学习笔记-李沐动手学深度学习(三)(10-11,隐藏层、多层感知机、激活函数、模型超参数选择、欠过拟合)
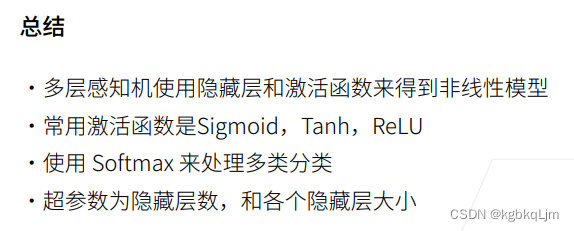
总结
多体会(宏观、哲学)
【深度学习的核心】首先是要模型足够大,在此基础上通过各种手段 来控制模型容量,使得最终得到较小的泛化误差
【一般深度学习特指神经网络 这一块】
【学习的核心是要学习 本质上不变的那些核心思想,如欠过拟合、数据集怎么弄、训练误差泛化误差等等,因为很可能过几年有新的语言、新的技术出现。整个工科本质上都差不多,从某个方向深入学习到精髓,很容易向其他工科迁移】
世界上有三种东西:
艺术:我做了一件事,但我也不知道怎么解释,我觉得这样好看点
工程:我做的事情可以通过实际来验证,都可以通过定理来描述
科学:去理解为什么
深度学习(神经网络)一开始是艺术(我有个想法 且 也能work,得想个理由如何解释,虽然 暂时也不知道如何解释是最合理的),但只要你能work,总有人帮你找到理由去解释为何work(此即engineer的任务)
比如蒸汽机先出现,解释蒸汽机的原理的物理学知识是100年后才出来的,有一定的滞后性
【多层感知机】经验:网络是宽点好(即 隐藏层数少,每个隐藏层比较宽)还是深点好(有多个隐藏层)
一般来说 多隐藏层时, 前面到后面 隐藏层宽度越来越小
(即
(1)从第一个隐藏层逐步压缩input并提炼信息,而不是一次压的特别小
或
(2)在第一个隐藏层开始 先将input放大,然后再逐步压缩(即减小隐藏层宽度),如下图 )
但一般不会 一开始就先把图片压缩到很小再放大,因为这样会 丢失很多特征信息(但是后面CNN也有这么做的,到时再看吧)
模型参数与超参数的区别
模型参数指w权重、b偏差的值
超参数:如人为选择模型(是线性模型还是多层感知机 还是其他模型),如果是多层感知机 选多少层、每层多大, 训练的lr多少
个人概括:超参数就是人为可设置、人为可选的参数;模型参数就是 通过训练 模型自己得到的参数
hyperparameter
多层感知机与SVM
学术界就是个时尚界,每过几年就有不同的流行的东西
【SVM不怎么需要调参,而且数学理论有人推崇】
4.从时间顺序上来说:多层感知机是在SVM之前出现的
多层感知机虽然解决了XOR问题,但是 其弊端是需要 选择超参数;
但是SVM对于超参数不敏感, 最中间结果好坏受超参数影响很小。SVM的优化更容易实现(无需 SGD这种东西)。SVM有很漂亮的数学定理,有很多数学性的东西,如果 二者作用效果差不多 当然使用SVM。
现在之所以推荐用多层感知机MLP是因为,当问题变了后 你想改成别的神经网络,MLP的代码只需要简单修改、大体的优化算法等内容基本无修改 即可实现,而用SVM的改动量较大
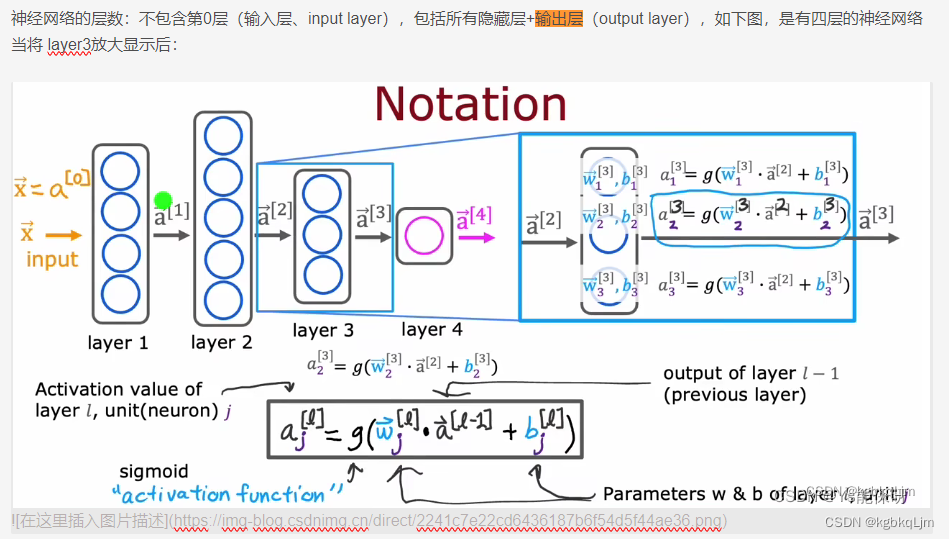
关于神经网络层数的说明
【隐藏层一般都是带非线性激活函数的】不带隐藏层的网络就是线性网络模型wx+b
【神经网络层数的说明】通常来讲,一层是指带权重的
一般来说,一层是包括【w、输入、b等权重的计算】+【(非线性)激活函数sigma】的。
如吴恩达,一般将input不算层数, 是所有的隐藏层+output 层 = 层数(当然也能理解为 input+所有隐藏层 不算输出层,其实意思是一样的,只是一般 不算input层,算output层)
个人感觉看几层没有绝对的定论,只是比表述、描述方式不同
感觉也不一定,吴恩达说过几层有的是不包括输入层的,也就是看权重有几层.但在其他一些地方就包括了输入层,这个几层无伤大雅
【下图无论用哪种看法 看 都是两层】每个箭头相当于可以学习的权重
吴恩达中:
关于W、X、b的维度说明
【总结】写W·X或X·W 或有时WT都没关系,意义都是 权重W和输入X做矩阵运算,各种写法的目的最终都是为了 能使二者的运算满足矩阵乘法运算规则。
怎么写都没有本质区别,和你如何定义 矩阵、向量有关(比如矩阵是mxn还是nxm,向量是行还是列)
如下图w写4x5的shape或5x4均可, 具体写法要看 输入X是怎么定义的
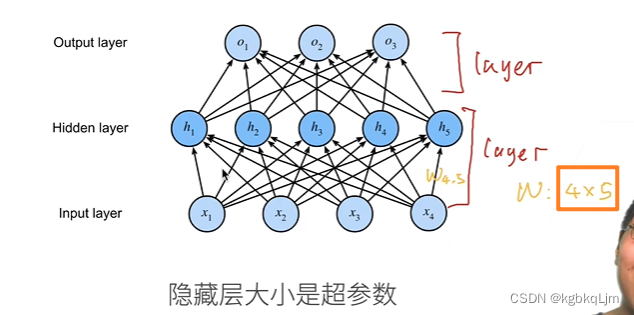
注意:是否需要转置和你的声明有关,最终只要是能满足X和W能做矩阵乘法运算,如:X·W或WT`X即可
H = relu(X @ W1 + b1) 如此处参与计算的X的shape为(自动计算,num_inputs)、W.shape为(num_inputs, num_hiddens)那么 直接X·W就满足矩阵乘法了,就无需对W转置了
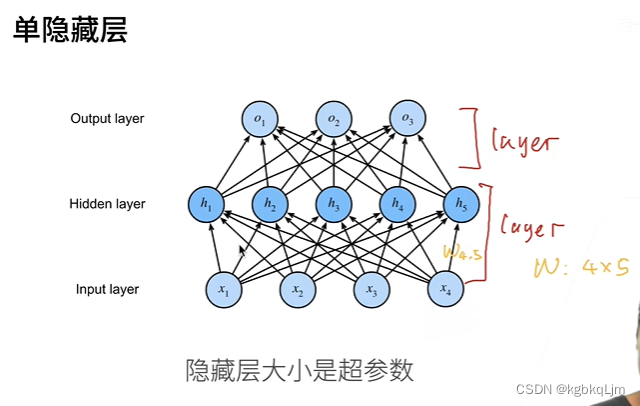
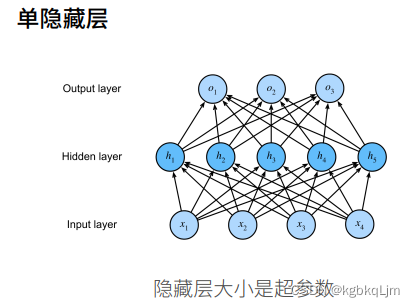
本课程中隐藏层大小
即单个隐藏层如何设计,即有多少个神经元,即 待学习的权重如何
10-多层感知机+代码实现
感知机(二分类问题)
个人理解:
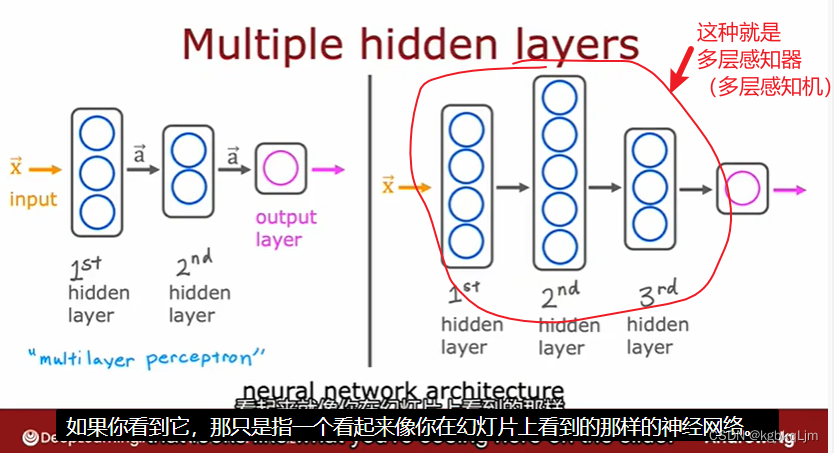
感知机即单层神经网络
多层感知机:多层神经网络
【多层感知器(多层感知机、multilayer perceptron)】就是如下图这种基本的多层的神经网络的宏观称呼

基本概述
六七十年前的模型:
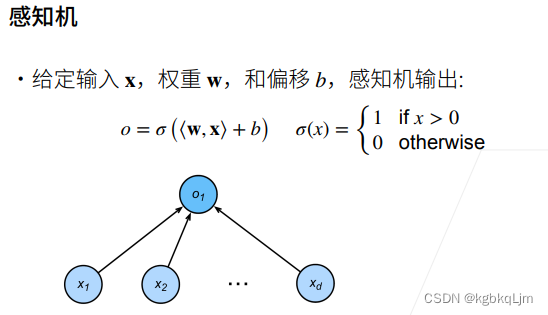
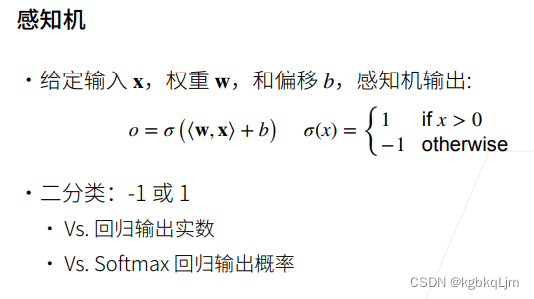
加粗为向量,<>内积
从图像上来看感知机: 有多个输入,一个输出(即二分类问题)
① 线性回归输出的是一个实数,感知机输出的是一个离散的类。
训练感知机
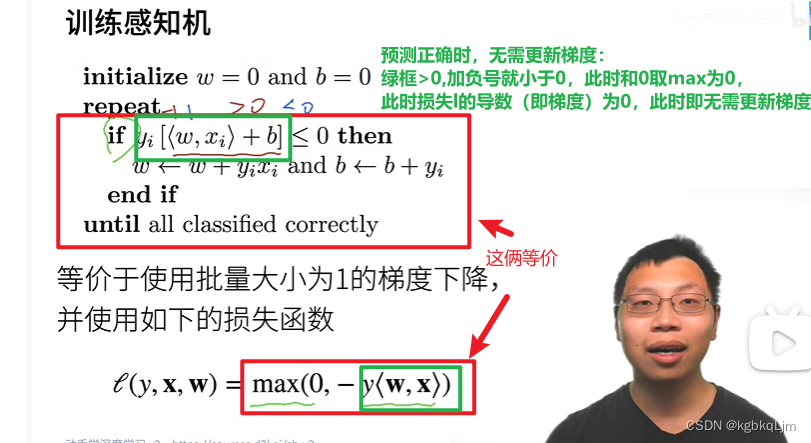
初始化w、b均为0
① 如果感知机预测分类正确的话,yi*[<w,xi>+b]为正数,负号后变为一个负数,max后输出为0,则梯度不进行更新。
② 如果分类错了,yi*[<w,xi>+b]为负数,则 下图中的if判断就成立了,就梯度进行更新,对参数w、b进行一次更新。
重复上述过程,直到所有类都分类正确
等价于每次拿一个样本去基于梯度下降进行更新(原始的感知机并未使用随机方法)
即下图中的感知机过程 等价于下图中下面红框的损失函数
yi应该是第i个样本的真实类别,绿框是 预测类别结果
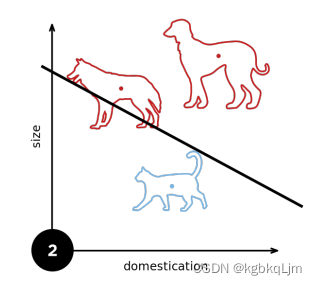
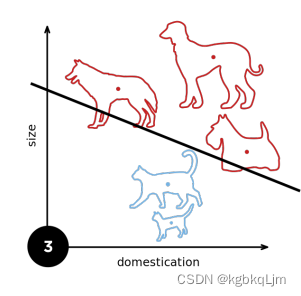
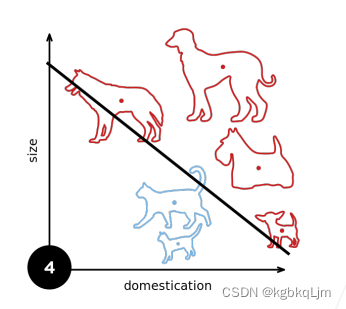
例子:狗、猫分类
domestication:驯化;驯养
当前分类模型的权重对应 黑色线
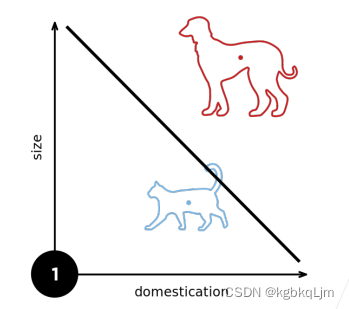
当再来一个狗时,原权重不对, 向下更新一点到 下图黑色线
下面的几个图是重复这个过程,直到对所有样本都分类正确
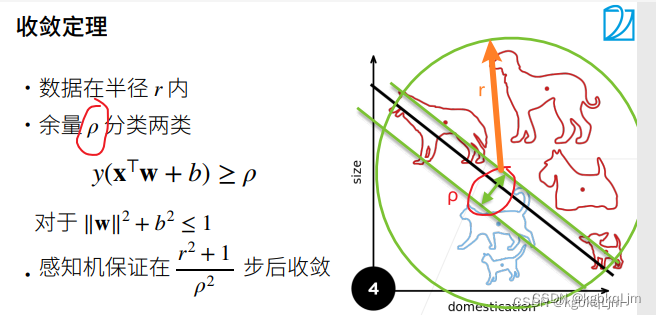
收敛定理:什么时候才能够停止
r越大,数据越大,收敛越慢
ρ越小,你的 预测模型的波动范围就不能太大,留给你的余量就小,那么花的时间自然就长
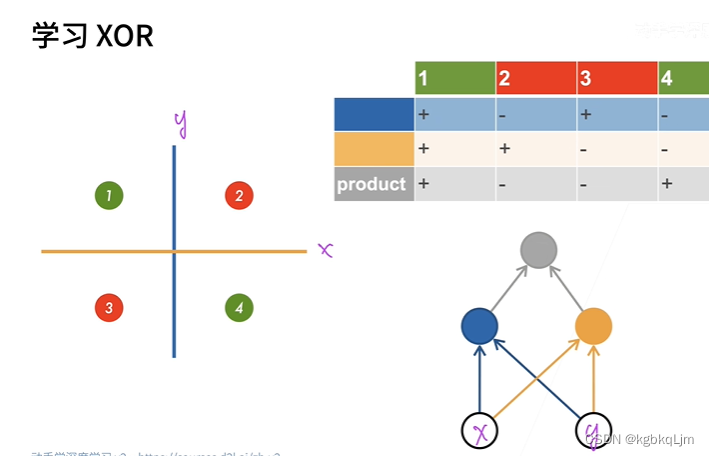
XOR:异或
感知机无法拟合XOR函数:红色代表一类(如-1),绿色代表一类(如+1),感知机(线性模型)无法产生线性分割面 将 共同的类别分割在一边(如下图中无法用一条直线将 相同颜色的点分割在一边)
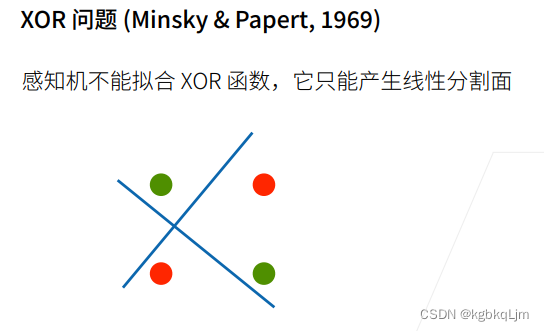
但是可以通过多层感知机解决上述问题
多层感知机(MLP、multilayer perceptron)
下图中各个隐藏层大小即指 每个隐藏层样子如何设计(即有多少个节点及节点的权重)
个人理解多层感知机:一定是个非线性模型。线性模型中 加入一或多个非线性隐藏层(即含非线性激活函数)后的 模型
【作用】其解决了 感知机(线性模型)不能拟合XOR的局限性(通过加入隐藏层和激活函数,感觉 图片中是 将 隐藏层节点和激活函数画在一起了,有些图片也会把二者分开画)

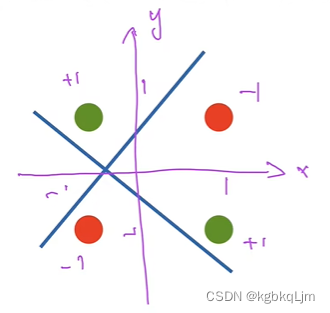
【引言】基于单线性模型解决不了XOR问题
根据上节,单线性模型肯定不能解决XOR问题,那么分步来看(即如果一步做不了,就改成多步,分别学出两个不同的简单函数,最后将 二者组合起来):
蓝色线y 根据 x的正负来分隔(分开了1、3 和 2、4);
黄色线x 根据y的正负来分隔(分开了1、2和3、4);
然后对结果做同或运算,得到product
下图中横纵轴分别为 两个特征,颜色是其label
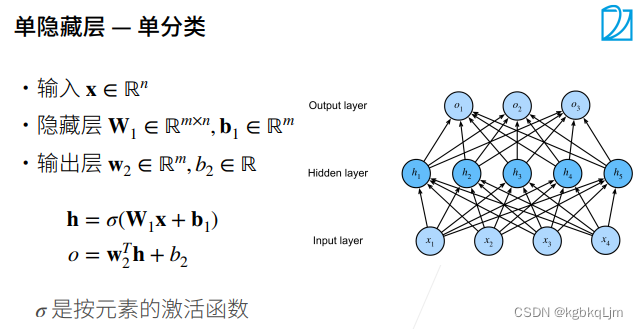
多层感知机解决单分类问题
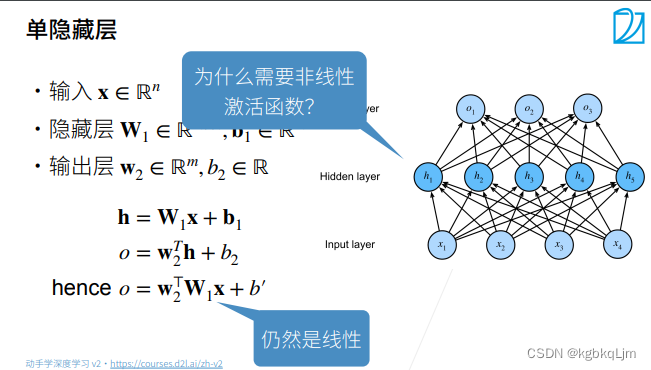
【正文】
我们能做的就是设置隐藏层大小,因为输入输出层的大小 已经固定了(实际需求)
具体看下:
输入为一个n维向量
W1:mxn矩阵,b1:长为m的向量
h:每个隐藏层的输出
提示:下面 左边参数和右边图无关
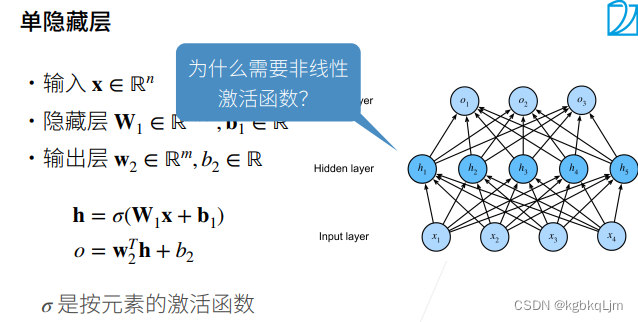
hence:因此
如果用线性的激活函数sigma,则 最后的模型还是线性模型
激活函数(sigmoid、Tanh、ReLU)
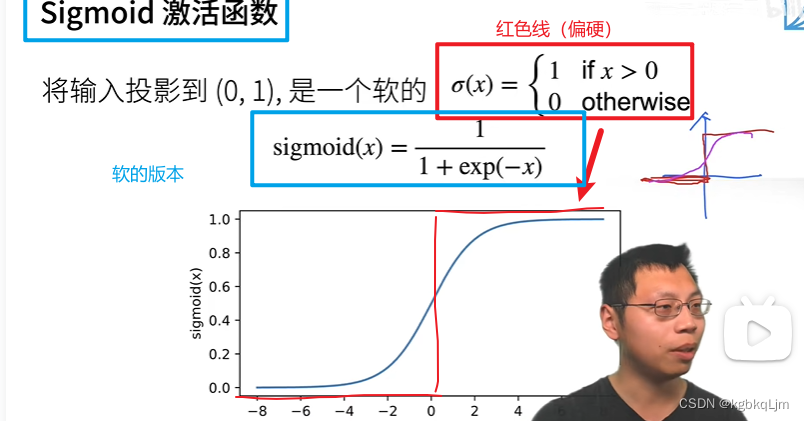
sigmoid
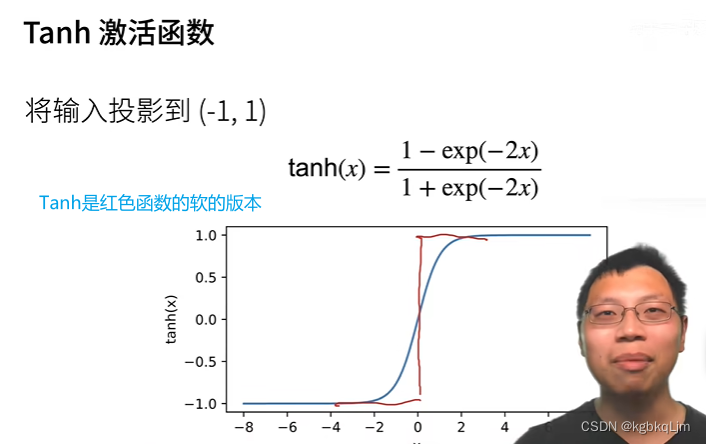
Tanh
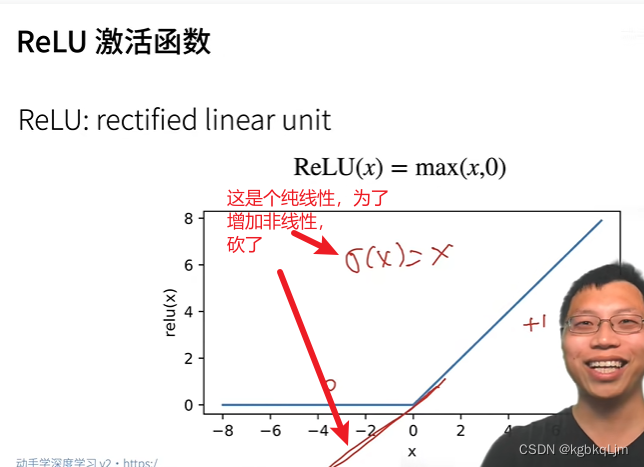
【常用】ReLU
【tips】选择激活函数的类型远远没有 选择隐藏层大小(即如隐藏层超参数的学习)重要,因此一般用ReLU即可
【简单、快捷】指数运算的开销(时间、性能空间等)很大,ReLU相较于前面的激活函数,无指数运算
多层感知机解决多类分类问题(应用了softmax)
多类分类与softmax的唯一区别就是多加了 隐藏层,其他没有本质区别
如下图中 没有中间的隐藏层,就是简单的softmax回归;
如下图,则为 多层感知机
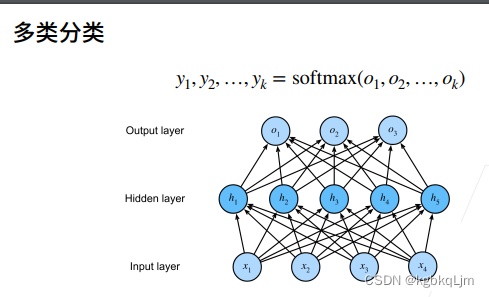
多层感知机解决多分类问题时,除了 向量、标量、矩阵等维度方面的变化,还有 多了一步softmax

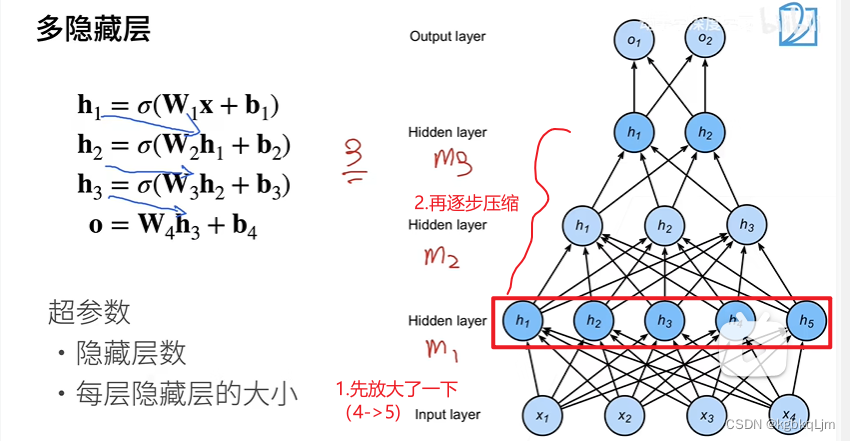
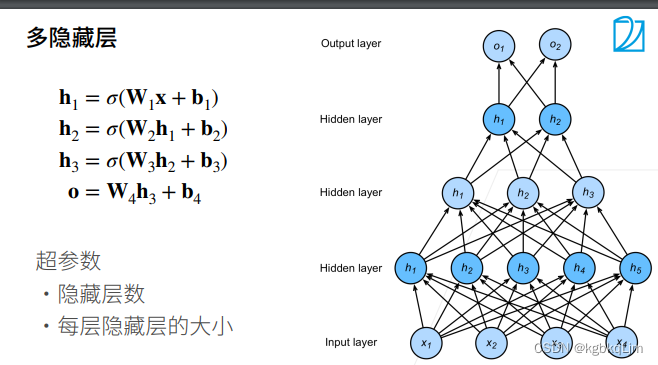
多隐藏层的多层感知机
h为每个隐藏层的输出
最后一层无需激活函数(即 下图中 sigma)
【与之前单分类问题多层感知机的区别】超参数变多了(即 选多少个隐藏层,以及每个隐藏层是什么样的(有经验在里面的))
经验:网络是宽点好(即 隐藏层数少,每个隐藏层比较宽)还是深点好(有多个隐藏层)
一般来说 多隐藏层时, 前面到后面 隐藏层宽度越来越小
(即
(1)从第一个隐藏层逐步压缩input并提炼信息,而不是一次压的特别小
或
(2)在第一个隐藏层开始 先将input放大,然后再逐步压缩(即减小隐藏层宽度),如下图 )
【W是否转置的说明】注意:是否W需要转置和你的声明有关,最终只要是能满足X和W能做矩阵乘法运算,如:X·W或WT`X即可
但一般不会 一开始就先把图片压缩到很小再放大,因为这样会 丢失很多特征信息(但是后面CNN也有这么做的,到时再看吧)
【具体可看视频 P2多层感知机 17:00】https://www.bilibili.com/video/BV1hh411U7gn/?p=2&spm_id_from=pageDriver&vd_source=e81e116c4ffe5e79d4bc44738263eda4
代码实现
从零实现
注意:是否需要转置和你的声明有关,最终只要是能满足X和W能做矩阵乘法运算,如:X·W或WT`X即可
H = relu(X @ W1 + b1) 如此处参与计算的X的shape为(自动计算,num_inputs)、W.shape为(num_inputs, num_hiddens)那么 直接X·W就满足矩阵乘法了,就无需对W转置了
import torch
from torch import nn
from d2l import torch as d2l
# 0.
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
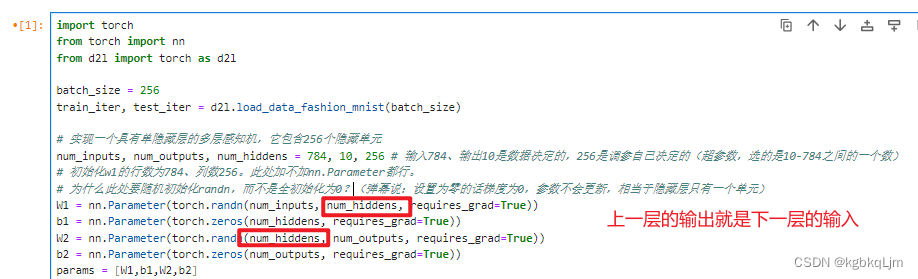
# 1.实现一个具有单隐藏层的多层感知机,它包含256个隐藏单元
num_inputs, num_outputs, num_hiddens = 784, 10, 256 # 输入784、输出10是数据决定的,256是调参自己决定的(超参数,选的是10-784之间的一个数)
# 初始化w1的行数为784、列数256。此处加不加nn.Parameter都行。
# 为什么此处要随机初始化randn,而不是全初始化为0?(弹幕说:设置为零的话梯度为0,参数不会更新,相当于隐藏层只有一个单元)
W1 = nn.Parameter(torch.randn(num_inputs, num_hiddens, requires_grad=True))
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True)) # 向量
W2 = nn.Parameter(torch.randn(num_hiddens, num_outputs, requires_grad=True))
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True)) # 向量
params = [W1,b1,W2,b2]
# 2.实现 ReLu 激活函数
def relu(X):
a = torch.zeros_like(X) # a的数据类型、形状都和X一样,但是元素值全为 0
return torch.max(X,a)
# 3.实现模型
def net(X):
#print("X.shape:",X.shape)
# 原输入X:batch*28*28的 先拉成 batch*784
X = X.reshape((-1, num_inputs)) #将输入X拉成一个二维矩阵,-1自动计算(结果应该为batch_size),(应该是以便可以满足X·W的矩阵乘法)
#print("X.shape:",X.shape)
H = relu(X @ W1 + b1) # @:矩阵乘法
#print("H.shape:",H.shape)
#print("W2.shape:",W2.shape)
return (H @ W2 + b2)
# 损失
loss = nn.CrossEntropyLoss() # 交叉熵损失
# 4.【训练】多层感知机的训练过程与softmax回归的训练过程完全一样
num_epochs ,lr = 30, 0.1
updater = torch.optim.SGD(params, lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater)
基于框架实现
和之前区别不大
import torch
from torch import nn
from d2l import torch as d2l
# 0.
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
# 1.实现一个具有单隐藏层的多层感知机,它包含256个隐藏单元
num_inputs, num_outputs, num_hiddens = 784, 10, 256 # 输入784、输出10是数据决定的,256是调参自己决定的(超参数,选的是10-784之间的一个数)
# 初始化w1的行数为784、列数256。此处加不加nn.Parameter都行。
# 为什么此处要随机初始化randn,而不是全初始化为0?(弹幕说:设置为零的话梯度为0,参数不会更新,相当于隐藏层只有一个单元)
W1 = nn.Parameter(torch.randn(num_inputs, num_hiddens, requires_grad=True))
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True)) # 向量
W2 = nn.Parameter(torch.randn(num_hiddens, num_outputs, requires_grad=True))
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True)) # 向量
params = [W1,b1,W2,b2]
# 2.实现 ReLu 激活函数
def relu(X):
a = torch.zeros_like(X) # a的数据类型、形状都和X一样,但是元素值全为 0
return torch.max(X,a)
# 3.实现模型
def net(X):
#print("X.shape:",X.shape)
# 原输入X:batch*28*28的 先拉成 batch*784
X = X.reshape((-1, num_inputs)) #将输入X拉成一个二维矩阵,-1自动计算(结果应该为batch_size),(应该是以便可以满足X·W的矩阵乘法)
#print("X.shape:",X.shape)
H = relu(X @ W1 + b1) # @:矩阵乘法
#print("H.shape:",H.shape)
#print("W2.shape:",W2.shape)
return (H @ W2 + b2)
# 损失
loss = nn.CrossEntropyLoss() # 交叉熵损失
# 4.【训练】多层感知机的训练过程与softmax回归的训练过程完全一样
num_epochs ,lr = 30, 0.1
updater = torch.optim.SGD(params, lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater)
QA
1.下图中的两个x不是一个东西

2.【神经网络层数的说明】通常来讲,一层是指带权重的
一般来说,一层是包括【w、输入、b等权重的计算】+【(非线性)激活函数sigma的计算】的。
如吴恩达,一般将input不算层数, 是所有的隐藏层+output 层 = 层数(当然也能理解为 input+所有隐藏层 不算输出层,其实意思是一样的,只是一般 不算input层,算output层)
个人感觉看几层没有绝对的定论,只是比表述、描述方式不同
感觉也不一定,吴恩达说过几层有的是不包括输入层的,也就是看权重有几层.但在其他一些地方就包括了输入层,这个几层无伤大雅
【下图无论用哪种看法 看 都是两层】每个箭头相当于可以学习的权重
3.涉及数学上的统计学 与 机器学习的区别,
收敛定理是统计学中的概念
可以认为:统计是数学上的概念,那么 机器学习就是统计的计算机分支
因此 从计算机的角度,不会看ρ怎么算
数学和计算机是有关联得
4.从时间顺序上来说:多层感知机是在SVM之前出现的
多层感知机虽然解决了XOR问题,但是 其弊端是需要 选择、学习超参数;
但是SVM对于超参数不敏感, 最中间结果好坏受超参数影响很小。SVM的优化更容易实现(无需 SGD这种东西)。SVM有很漂亮的数学定理,有很多数学性的东西,如果 二者作用效果差不多 当然使用SVM。
现在之所以推荐用多层感知机MLP是因为,当问题变了后 你想改成别的神经网络,MLP的代码只需要简单修改、大体的优化算法等内容基本无修改 即可实现,而用SVM的改动量较大
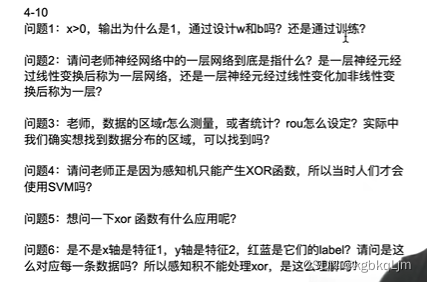
5.无。单纯是为了 举证单层感知机解决不了的问题 而举的例子
6.是的。单层感知机不能处理
模型复杂度(模型容量)简单理解就是模型的能力。一般为了实现相同的模型复杂度,有两种修改思路: 用宽的网络(隐藏层数量不多,但是单个隐藏层中神经元个数多)或深的网络(隐藏层数量多)
但是,胖的模型(如下图左侧)不如 深的模型(下图中右侧)好训练,
胖的模型容易过拟合,很难一口吃成个胖子;
深的模型 通过每一层逐步学习,每层学习不同的特征,整体更好实现效果
(弹幕说)这个问题推荐看李宏毅老师的鱼和熊掌可以兼得那集,讲得很细
8.后面讲
9.ReLU虽然在x大于0或小于0部分都是线性的,但是整体上是非线性的。
10.选择激活函数的类型远远没有 选择隐藏层大小(即如隐藏层超参数的学习)重要,因此一般用ReLU即可
12.理论上没区别,但一般 深一点的更好。没有最优
一般来说,当你没有什么想法时:都是从简单慢慢试到复杂, 到更宽、更深。
如下图一开始就用线性模型,后来加一个隐藏层, 改变单个隐藏层的设计, 再增加多个隐藏层,再试着改变多个隐藏层中每一个的设计
当你有了自己的理解后: 手感、只可意会
13.后面讲
14.怎么写都没有本质区别,和你如何定义 矩阵、向量有关(比如矩阵是mxn还是nxm,向量是行还是列)
15.一般训练完 参数都是固定的。
动态性和泛化性(鲁棒性)是两种东西
一旦有动态性可能会出现问题(如谷歌将黑人预测为猩猩)。
泛化性(鲁棒性):感觉就是 可靠准确的输出结果受 输入数据变化的影响程度,
泛化性低:比如 人脸识别时 换个姿势 就识别不准确了
弹幕说:其实,这个问题可以看看吴恩达机器学习的线上学习部分
17.后面讲
18.【即调参】可以用验证数据集做这个事情。 可以猜、试,然后用 数据去初试一下效果
11-模型选择(即选择超参数)+过拟合欠拟合
模型选择
引言
但其实 穿蓝衣服作为特征是无意义的,但是模型不知道。
训练误差和泛化误差、训练+验证+测试集
我们关心的是泛化误差,不关心训练误差(但也不是这么绝对,毕竟训练误差也能说明一些问题 给我们提供调整模型的指导意义)。
训练误差:高考前的模拟考试(摸底)
泛化误差:高考( 模型在 目前不在手上的数据上的误差)
如何计算训练误差和泛化误差,一般我们有两种数据集
【训练(数据)集】
(1)用于训练模型参数
(2)通俗理解:平时作业题、练习。
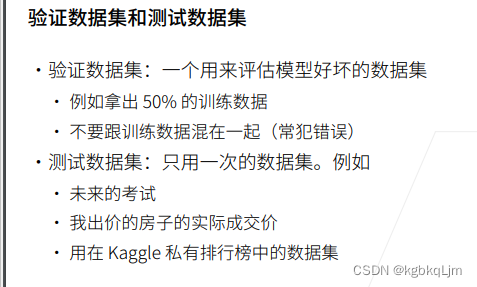
【验证(数据)集 cv】
(1)是一个额外的数据集、不参加训练,用于选择模型超参数
(2)通俗理解:验证集是小测和模拟考试
(3)个人补充(QA中提到):用validation set来看欠、过拟合情况
【测试(数据)集 test】相当于正式考试(期末考试、高考)只能使用一次,不能用来调整超参数,一旦发生了就不能改变了。(测试数据集是用来评估模型泛化能力的,不在训练过程中使用,只在结束后使用)
【注意】
1.验证数据集的数据一定不能和训练数据集混在一起
2.用测试数据集当作验证数据集去评估模型的好坏并调整超参数,然后再在测试数据集上看所谓的最终效果效果(那肯定很好),相当于考试作弊(学术造假)【此时在 验证数据集上的数据精度和指标 不能代表 该模型在 新的数据集(即测试集)上的泛化能力】
(弹幕说)测试数据集用一次,就是防止调参过程中无意识的去拟合测试数据,那么这样测试数据就成了训练数据了,测试没有意义了
【注】实际场景下 三个集肯定要单独分开的,此处课程为了方便 把验证集当成测试集了
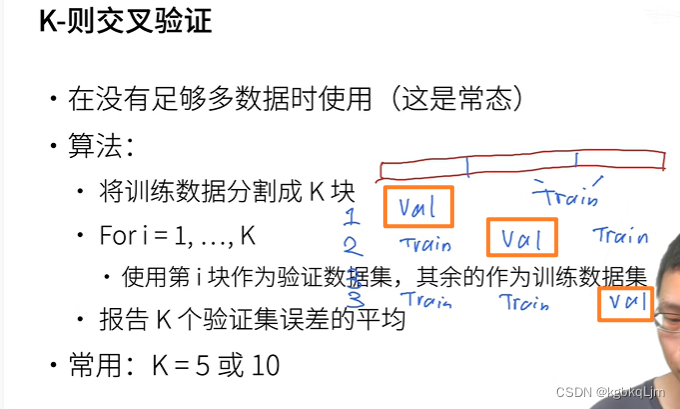
K-则交叉验证(k-fold cross validation)(数据集不大时才用)
【引言】实际场景下,我们手中的数据量有限,无法做到 将 50%的数据用作训练集、50%用作验证集。
【作用】用来确定超参数
【应用】例如给你一个数据集,且 模型有10种不同的超参数(如不同的lr、不同隐藏层大小等)供选择,通过k则交叉验证(如5则), 对每一种超参数对应的模型都 使用k则交叉验证并 最终得到该种超参数的 平均精度(或平均误差), 从10个平均精度中选择最高的那组超参数作为最终的超参数。
个人理解:每组超参数通过k则交叉验证都能得到 一个平均精度
【使用流程】
1.拿到数据集后,将其随机打乱并分割成k块,然后做k次训练,
2.每次我们将第i块 作为验证数据集,其余的为训练数据集。这样这k次训练,每次都能拿到一个验证精度、验证误差,共k个
3.最后将这k个精度求平均值,就得到了k则交叉验证的误差
如下图3则:
相当于用了66%的数据作为train,虽然验证集validation不足之前的50%,但是 其带来的误差可以通过 求 3次的平均值来弥补
极端例子:k=n,n很大, 这样的代价就是需要做n次训练,代价很大
【k的取值】如果数据量很大,k可以取小点如2、3;如果数据量很大,k可以取大点,如10.
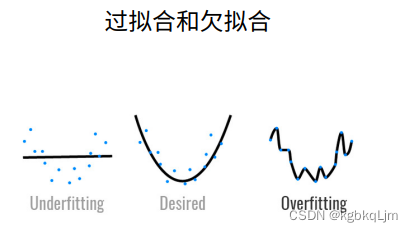
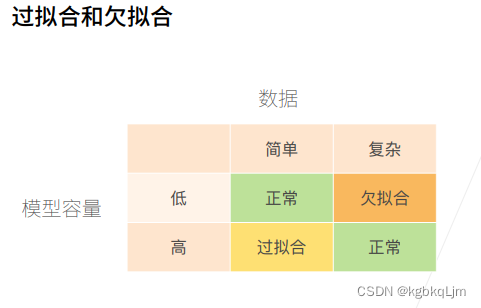
欠拟合、过拟合
概述
【深度学习的核心】首先是要模型足够大(不大的话没有前途,很难解决复杂问题),在此基础上通过各种手段 来控制模型容量,使得最终得到较小的泛化误差
模型容量即模型复杂度:拟合各种函数的能力。复杂的模型可以学习更复杂的函数。模型容量低就是简单的模型。
简单数据集如MNIST,复杂数据集如ImageNet
过拟合:过于关注细节,模型记住了所有的 训练样本,导致对新样本的泛化能力差
(某种意义上来说过拟合不是一件坏事)
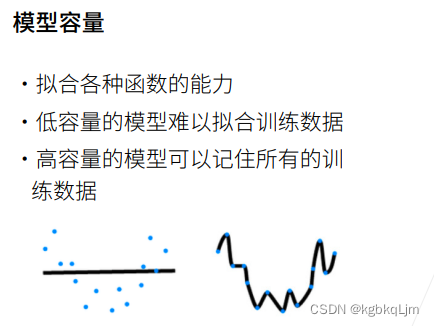
模型容量(模型复杂度、模型能力)
模型容量即模型复杂度:拟合各种函数的能力。复杂的模型可以学习更复杂的函数。模型容量低就是简单的模型。
【深度学习的核心】首先是要模型足够大,在此基础上通过各种手段 来控制模型容量,使得最终得到较小的泛化误差
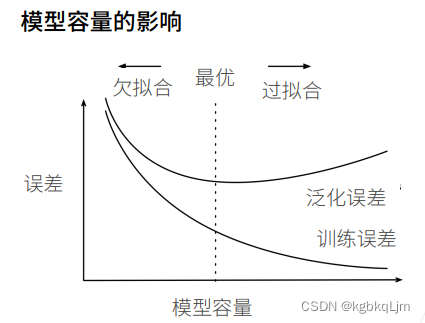
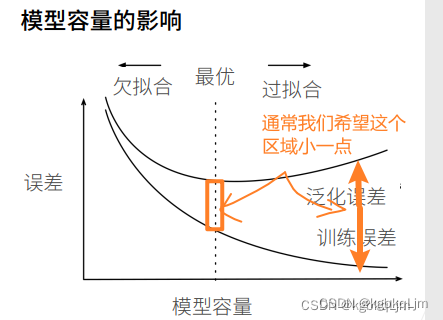
假设数据集是中等且固定的情况下:
目的是为了减小 最优的泛化误差,因此 不得不需要承担一定程度上的过拟合
横轴上每一个点都是不同的模型
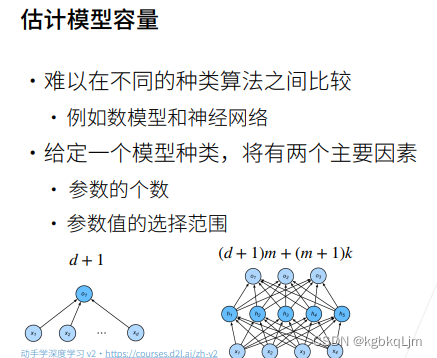
估计模型容量
【1.参数个数】通过参数数量来判断模型容量
(1)对于线性模型(下图左侧):可学习的参数个数为d+1(其中数据有d个,d+1的1是b(bias))
(2)对于单层隐藏层(下图右侧):
隐藏层里有m个节点,每个节点包含d个w参数和一个bias参数,所以是(d+1)m
输出层最终预测为k个类别,输出层的每个y_hat节点包含m个w参数(由上一层的节点数决定)和一个bias,所以是(m+1)k
(3)结论:因此简单来说,可以通过 可学习的参数数量来 判断哪个模型容量大
【2.参数值的选择范围】通过参数值的可选择范围来判断模型容量
(1)如果一个参数可以在很大的范围内进行选择,模型复杂度高
【了解】VC维(偏统计学理论)
【简单理解】一个模型能记住的最大的数据集长什么样子
推荐《机器学习基石》林轩田老师对应的视频
深度学习中的VC维 计算较困难,在深度学习中应用不多
(两个大佬的首字母缩写)
VC维简称为VC:
对于一个分类模型,VC维等价于 一个最大的数据集的大小, 无论我们如何给定这个数据集的标号(即数据的label),都存在一个模型(一个给定参数的模型)能对该数据集进行完美分类。
简单理解:假设我的模型能做(作用于)一个很复杂的数据集,假设有100张图片,不管这些图片的label如何变化、不管图片中的值如何选择,我都可以通过一个模型对该数据集进行分类, 那么 该模型的复杂度 比 我只能对一个 10张图片、且不管label怎么变化都能分类的数据集 来得快。
模型复杂度等价于 我能够完美的记住一个数据集,那么这个数据集有多大。
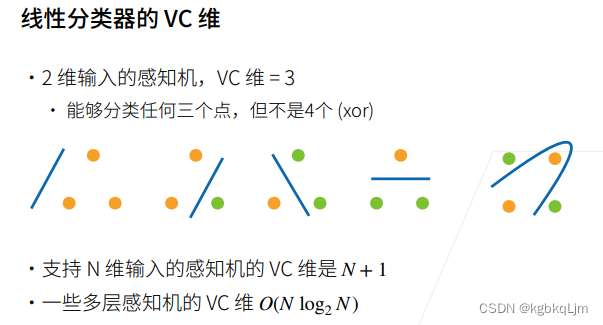
例子:
如下图,对于二维输入的感知机(二维即平面上的点),其可以 对 任何三个点进行正确分类,则VC维=3;
但不能对任何四个点正确分类
数据复杂度
即我们直观上的理解
如有时间、空间维度上的数据、特征信息
基于代码看现象
基于代码看一下 模型选择、欠拟合过拟合的现象,通过一个简单的人工数据集:
参考链接:https://blog.csdn.net/weixin_46805040/article/details/122851333
0【公式】
① 使用以下三阶多项式来生成训练和测试数据的标签:
② 这个式子只是一个三次多项式,并不是哪个函数的泰勒展开。
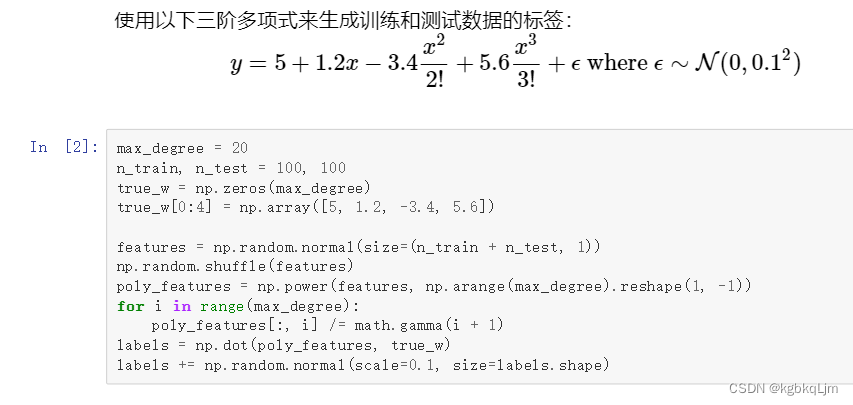
公式中5为真实label;
除以2!和3!是希望x不要太大
4.模型net就是一个简单的线性回归模型(这个能很好地 演示 对于简单的模型,输入不同数量的数据时的效果):
当给 正好的数据量时,拟合效果很好(如(5));
当给的数据太少时,欠拟合 如(6);
当给全部的数据时,过拟合(因为 后面16列都是噪音,是干扰, 该模型为了拟合这些 学的结果肯定不对)
5.拟合很好的效果: 拿前4列数据(因为 后面16列理论上都是0,后面都是噪音)
下图 最终 的gap不大,说明没有发生很明显的过拟合
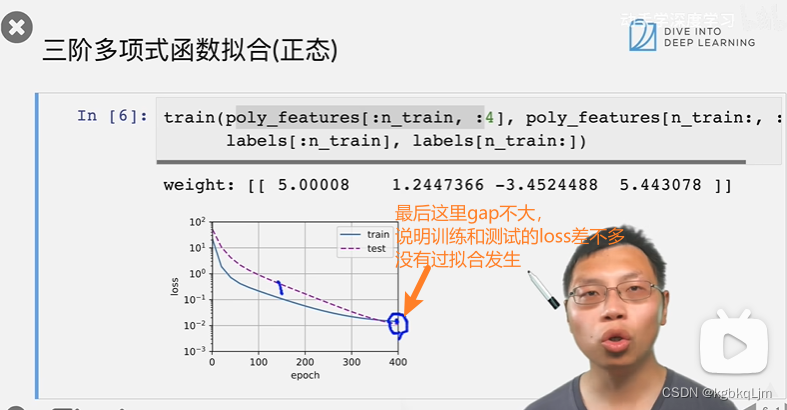
# 三阶多项式函数拟合(正态)
train(poly_features[:n_train,:4],poly_features[n_train:,:4],labels[:n_train],labels[n_train:]) # 最后返回的weight值和公式真实weight值很接近
6.欠拟合效果:拿前两列来训练(数据都没给全,肯定 最后训练不到位)
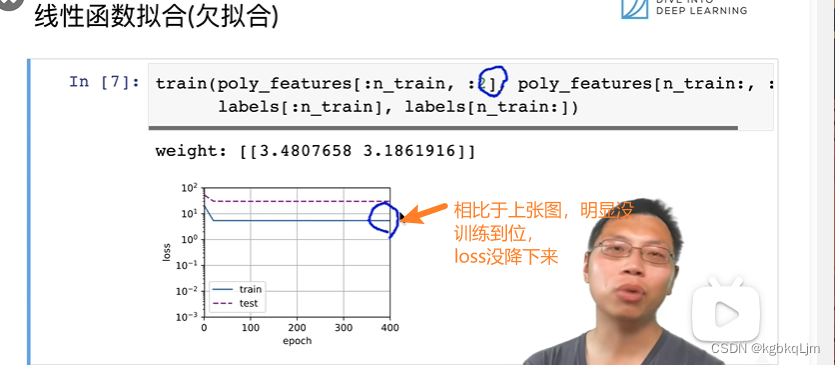
# 一阶多项式函数拟合(欠拟合)
# 这里相当于用一阶多项式拟合真实的三阶多项式,欠拟合了,损失很高,根本就没降
train(poly_features[:n_train,:2],poly_features[n_train:,:2],labels[:n_train],labels[n_train:])
7.过拟合效果:
这次把所有数据(共20列)都给你了(含16列噪音)
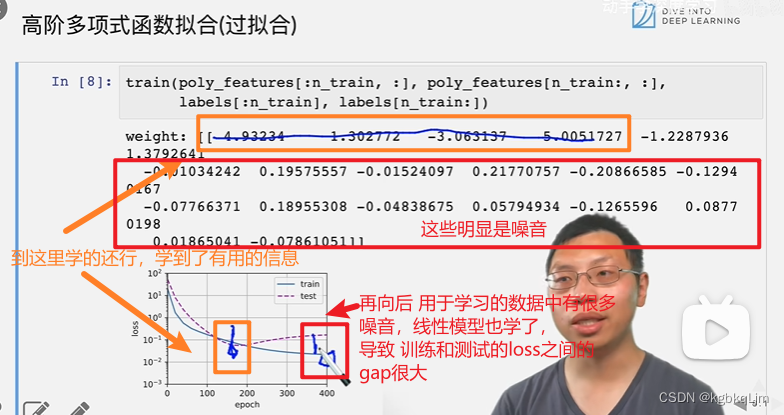
# 十九阶多项式函数拟合(过拟合)
# 这里相当于用十九阶多项式拟合真实的三阶多项式,过拟合了
train(poly_features[:n_train,:],poly_features[n_train:,:],labels[:n_train],labels[n_train:])
【其他部分总代码】
# 通过多项式拟合来交互地探索这些概念
import math
import numpy as np
import torch
from torch import nn
from d2l import torch as d2l
# 0.
max_degree = 20 # 输入特征为20种(长度为20):就是每一个样本是一个[20,1]的tensor
n_train, n_test = 100, 100 # 100个训练样本、100验证样本(即测试样本) 注:为了偷懒方便,将验证集也写为test
true_w = np.zeros(max_degree) # 真实的w是长为20的w
true_w[0:4] = np.array([5,1.2,-3.4,5.6]) # 真实label为5,即只有前4列是有非0权重的,剩下其他元素的均为0,即噪音项
features = np.random.normal(size=(n_train+n_test,1))
print(features.shape)
np.random.shuffle(features)
print(np.arange(max_degree))
print(np.arange(max_degree).reshape(1,-1))
print(np.power([[10,20]],[[1,2]]))
poly_features = np.power(features, np.arange(max_degree).reshape(1,-1)) # 对第所有维的特征取0次方、1次方、2次方...19次方
for i in range(max_degree):
poly_features[:,i] /= math.gamma(i+1) # i次方的特征除以(i+1)阶乘
labels = np.dot(poly_features,true_w) # 根据多项式生成y,即生成真实的labels
labels += np.random.normal(scale=0.1,size=labels.shape) # 对真实labels加噪音进去
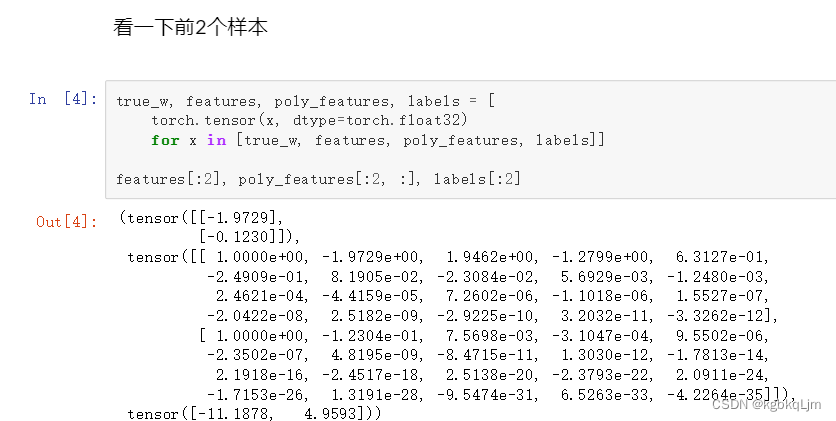
#1.看一下前两个样本
true_w, features, poly_features, labels = [torch.tensor(x,dtype=torch.float32) for x in [true_w, features, poly_features, labels]]
print(features[:2]) # 前两个样本的x
print(poly_features[:2,:]) # 前两个样本的x的所有次方
print(labels[:2]) # 前两个样本的x对应的y
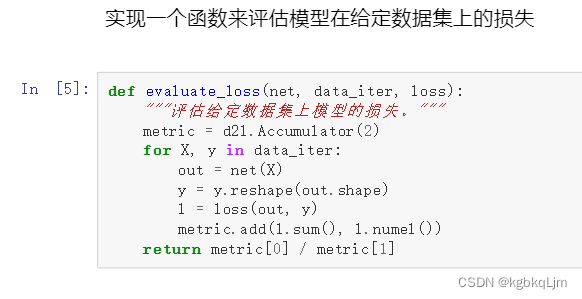
# 2.实现一个函数来评估模型在给定数据集上的损失
def evaluate_loss(net, data_iter, loss):
"""评估给定数据集上模型的损失"""
metric = d2l.Accumulator(2) # 两个数的累加器
for X, y in data_iter: # 从迭代器中拿出对应特征和标签
out = net(X)
y = y.reshape(out.shape) # 将真实标签改为网络输出标签的形式,统一形式
l = loss(out, y) # 计算网络输出的预测值与真实值之间的损失差值
metric.add(l.sum(), l.numel()) # 总量除以个数,等于平均
return metric[0] / metric[1] # 返回数据集的平均损失
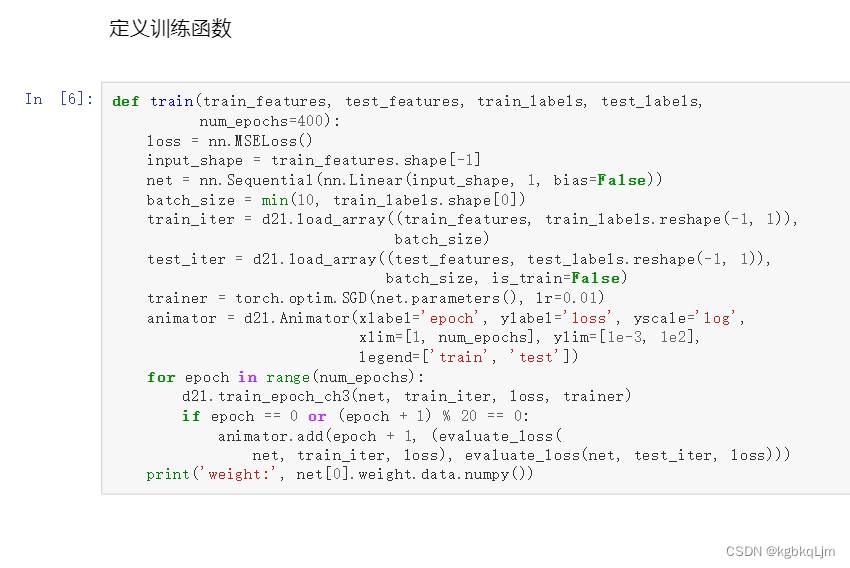
# 3.定义训练函数(输入数据,做线性回归,打印看下曲线变化,看下学到的weight)
def train(train_features, test_features, train_labels, test_labels, num_epochs=400):
loss = nn.MSELoss()
input_shape = train_features.shape[-1]
net = nn.Sequential(nn.Linear(input_shape, 1, bias=False)) # 单层线性回归
batch_size = min(10,train_labels.shape[0])
train_iter = d2l.load_array((train_features,train_labels.reshape(-1,1)),batch_size)
test_iter = d2l.load_array((test_features,test_labels.reshape(-1,1)),batch_size,is_train=False)
trainer = torch.optim.SGD(net.parameters(),lr=0.01)
animator = d2l.Animator(xlabel='epoch',ylabel='loss',yscale='log',xlim=[1,num_epochs],ylim=[1e-3,1e2],legend=['train','test'])
for epoch in range(num_epochs):
d2l.train_epoch_ch3(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss), evaluate_loss(net,test_iter,loss)))
print('weight',net[0].weight.data.numpy()) # 训练完后打印,打印最终学到的weight值
QA
1
缺点:
(1)SVM是通过kernel来匹配模型复杂度的,.如果使用 kernel SVM,其kernel算起来麻烦, 很难计算大的数据量(如百万千万),但 神经网络 就可以算
(2)可调整的东西不多, 无非是kernel相关
神经网络的优点:
(1)神经网络本身是一种语言, 不同的layer(相当于编程工具),我们通过编程来实现我们对世界的理解
(2)神经网络可通过卷积进行特征的提取和分类,SVM解决分类问题还是ok的
(3)神经网络解决大量数据问题也可以
3.是的。
4.如1
常用方法:
(1)train :test=7:3,然后在trainset上做5则交叉验证(即每次拿训练集的20%作为验证集,做5次)
(2)如果数据量足够多,就 train:test= 5:5,在train set上做k则交叉验证
(3)如ImageNet,有1000类label,平均一个类大概5000张样本,对每个类随机挑50张图片,最后得到50000张的验证集,剩下的作为测试
注:Andrew Ng’s machine learning里推荐0.6 0.2 0.2
6.用validation来看欠、过拟合
7.如股票预测,时序序列需要保证验证集是在训练集之后的
不能这么做:将前一个月数据拿出来,中间采样一些点作为验证集
一般时序序列数据的做法:获取一个月数据作为训练集, 取一个星期作为验证集,该星期之前的作为训练集
当要做标准化时, 如(数据-均值)/方差,均值和方差如何计算:
方法一:把训练集和测试集(即所有的数据集)都拿过来算均值和方差(模型鲁棒性更好)
方法二:只在训练集上算均值、方差,然后将二者作用到验证(测试)集上
具体看实际场景下,你是否能拿到验证集的数据,如果能拿到,用方法一,拿不到就方法二
9.是的。深度学习一般数据量大,用k则交叉验证成本太大
10.验证集只是用来选择超参数的
- 总的数据集就是一个, 然后将数据分成几份数据集,不同的数据集做不同的事情
12.理论上k越大 效果越好 但成本和代价越大,因此实际上 选择 能承受的计算成本范围内 选最大的k
13.不同。
模型参数指w权重、b偏差的值
超参数:如人为选择模型(是线性模型还是多层感知机 还是其他模型),如果是多层感知机 选多少层、每层多大, 训练的lr多少
个人概括:超参数就是人为可设置、人为可选的参数;模型参数就是 通过训练 模型自己得到的参数
hyperparameter
14.例如给你一个数据集,且 模型有10种不同的超参数(如不同的lr、不同隐藏层大小、不同权重等)供选择,通过k则交叉验证(如5则), 对每一种超参数对应的模型都 使用k则交叉验证并 最终得到该种超参数的 平均精度(或平均误差), 从10个平均精度中选择最高的那组超参数作为最终的超参数。
15.问的应该是偏差和方差的区别
16.欠过拟合能告诉你什么样是好的,什么样是不好的,供你参考 以便最后选择合适的超参数来 得到泛化能力好的模型
17.HPO问题:超参数优化,Hyper-parameter optimization
涉及到两个问题:
1.设计:例如前面的例子 设计了10组不同的超参数 从里面选一种, 那么这10种如何设计
2.每种超参数都告诉你有多少种选项,理论上 有很多种组合方式,但是很难把所有情况都遍历一次(此即为网格)
答:
超参数的设计靠人的经验,一般别的太大或太小
如何选最好的搜索:
1.自己调(老中医)
2.每次随机选,最后选 精度最高表现最好的那组超参数【推荐】
实际两类数据的占比是1:9:
当数据量很大时,随便划分比例都可;
当数据量不大时,验证数据集中两类数据最好比例1:1(因为 可能 分类器把所有样本都预测为 占比为9的那类,准确率还有90%,显然不合理)
19.k则交叉验证就是用来确定超参数
有很多种做法,此处举例:
1.最常见的:基于k则交叉验证确定表现最好的一组超参数,然后用该组超参数再训练一次模型,得到最后结果
2.不重新训练,直接选择该组超参数以及 该组超参数下的精度最好的那一则模型参数。(代价就是 少看了一些训练集)
3.(也不错的选择,好处是增加了模型稳定性 因为做了voting,代价是 预测代价是只预测一次的k倍)基于k则交叉验证选择好一组超参数后, 并 把 k则交叉验证的k个模型都拿到,做预测时 把测试集放到 k个模型的每个里面都预测一下,最后把预测结果取均值
20.验证误差 validation误差
21.不是打败,是流行
深度学习打败SVM是 实用性更好(虽然理论不如SVM)
22.网上的图 Loss和epoch的曲线,全程是一个模型,横轴是迭代次数;
下图的横轴是 代表不同的模型;
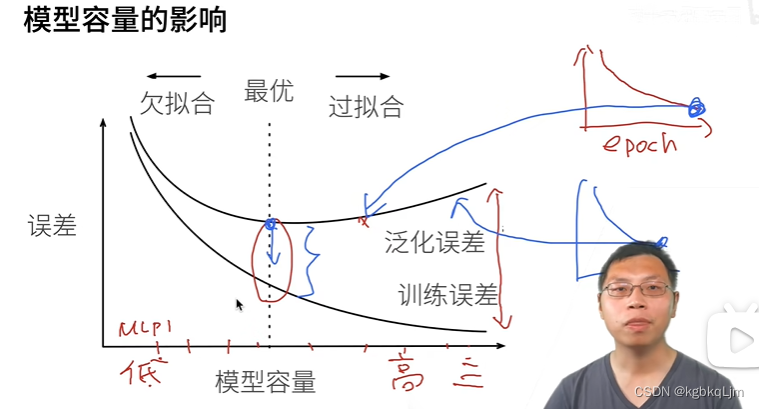
如果验证集上 loss和epoch的曲线 先下降后上升,就是过拟合
24.一般深度学习特指神经网络 这一块,随机森林和深度学习结合的 较少。一般可能是 用随机森林(不是用梯度下降的)、神经网络、其他方式各做一次,然后 对多种方式的结果投票得到最终结果
25.有的
26.label
27.一般深度学习模型 不做限制(如正则化、泛化等)都是无限VC维的
28.见19,有很多种方式
30.见19
- CNN其实本质上也是MLP,只不过多了一些限制(比如将一些weight固定住了)
即 通过神经网络来描述 我对这个问题的理解
世界上有三种东西:
艺术:我做了一件事,但我也不知道怎么解释,我觉得这样好看点
工程:我做的事情可以通过实际来验证,都可以通过定理来描述
科学:去理解为什么
深度学习(神经网络)一开始是艺术(我有个想法 且 也能work,得想个理由如何解释,虽然 暂时也不知道如何解释是最合理的),但只要你能work,总有人帮你找到理由去解释为何work(此即engineer的任务)
比如蒸汽机先出现,解释蒸汽机的原理的物理学知识是100年后才出来的,有一定的滞后性
32.看从哪个角度看
涉及统计学的优化
像大数定理
- 噪音肯定越少越好。 此处只是为了讲解和演示才加了噪音
34.可以不平衡,但应该通过加权使得其平衡
以问题18举例:实际两类数据的占比是1:9,此时要结合实际场景看一下:
(1)是否在现实场景下,确实 这两类的占比也是如你 手头数据集这样的 占比是1:9,那你的目标就是 把90%做好,10%尽量做好,这倒没事
(2)如果 数据集这种1:9的比例是因为采样没做好(即 10%比例的那类 也是很有意义的时),应该把 10%数据的那类的权重提升,最简单的如 把 该类样本复制为9倍 或 在loss中为其提高权重

35.如果验证集上 loss和epoch的曲线 先下降后上升,就是过拟合
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- AI芯片:推动人工智能革命的引擎
- 杰卡德的故事
- pip install默认安装路径
- 【AWS系列】巧用 G5g 畅游Android流媒体游戏
- Real Fire & Smoke
- 2024深入评测CleanMyMac X4.14.6破解版新的功能
- 答案解析——C语言—第3次作业—算术操作符与关系操作符
- 计算机网络 —— 数据链路层
- Appium+python自动化(六)- 连接模拟器并启动淘宝APP(超详解)
- 如何在自动化测试中使用MitmProxy获取数据返回?