格密码基础:光滑参数
目录
一. 铺垫高斯函数
定义高斯密度函数如下:
进一步形成新的高斯密度函数:
注意此处的函数输入为N维,也就是。根据高斯函数对长度的限制,可得:
二. 光滑参数图形理解
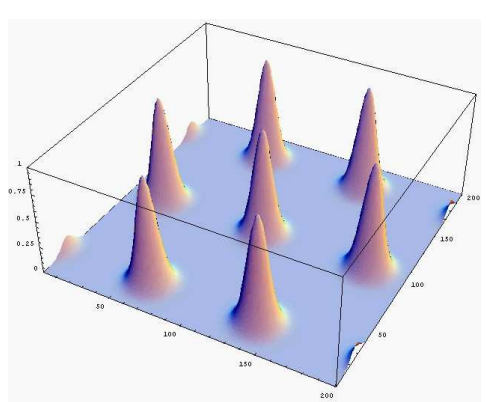
首先,我们均匀选择一些格点,以二维为例子,这些格点处对应的概率大致相等。接着,我们把每个格点外加一个高斯噪声,可得:
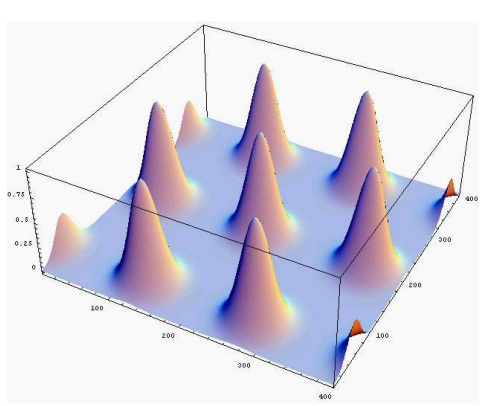
当我们增大高斯噪声的方差,图形会变成:
如果继续增大高斯噪声会出现:
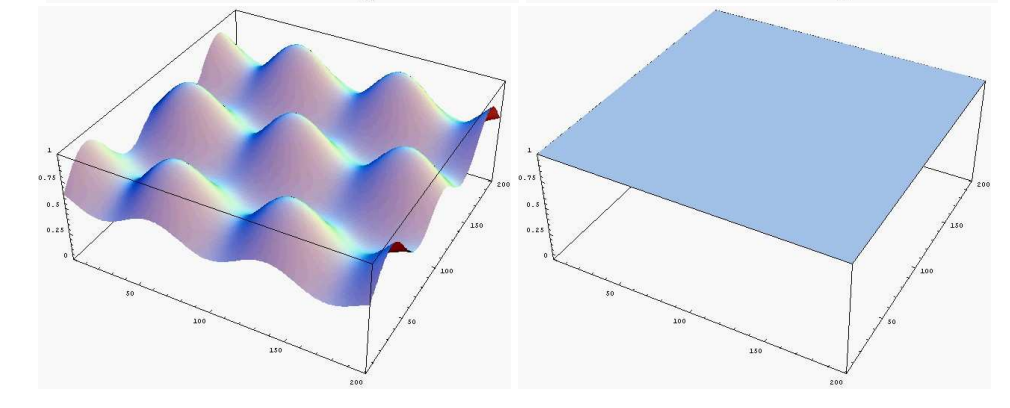
很明显当s越来越大后,图形会越来越接近均匀分布。在网络安全中,均匀分布非常重要,格的光滑参数就是研究当s取多大时,此均匀分布会出现。
三. 光滑参数与格基本区
3.1 高斯与均匀分布的统计距离
格的格基记为B,格基本区写做P(B),基本区上的均匀分布为:
对偶格的行列式与格的行列式互为倒数,所以可得:
高斯函数记为,将高斯函数中的每个点都 模基本区(mod P(B)),可以得到新的函数分布:

第一个等号:Y(x)分布的意义,与x在模基本区下相等;
第二个等号:与
之间的关系,另外基本区内的点加上所有的格点,可以遍历整个扩展空间内的点;
利用泊松求和公式以及傅里叶变换的性质,对分布Y(x)进一步运算可得:
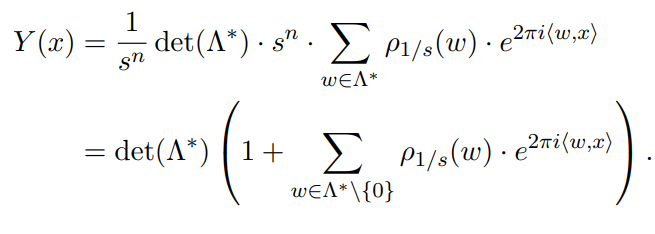
如果有人感兴趣这一步的证明,欢迎留言,以后可以补上。
现在我们来计算新得到的分布Y(x)与均匀分布U(x)之间的统计距离,如下:

取该距离的上限,基本区的体积记为格行列式的值,再带入Y(x)的表达式,可得:
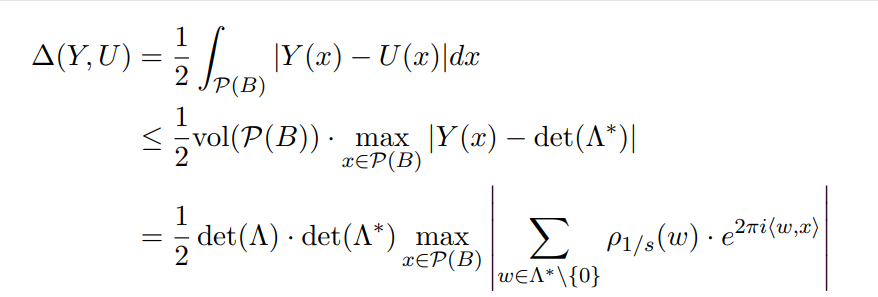
指数的取值不会超过1,对偶格的行列式与格的行列式互为倒数,进一步化简可得:
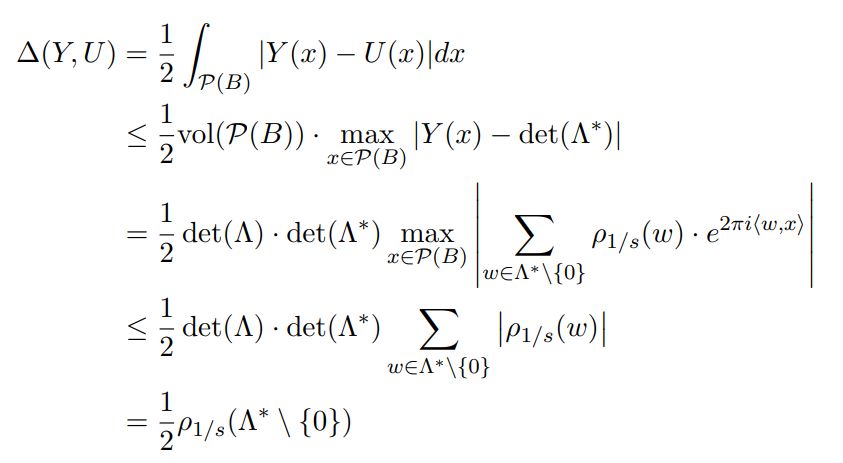
将以上,总结为形式化的定义可得:

3.2 光滑参数理解
以上讨论告诉我们:
最小的s,使其满足:
对应的s就被称之为格的光滑参数,记作
很明显,当s越来越小时,越来越大,也就是:
当s越来越大时,越来越小,也就是:
所以可以把看成关于s的函数,并且该函数为连续型且严格单调递减的函数。
以下理解非常重要。
也就是说,当高斯函数的标准差s大于光滑参数时,也就是:
可得高斯函数与均匀分布之间的距离最多为
(注意两个分布均定义在基本区P(B)上)。光滑参数是连接高斯分布与均匀分布很好的桥梁。
四. 光滑参数与最短向量
当时,可得光滑参数的下界:
证明:
令高斯分布的参数s等于对偶格最短向量的倒数,于是:
令y代表对偶格的最短向量,也就是:
带入运算可得:

证明完毕。
五. 光滑参数与连续最小值
结合转移定理(Banaszczyk transference theorem),以上定理可得:
当时,可得光滑参数的下界:
六. 光滑参数与对偶格的上界
当,可得光滑参数的上界:
证明:
令高斯分布的参数s等于:
带入高斯分布中运算可得:

第一个等号:高斯函数的性质;
第二个不等号:对偶格的性质
所以可得:
证明完毕。
七. 光滑参数与格的上界
当,可得光滑参数的上界:
利用转移定理结合上一个性质即可证明。
其实这个界还不够紧致,实际上,当时,光滑参数的上界为:
八. 小结
格理论的研究起源于 17-19 世纪, 数学家 Kepler 和 Gaussian 研究在低维空间中堆放等半径的小球,当所有球的球心构成一个格时,计算得出了堆积球密度的最大值。 在19 世纪中叶,Minkowski 和 Hermit 等数学家逐渐发展了格堆积理论和格覆盖理论。 计算球的最大格堆积密度相当于在格点中求解最短向量问题(Shortest Vector Problem, SVP) , 计算球的最小覆盖密度相当于在格点中求解最近格点问题(Closest Vector Problem, CVP), 两者都是格密码的核心数学难题。
1998 年, Ajtai 证明了SVP在范数下,当近似因子小于
时是 NP-Hard 的, 即不存在多项式时间的算法可以求解近似版本 SVP(Approximate Shortest Vector Problem,?
)。在保证SVP在
和
范数下是NP-hard的同时,计算出近似因子的上界为
和
。2003年,Dinur等计算出当近似因子为
时,近似版本 CVP(Approximate Closest Vector Problem)是 NP-hard 的。
算法复杂性理论研究基于求解问题所要花费的时间、 空间资源(比特数、 带数、 逻辑门数) 等。 通过考察求解某个问题的不同算法复杂程度来衡量问题的难易程度. 由此将问题划分为不同的类型:
| 经典复杂性分类 | 定义 |
| P | 确定型 单带图灵机在多项式时间内可判定的语言类 |
| NP | 某个非确定型多项式时间图灵机判定的语言类 |
| NPC | NP 问题子集, 可以通过多项式时间算法归约到一个 NP 问题上 |
格上困难问题是计算复杂性理论的重要研究内容, 基于格的密码方案的可证明安全性依赖格上问题的难解度, 格上许多困难问题在目前已被证明是NP难的, 其中包括最短线性无关向量问题(SIVP) , 短整数解问题(SIS) 。 SIVP 问题和 SIS 问题都可以归约到格上最差情况的困难问题, 所以有些格密码方案是基于上述困难问题设定,其在标准模型下该网络安全方案是具有抗量子的特效。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 多元高斯分布:条件分布推导
- 测试boost::exception_test::throw_test_exception<T>的程序
- Java基本数据类型boolean占用几个字节?
- 七、Qt 信号和槽
- LeetCode 1531. 压缩字符串 II【动态规划】2575
- 电脑文件误删除如何恢复?这3个实用方法记得收藏!
- Elasticsearch 8.10之前同义词最佳实践
- WGCLOUD快速部署方案 - 批量给Linux安装agent
- 删除文件夹及文件夹下的文件夹和文件
- Go语言开发利器:几种主流IDE的优势与应用