ros2/ros 4轮2驱机器人xacro/urdf文件示例代码
发布时间:2023年12月18日
?这个实验中最重要的是:colcon build 之后要记得source install/setup.bash.否则修改的文件是不会更新的。知道了吧

<robot name="half" xmlns:xacro="http://wiki.ros.org/wiki/xacro">
<xacro:property name="PI" value="3.1415926"/><!--定义一个变量PI,后边用来调用的-->
<xacro:property name="base_footprint_radius" value="0.001"/>
<xacro:property name="base_radius" value="0.1"/>
<xacro:property name="base_length" value="0.08"/>
<xacro:property name="ground_clearance" value="0.015"/>
<material name="black">
<color rgba="0.3 0.3 0.0 0.5"/>
</material> <!--注意了这个不能少-->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${base_footprint_radius}"/>
</geometry>
</visual>
</link>
<link name="base">
<visual>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0"/>
<material name="yellow">
<color rgba="0.3 0.3 0.0 0.5"/>
</material>
</visual>
</link>
<joint name="base2base_footprint" type="fixed">
<parent link="base_footprint"/>
<child link="base"/>
<origin xyz="0 0 ${ground_clearance+base_length/2}"/>
</joint>
<xacro:property name="wheel_radius" value="0.0325"/>
<xacro:property name="wheel_length" value="0.015"/>
<xacro:macro name="add_wheel" params="name flag">
<link name="${name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI/2} 0 0"/>
<material name="black"/>
</visual>
</link>
<joint name="${name}_wheel2base" type="continuous">
<parent link="base"/>
<child link="${name}_wheel"/>
<origin xyz="0 ${flag*base_radius} ${-(ground_clearance+base_length/2-wheel_radius)}"/>
<axis xyz="0 1 0"/>
</joint>
</xacro:macro>
<xacro:add_wheel name="left" flag="1"/>
<xacro:add_wheel name="right" flag="-1"/>
<xacro:property name="support_wheel_radius" value="0.0075">
</xacro:property>
<xacro:macro name="add_support_wheel" params="name flag">
<link name="${name}_wheel">
<visual>
<geometry>
<sphere radius="${support_wheel_radius}"/>
</geometry>
<origin xyz="0 0 0" rpy="0.0 0.0 0.0"/>
<material name="black">
</material>
</visual>
</link>
<joint name="${name}_wheel2base" type="continuous">
<parent link="base"/>
<child link="${name}_wheel"/>
<origin xyz="${flag*(base_radius-support_wheel_radius)} 0 ${-(base_length/2+ground_clearance/2)}"/>
<axis xyz="1 1 1"/>
</joint>
</xacro:macro>
<xacro:add_support_wheel name="front" flag="1"/>
<xacro:add_support_wheel name="back" flag="-1"/>
</robot>?上述代码中的:<material name="black">
? ? ? ? <color rgba="0.3 0.3 0.0 0.5"/>
? ? ? </material>
这段代码不能少,(虽然说少了也可以,但是不正常了)
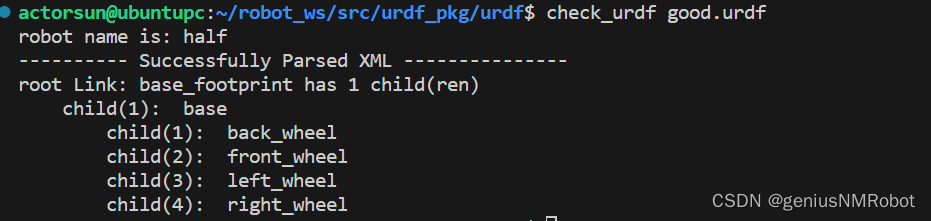
不少之后没有任何错误,说明符合urdf文件,xacro文件规范。
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135073435
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- (delphi11最新学习资料) Object Pascal 学习笔记---第2章第五节(日期和时间)
- 黑马——Java学生管理系统
- Python学习之复习MySQL-Day1(DDL)
- 基于@FeignClient注解实现两个微服务之间接口的调用(简单)
- 如何能得到RWS证书?
- drf之认证
- GoZero微服务个人探究之路(六)GoZero中的rpc、rmq、api和admin的区别
- 【Linux】进程周边004之进程的调度与切换(领略Linux系统进程调度算法的神奇)
- 【算法练习】leetcode算法题合集之排序篇
- 对caffe跑前向后生成的预测文件画ROC曲线