ros2 学习08 topic 话题定义及示例
topic 在ros 中的作用
节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系方式就是话题,它是节点间传递数据的桥梁。
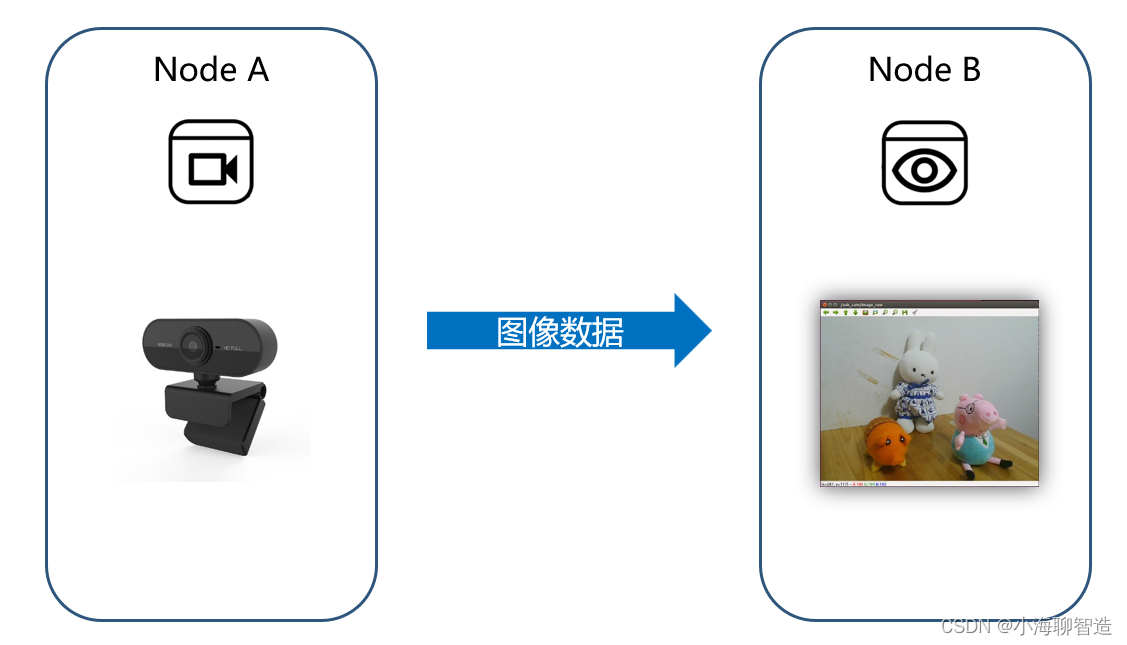
大家可以想一下,这两个节点是不是必然存在某种关系?没错,节点A要将获取的图像数据传输给节点B,有了数据,节点B才能做这样可视化的渲染。
此时从节点A到节点B传递图像数据的方式,在ROS中,我们就称之为话题,它作为一个桥梁,实现了节点之间某一个方向上的数据传输。
发布/订阅模型
从话题本身的实现角度来看,使用了基于DDS的发布/订阅模型,什么叫发布和订阅呢?

话题数据传输的特性是从一个节点到另外一个节点,发送数据的对象称之为发布者,接收数据的对象称之为订阅者,每一个话题都需要有一个名字,传输的数据也需要有固定的数据类型。
多对多通信

大家再仔细想下这些可以订阅的东西,是不是并不是唯一的,我们每个人可以订阅很多公众号、报纸、杂志,这些公众号、报纸、杂志也可以被很多人订阅,没错,ROS里的话题也是一样,发布者和订阅者的数量并不是唯一的,可以称之为是多对多的通信模型。
因为话题是多对多的模型,发布控制指令的摇杆可以有一个,也可以有2个、3个,订阅控制指令的机器人可以有1个,也可以有2个、3个,大家可以想象一下这个画面,似乎还是挺魔性的,如果存在多个发送指令的节点,建议大家要注意区分优先级,不然机器人可能不知道该听谁的了。
示例:自定义话题消息发布和订阅
了解了话题的基本原理,接下来我们就要开始编写代码啦。

还是从Hello World例程开始,我们来创建一个发布者,发布话题“chatter”,周期发送“Hello World”这个字符串,消息类型是ROS中标准定义的String,再创建一个订阅者,订阅“chatter”这个话题,从而接收到“Hello World”这个字符串。
如果我们想要实现一个发布者和订阅者,主要流程如下:
- 创建功能包
- 在功能包下新增发布者代码
- 在功能包下新增订阅者代码
- 修改功能包下setup.py 的脚本文件
- 编译
- 运行测试
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 自养号测评:如何成为亚马逊、wish卖家提升销量的得力助手?
- 数学建模算法0基础学习第五天-插值算法
- 自动循环采集全站文章
- SpringMVC之获取请求参数和域对象共享数据
- 验证集和测试集之间的区别是什么?
- Java SE:实现学生管理系统
- Java技术栈 —— Hadoop入门(一)
- 题记(3)--连通图的判断
- Qt/QML编程学习之心得:QProcess进程创建(27)
- 用python批量合并word文件并统一调整图片大小