斯坦福Mobile ALOHA机器人(智能佳)爆火!会烹饪、洗衣等多项家务功能
最近,斯坦福大学 Mobile ALOHA 机器人炒菜的视频和文章火出了圈!虽然机器人技术日新月异,能做菜早已是意料之中的事情,但把这么多技术集成到一起,用廉价的机械臂做出了丝滑的动作,还能够洗衣做饭,摆放桌椅板凳,效果真的是太惊艳了!
Mobile ALOHA 机器人主要有两组主控开源机械手臂和两组随从开源手臂以及一套自主移动开发平台构成,每组手臂都有六个自由关节和二指滑动夹爪。开发人员通过手眼协调双手灵活控制两组主控手臂,来训练和纠正随从机械臂的自主学习和进化协同精度,通过这种端到端训练模型,可实现机械手臂精细化控制,为双臂协作机械手臂低成本大规模高质量协同运用提供巨大的价值。
北京智能佳科技有限公司作为 TROSSEN 公司中国区代理商,不仅提供原装开发平台,还为部分软硬件做了优化处理,使得结构件更加稳定结实,具体请咨询www.bjrobot.com。

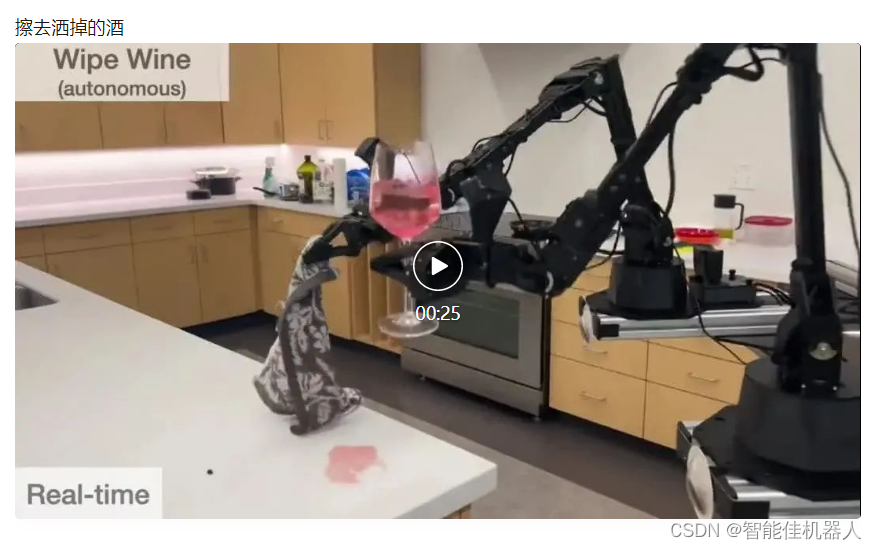
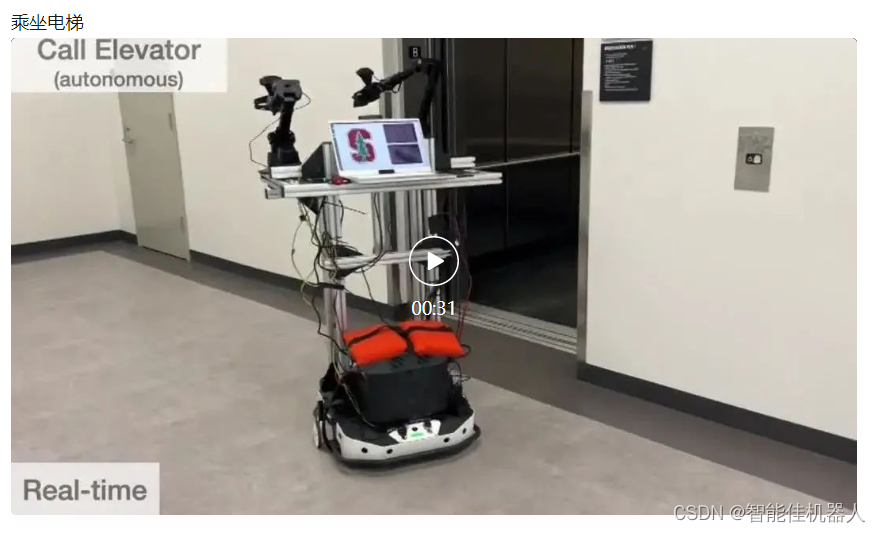
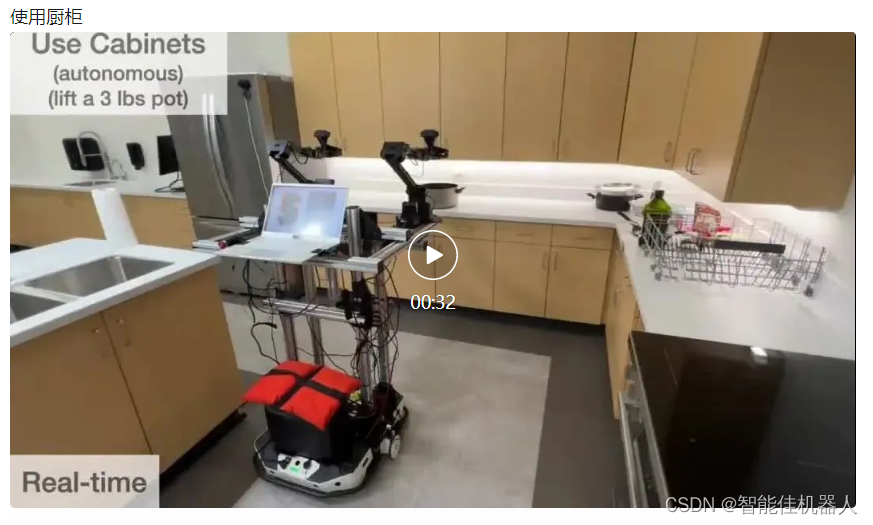
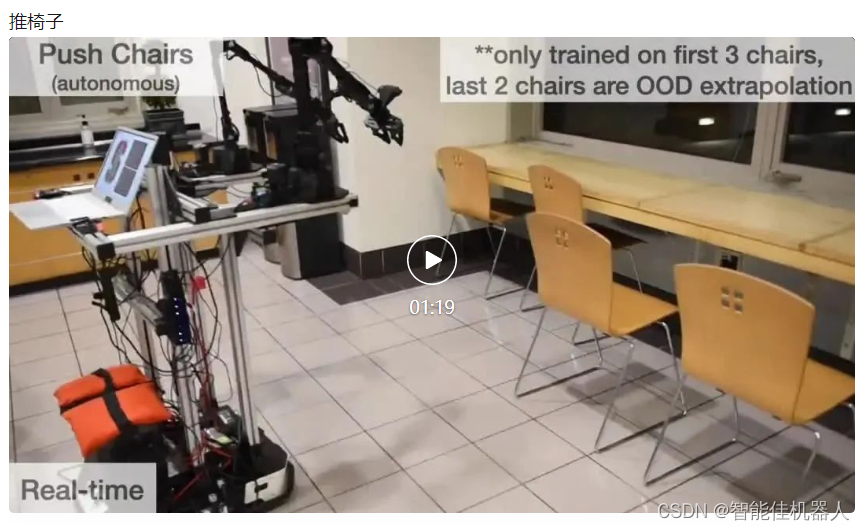
从人类示范的模仿学习在机器人技术中表现出了令人印象深刻的性能。然而,大多数结果集中在桌面操作,缺乏一般有用的任务所必需的流动性和灵巧性。在这项工作中,斯坦福华人团队开发了一个系统,模仿移动操作任务是双手的,需要全身控制。首先提出了移动ALOHA,一个低成本和全身遥操作系统的数据收集。它增强了ALOHA系统的移动基地,和一个全身遥操作接口。然后,进行监督行为克隆,并发现与现有的静态ALOHA数据集的联合训练提高了移动操作任务的性能。每个任务有50个演示,协同训练可以将成功率提高高达90%,使移动ALOHA能够自主完成复杂的移动操作任务,如炒菜和上菜,打开橱柜来存放沉重的烹饪锅,用厨房的水龙头轻轻冲洗用过的锅。


Mobile ALOHA机器人特点:
1. 是一款开源、灵巧、性价比高的远程操作平台;
2. 软硬件双开源,提供相应的开发案例和3D加工件;
3. 提供大量相关的数据接口,可以在平台基础上训练和开发更多更优的应用;
4. 具备商用化的可实施性;
随着科技的飞速发展,机器人技术如今已深入到我们生活的方方面面。最近,斯坦福的研究团队推出了家务机器人和炒菜机器人,引发了广泛关注。不仅展现了机器人技术的最新成果,更预示着家务劳动即将进入一个全新的时代。
北京智能佳科技有限公司是一家以教育机器人和服务机器人为主的国内最早专业从事机器人研发与销售的公司。公司通过十余年的发展,拥有自己一支经验丰富的研发队伍,下面视频中可以看到我们的技术人员对ALOHA研究!


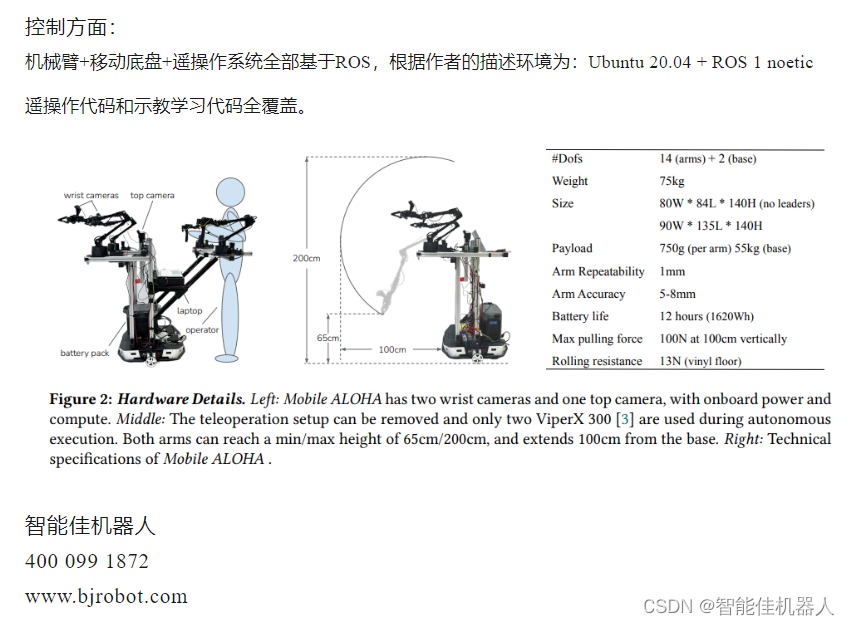
硬件方面:
硬件BOM表可以看出这套系统主要有TROSSEN的六自由度轻量级桌面机械臂+ZNJ夹持器+定制化移动底座,其中,两个机械臂用于遥操作示教,另外两个机械臂用于执行。


ViperX 300机械手臂
ViperX 300 6DOF机械手臂是Interbotix一个新的手臂系列,其特点是配有X系列舵机智能伺服舵机。与以前的DYNAMIXEL伺服舵机相比,X系列舵机以小巧的外形提供了更高的扭矩,更有效的散热和更好的耐用性。
ViperX 300 6DOF机械手臂中的DYNAMIXEL
XM540-W270和DYNAMIXEL XM430-W350 伺服系统提供了4096高分辨率和用户可定义的PID参数。用户也可以访问温度监控,位置反馈以及电压水平,负载和一致性设置。
ViperX 300 6DOF的核心是Robotis DYNAMIXEL U2D2,可轻松访问DYNAMIXEL向导软件和ROS。ViperX 300提供6个自由度和360度完整旋转。

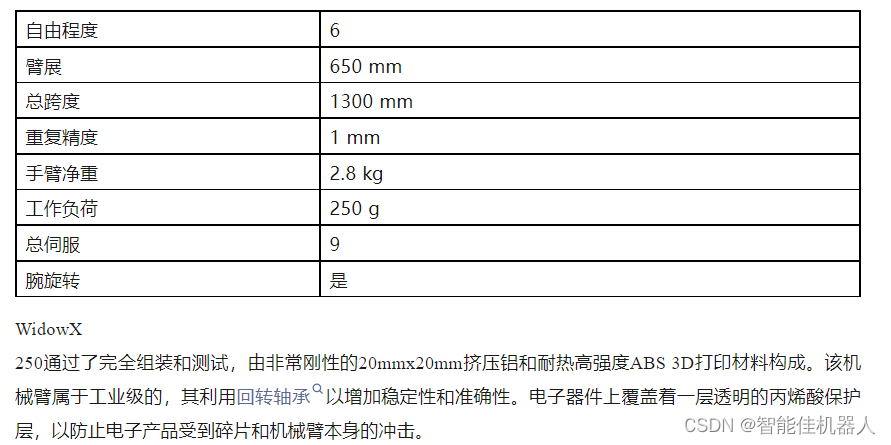
ViperX 300 6DOF 通过全面测试和组装,由极其坚固的20mm x 40mm挤压铝铝支架制成。该臂位于工业级轴承上,以增加稳定性。电子设备上覆盖有透明的丙烯酸护罩,以防止电子设备受到碎屑以及机械臂本身的冲击。
WidowX 250机械臂6DOF
WidowX250机器人手臂属于Interbotix的一个新系列,具有DYNAMIXEL X系列智能伺服电机。与以前的DYNAMIXEL伺服系统相比,X系列执行器具有更高的扭矩、更高效的散热和更好的耐用性。DYNAMIXEL XM-430-W350T和DYNAMIXEL XL430-W250-T伺服系统提供4096个位置的高分辨率和用户可定义的PID参数。温度监测,位置反馈,以及电压水平,负荷和符合性设置,也是用户可访问的。
WidowX 250的核心是Robotis DYNAMIXEL U2D2,它可以方便地访问DYNAMIXEL向导软件和ROS。WidowX 250提供6自由度和360度全方位旋转。
手腕旋转升级后选用XM430-W350T取代伺服夹持器后面的XL430-W250T伺服增加了旋转强度和精度。

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 11 HAL库的硬件I2C驱动SI7006和AP3216C
- webIDE表单标签以及包含选择器的使用
- Python 常用模块re
- C++的拷贝赋值函数
- 认购申购基金时手续费的计算
- 关于 GPT,你知道多少?
- 基于SSM+JSP的订餐管理系统的设计与实现
- Java 运算符
- Spring Cloud 使用 Mysql8.0 踩坑解决
- CyberLink的视频编辑软件PowerDirector Ultimate 2024 22.0版本在win系统下载与安装配置