个顶点,边的权值,以及链接属性
template <class W>
struct Edge
{
Edge() = default;
Edge(size_t srci, size_t dsti, W w)
:_srci(srci)
, _dsti(dsti)
, _w(w)
, _next(nullptr)
{}
size_t _srci;
size_t _dsti;
W _w;
Edge<W>* _next;
};
// 顶点的类型,权值的类型,权值的最大值,是否是有向图
template<class V, class W, bool Direction = false>
class Graph
{
typedef Edge<W> Edge;
public:
Graph() = default;
Graph(const V* vertexs, size_t n)
{
// 建立顶点和下标的映射关系
for (size_t i = 0; i < n; i++)
{
_vertexs.push_back(vertexs[i]);
_vIndexMap[vertexs[i]] = i;
}
_link_tables.resize(n, nullptr);
}
// 给一个顶点取出来它对应的下标
size_t GetVertexsIndex(const V& vertex)
{
auto it = _vIndexMap.find(vertex);
if (it != _vIndexMap.end())
{
return it->second;
}
else
{
throw invalid_argument("不存在的顶点");
return -1;
}
}
// 给邻接表加值
void _AddEdge(size_t srci, size_t dsti, W w)
{
// 创建一个边的结构
Edge* EdgePtr = new Edge(srci, dsti, w);
Edge* tail = _link_tables[srci];
while (tail && tail->_next)
tail = tail->_next;
// 把这个边的结构头插链入到邻接表
if (tail == nullptr)
{
_link_tables[srci] = EdgePtr;
}
else
{
tail->_next = EdgePtr;
tail = tail->_next;
}
}
// 加边
void AddEdge(const V& src, const V& dst, W w)
{
size_t srci = GetVertexsIndex(src);
size_t dsti = GetVertexsIndex(dst);
_AddEdge(srci, dsti, w);
// 如果是无向图,就把对应的边也加到邻接表中
if (Direction == false)
{
_AddEdge(dsti, srci, w);
}
}
// 显示邻接矩阵
void Print()
{
// 打印顶点和下标映射关系
for (size_t i = 0; i < _vertexs.size(); ++i)
{
cout << _vertexs[i] << "-" << i << " ";
}
cout << endl;
cout << endl;
// 打印邻接表
for (size_t i = 0; i < _link_tables.size(); ++i)
{
cout << i << " ";
Edge* cur = _link_tables[i];
while (cur)
{
cout << "[" << cur->_srci << "->" << cur->_dsti << "]" << "w->" << cur->_w << " ";
cur = cur->_next;
}
cout << endl;
cout << endl;
}
cout << endl << endl;
}
private:
// 下标到顶点的映射
vector<V> _vertexs;
// 邻接表的存储
vector<Edge*> _link_tables;
// 顶点到下标的映射
map<V, size_t> _vIndexMap;
};
}
文章来源:https://blog.csdn.net/qq_73899585/article/details/134974002
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 常用API(String,StringBuilder,StringJoiner)
- 数据结构-如何巧妙实现一个栈?逐步解析与代码示例
- Shell脚本-bin/bash: 解释器错误: 没有那个文件或目录-完整路径执行-“/”引发的脑裂
- linux shell脚本 基础认识
- 群脉冲预防方案的基本原则?|深圳比创达电子
- 驱动芯片是什么?
- docker gitlab14.4.2-14.10.5升级过程记录
- 分支定界简述
- 综合执法vr数字化虚拟教学更安全、有序
- Thread