【数字图像处理】水平翻转、垂直翻转
图像翻转是常见的数字图像处理方式,分为水平翻转和垂直翻转。本文主要介绍 FPGA 实现图像翻转的基本思路,以及使用紫光同创 PGL22G 开发板实现数字图像水平翻转、垂直翻转的过程。

目录
1 水平翻转与垂直翻转
? ? ? ? 在数字图像处理中,图像翻转是指将图像进行水平或者垂直方向的翻转,使其呈现不同的效果,分为水平翻转和垂直翻转。
????????水平翻转是将图像沿着水平轴线进行翻转,将左半部分和右半部分进行交换。垂直翻转则是将图像沿着垂直轴线进行翻转,将上部分和下部分进行交换。
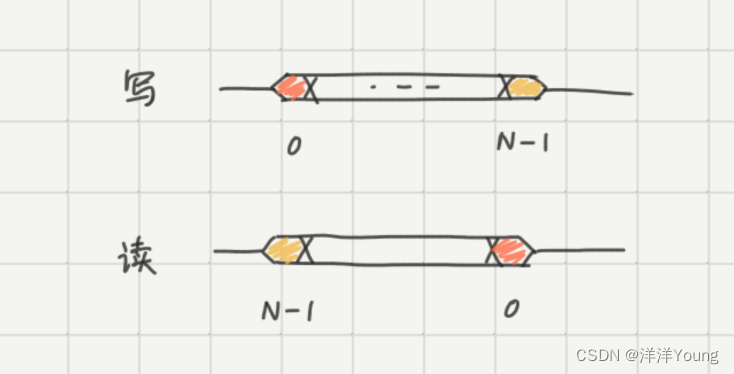
? ? ? ? 使用 FPGA 实现水平翻转时,由于每次向 DDR3 写入一行数据,因此可以借助写 DDR3 之前的 Dual-port RAM,将一行数据进行翻转,实现水平翻转的功能。FPGA 逻辑设计的大致思路是:写 Dual-port RAM 时,写地址从 0 增加;读 Dual-port RAM 写 DDR3 时,读地址从最大值逐步减小到 0 结束。?
? ? ? ? 对于垂直翻转功能,则需要借助 DDR3 来实现。像素数据第 1 行写到第 N 行的位置,第 2 行写到第 N-1 行的位置,以此类推。FPGA 逻辑设计的大致思路是:每一行数据写入 DDR3 时,用图像高度减去原来的行地址,作为新的行地址。

2 FPGA 布署与实现
2.1 功能与指标定义
? ? ? ? 使用紫光同创 FPGA 平台实现图像翻转功能,FPGA 需要实现的功能与指标如下:
(1)与电脑的串口通信,用于接收上位机下发的图像数据,波特率为 256000 Bd/s;
(2)水平翻转与图像翻转:借助 Dual-port RAM 与 DDR3,分别实现水平翻转与垂直翻转功能;
(3)DDR3 读写控制,将处理前后的图像数据分别写入 DDR3 的不同区域,实现图像的拼接;
(4)HDMI 输出,输出一路?HDMI 信号源,用于将拼接后的图像显示在外接显示器上,分辨率为 1024×768。
2.2 逻辑设计
????????图像翻转工程主要的设计模块层次与功能说明如下:
| 模块名称 | 功能说明 | |
| top_uart | uart_rx_slice | 串口接收驱动模块 |
| uart_rx_parse | 串口数据解析模块,从上位机接收 8bit 原始图像 | |
| top_vidin | vidin_pipeline | pipeline 单元模块,缓存两行图像数据,并将数据提交到 ddr3 数据调度模块 |
| merge_out | dvi_timing_gen | HDMI 视频时序产生模块 |
| dvi_ddr_rd | 根据 HDMI 控制信号,提交读指令到 ddr3 数据调度模块 | |
| dvi_encoder | HDMI 输出编码(8b10b 编码)与输出驱动模块 | |
其中,vidin_pipeline 模块实现图像翻转功能,代码如下:
`timescale 1 ns/ 1 ps
`include "../ddr_scheduler/ddr_parameter.vh"
module vidin_pipeline (
// System level
sys_rst,
sys_clk,
ddr_init_done,
flip_lr,
flip_ud,
// pipeline input ports
pipeline_in_info,
pipeline_in_data,
pipeline_in_wren,
pipeline_in_end,
// pipeline output ports
pipeline_out_info,
pipeline_out_data,
pipeline_out_vld,
pipeline_out_end,
// User defined ports for ddr_scheduler
ddr_wr_baseaddr,
ddr_wr_addr,
ddr_wr_priority,
ddr_wr_burstsize,
ddr_wr_req,
ddr_wr_ack,
ddr_wr_end,
ddr_wr_rden,
ddr_wr_q,
ddr_wr_mask
);
// IO direction/register definitions
input sys_rst;
input sys_clk;
input ddr_init_done;
input flip_lr;
input flip_ud;
input [31:0] pipeline_in_info;
input [31:0] pipeline_in_data;
input pipeline_in_wren;
input pipeline_in_end;
output [31:0] pipeline_out_info;
output [31:0] pipeline_out_data;
output pipeline_out_vld;
output pipeline_out_end;
input [`DDR_A_W-1:0] ddr_wr_baseaddr;
output [`DDR_A_W-1:0] ddr_wr_addr;
output ddr_wr_priority;
output [`DDR_BURST_W-1:0] ddr_wr_burstsize;
output ddr_wr_req;
input ddr_wr_ack;
input ddr_wr_end;
input ddr_wr_rden;
output [`DDR_D_W-1:0] ddr_wr_q;
output [`DDR_D_W/8-1:0] ddr_wr_mask;
reg [31:0] pipeline_out_info;
reg [31:0] pipeline_out_data;
reg pipeline_out_vld;
reg pipeline_out_end;
// internal signal declarations
reg [`DDR_CMD_W-1:0] ddr_cmd_data;
reg ddr_cmd_vld;
reg [9:0] blk_mem_waddr;
reg [31:0] blk_mem_wdata;
reg blk_mem_wren;
reg [9:0] blk_mem_raddr;
wire [31:0] blk_mem_rdata;
reg blk_mem_rden;
reg blk_mem_rd_busy;
reg blk_mem_rd_end;
reg blk_mem_rd_vld;
// line_buffer_inst: Dual-port ram for line pixel data buffer
blk_mem_1024x32b line_buffer_inst (
.wr_data (blk_mem_wdata ), // input 32-bit
.wr_addr (blk_mem_waddr ), // input 10-bit
.wr_en (blk_mem_wren ), // input 1-bit
.wr_clk (sys_clk ), // input 1-bit
.wr_rst (sys_rst ), // input 1-bit
.rd_addr (blk_mem_raddr ), // input 10-bit
.rd_data (blk_mem_rdata ), // output 32-bit
.rd_clk (sys_clk ), // input 1-bit
.rd_rst (sys_rst ) // input 1-bit
);
// End of line_buffer_inst instantiation
always @(posedge sys_rst or posedge sys_clk) begin
if (sys_rst) begin
blk_mem_waddr <= {10{1'b0}};
blk_mem_wdata <= {32{1'b0}};
blk_mem_wren <= 1'b0;
end
else begin
blk_mem_wdata <= pipeline_in_data;
blk_mem_wren <= pipeline_in_wren;
// Use ping-pong storage here
if (pipeline_in_end)
blk_mem_waddr <= {~blk_mem_waddr[9], {9{1'b0}}};
else if (pipeline_in_wren)
blk_mem_waddr <= {blk_mem_waddr[9], blk_mem_waddr[0+:9]+1'b1};
end
end
always @(posedge sys_rst or posedge sys_clk) begin
if (sys_rst) begin
blk_mem_raddr <= {10{1'b0}};
blk_mem_rden <= 1'b0;
blk_mem_rd_busy <= 1'b0;
blk_mem_rd_end <= 1'b0;
blk_mem_rd_vld <= 1'b0;
end
else begin
if (~blk_mem_rd_busy && pipeline_in_end) begin
blk_mem_rd_busy <= 1'b1;
if (flip_lr == 1'b0)
blk_mem_raddr <= {blk_mem_raddr[9], {9{1'b0}}};
else
blk_mem_raddr <= {blk_mem_raddr[9], {9{1'b1}}};
end
else if (blk_mem_rd_busy) begin
// Use ping-pong storage here
if (flip_lr == 1'b0) begin
if (& blk_mem_raddr[0+:9])
blk_mem_raddr <= {~blk_mem_raddr[9], {9{1'b0}}};
else
blk_mem_raddr <= {blk_mem_raddr[9], blk_mem_raddr[0+:9]+1'b1};
end
else begin
if (blk_mem_raddr[0+:9] == 0)
blk_mem_raddr <= {~blk_mem_raddr[9], {9{1'b1}}};
else
blk_mem_raddr <= {blk_mem_raddr[9], blk_mem_raddr[0+:9]-1'b1};
end
// Pull down read busy flag
if (flip_lr == 1'b0) begin
if (& blk_mem_raddr[0+:9])
blk_mem_rd_busy <= 1'b0;
end
else begin
if (blk_mem_raddr[0+:9] == 0)
blk_mem_rd_busy <= 1'b0;
end
end
blk_mem_rden <= blk_mem_rd_busy;
blk_mem_rd_vld <= blk_mem_rden;
if (blk_mem_rd_busy) begin
if (flip_lr == 1'b0) begin
if (& blk_mem_raddr[0+:9])
blk_mem_rd_end <= 1'b1;
else
blk_mem_rd_end <= 1'b0;
end
else begin
if (blk_mem_raddr[0+:9] == 0)
blk_mem_rd_end <= 1'b1;
else
blk_mem_rd_end <= 1'b0;
end
end
else
blk_mem_rd_end <= 1'b0;
end
end
always @(posedge sys_rst or posedge sys_clk) begin
if (sys_rst) begin
pipeline_out_info <= {32{1'b0}};
pipeline_out_data <= {32{1'b0}};
pipeline_out_vld <= 1'b0;
pipeline_out_end <= 1'b0;
end
else begin
if (pipeline_in_end)
pipeline_out_info <= pipeline_in_info;
pipeline_out_data <= blk_mem_rdata;
pipeline_out_vld <= blk_mem_rd_vld;
pipeline_out_end <= blk_mem_rd_end;
end
end
/
always @(posedge sys_rst or posedge sys_clk) begin
if (sys_rst) begin
ddr_cmd_data <= {`DDR_CMD_W{1'b0}};
ddr_cmd_vld <= 1'b0;
end
else begin
if (pipeline_in_end) begin
ddr_cmd_data[32+:`DDR_BURST_W] <= 8'h7F; // used fixed size here, 512 /4 -1 = 127
if (flip_ud == 1'b0)
ddr_cmd_data[0+:28] <= {pipeline_in_info[0+:16], 12'd0};
else
ddr_cmd_data[0+:28] <= {16'd383-pipeline_in_info[0+:16], 12'd0};
end
if (blk_mem_rd_end)
ddr_cmd_vld <= 1'b1;
else
ddr_cmd_vld <= 1'b0;
end
end
// vid_ddr_wr_inst: ddr write control module
vid_ddr_wr vid_ddr_wr_inst (
.sys_rst (sys_rst ), // input 1-bit
.sys_clk (sys_clk ), // input 1-bit
.ddr_init_done (ddr_init_done ), // input 1-bit
.vid_cmd_data (ddr_cmd_data ), // input 40-bit
.vid_cmd_vld (ddr_cmd_vld ), // input 1-bit
.vid_img_data (blk_mem_rdata ), // input 32-bit
.vid_img_data_vld (blk_mem_rd_vld ), // input 1-bit
.ddr_wr_baseaddr (ddr_wr_baseaddr ), // input 27-bit
.ddr_wr_addr (ddr_wr_addr ), // output 27-bit
.ddr_wr_priority (ddr_wr_priority ), // output 1-bit
.ddr_wr_burstsize (ddr_wr_burstsize ), // output 8-bit
.ddr_wr_req (ddr_wr_req ), // output 1-bit
.ddr_wr_ack (ddr_wr_ack ), // input 1-bit
.ddr_wr_end (ddr_wr_end ), // input 1-bit
.ddr_wr_rden (ddr_wr_rden ), // input 1-bit
.ddr_wr_q (ddr_wr_q ), // output 128-bit
.ddr_wr_mask (ddr_wr_mask ) // output 16-bit
);
// End of vid_ddr_wr_inst instantiation
endmodule
2.3 上板调试
????????使用 PyQt5 和 OpenCV 库编写上位机程序,通过串口发送原始图像数据,以及水平翻转、垂直翻转参数。
# -*- Coding: UTF-8 -*-
import cv2
import sys
import struct
import numpy as np
from PyQt5 import Qt, QtGui, QtCore, QtWidgets, QtSerialPort
class mainWindow(Qt.QWidget):
def __init__(self, com_port, parent=None):
super(mainWindow, self).__init__(parent)
self.setFixedSize(530, 384)
self.setWindowTitle("PGL OpenCV Tool")
self.flip_horizontal = False
self.flip_vertical = False
# 创建标签与按钮
self.img_widget = QtWidgets.QLabel()
self.btn1 = QtWidgets.QPushButton("打开")
self.btn1.clicked.connect(self.getfile)
self.btn2 = QtWidgets.QPushButton("关闭")
self.btn2.clicked.connect(self.close)
self.btn3 = QtWidgets.QPushButton("水平翻转")
self.btn3.clicked.connect(self.flip_lr)
self.btn4 = QtWidgets.QPushButton("垂直翻转")
self.btn4.clicked.connect(self.flip_ud)
# 创建布局
centralLayout = QtWidgets.QVBoxLayout()
centralLayout.addWidget(self.img_widget)
bottomLayout = QtWidgets.QHBoxLayout()
bottomLayout.addWidget(self.btn1)
bottomLayout.addWidget(self.btn2)
bottomLayout.addWidget(self.btn3)
bottomLayout.addWidget(self.btn4)
centralLayout.addLayout(bottomLayout)
self.setLayout(centralLayout)
# 串口对象
self.COM = QtSerialPort.QSerialPort()
self.COM.setPortName(com_port)
self.COM.setBaudRate(256000)
self.open_status = False
self.row_cnt = 0
self.img = None
self.timer = QtCore.QTimer()
self.timer.timeout.connect(self.sendImage)
self.startup()
def startup(self):
"""Write code here to run once"""
for com_port in QtSerialPort.QSerialPortInfo.availablePorts():
print(com_port.portName())
# Try open serial port
if not self.COM.open(QtSerialPort.QSerialPort.ReadWrite):
self.open_status = False
print("Open Serial Port failed.")
else:
self.open_status = True
def flip_lr(self):
"""水平翻转回调函数"""
if self.flip_horizontal == False:
self.flip_horizontal = True
self.btn3.setStyleSheet("QPushButton{color:rgb(128,128,255)}")
else:
self.flip_horizontal = False
self.btn3.setStyleSheet("QPushButton{color:rgb(0,0,0)}")
def flip_ud(self):
"""垂直翻转回调函数"""
if self.flip_vertical == False:
self.flip_vertical = True
self.btn4.setStyleSheet("QPushButton{color:rgb(128,128,255)}")
else:
self.flip_vertical = False
self.btn4.setStyleSheet("QPushButton{color:rgb(0,0,0)}")
def getfile(self):
"""获取图像路径"""
fname = QtWidgets.QFileDialog.getOpenFileName(self, 'Open file',
'C:\\Users\\Administrator\\Pictures', "Image files(*.jpg *.png)")
self.clipImage(fname[0])
self.updateImage()
self.sendImage()
def clipImage(self, fname):
"""读取并裁剪图片至512x384大小"""
if fname:
img = cv2.imread(fname, cv2.IMREAD_COLOR)
img_roi = img[:384,:512,:]
print(img_roi.shape)
cv2.imwrite('./img_roi.png', img_roi)
def updateImage(self):
"""显示裁剪后的图像"""
self.img_widget.setPixmap(QtGui.QPixmap('./img_roi.png'))
self.img = cv2.imread('./img_roi.png')
if self.open_status:
self.timer.start(100)
def sendImage(self):
"""通过串口发送图片"""
pattern = ">2BH{:d}B".format(512*3)
# 获取图像翻转信息
flip_flag = 0x00
if self.flip_horizontal:
flip_flag = flip_flag + 0x10
if self.flip_vertical:
flip_flag = flip_flag + 0x01
# 发送图像数据
if self.open_status:
if self.row_cnt == 384+3:
self.row_cnt = 0
self.timer.stop()
else:
args1 = [0x55, flip_flag, self.row_cnt]
args2 = [rgb for rgb in self.img[(self.row_cnt % 384),:].reshape(-1)]
send_data = struct.pack(pattern, *(args1+args2))
self.row_cnt += 1
self.COM.write(send_data)
def closeEvent(self, event):
super().closeEvent(event)
#self.slider_window.close()
# 定时器停止
self.timer.stop()
if self.open_status:
self.COM.close() # 关闭串口
def main():
app = QtWidgets.QApplication(sys.argv)
window = mainWindow('COM21')
window.show()
#for win in (window, window.slider_window):
# win.show()
sys.exit(app.exec_())
if __name__ == "__main__":
main()

????????连接 HDMI 线和串口线,选择与发送图像,就可以看到?FPGA 的处理效果了。以下是水平翻转效果。

以下是垂直翻转效果。

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【分享】7-Zip软件如何压缩文件?
- 递归和尾递归(用C语言解斐波那契和阶乘问题)
- 【线性代数】两个向量组等价,其中一个向量组线性无关,另一个向量组也是线性无关吗?
- 使用Vscode远程debug报错找不到Module找不到File
- Aigtek高压放大器使用注意事项及要求有哪些
- 基于ssm的高校班级同学录网站设计与实现+jsp论文
- 「 典型安全漏洞系列 」03.跨站请求伪造CSRF详解
- php 的运算符
- 图床功能轻松上手:Python教程带你实现图片的快速分享!
- 怎么使用5118站长工具API接口处理采集数据