超维空间S2无人机使用说明书——31、使用yolov8进行目标识别
发布时间:2023年12月23日
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。
硬件:D435摄像头,Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic, yolov8
步骤一: 启动摄像头,获取摄像头发布的图像话题
roslaunch realsense2_camera rs_camera.launch
没有出现红色报错,出现如下界面,表明摄像头启动成功
步骤二:启动yolov8识别节点
roslaunch yolov8_ros yolo_v8.launch
launch文件如下,参数use_cpu设置为false,因为实际使用GPU加速,不是CPU跑,另外参数pub_topic是yolov8识别到目标后发布出来的物体在镜头中的位置,程序作了修改,直接给出目标物的中心位置,其中参数image_topic是订阅的节点话题,一定要与摄像头发布的实际话题名称对应上。
<?xml version="1.0" encoding="utf-8"?>
<launch>
<!-- Load Parameter -->
<param name="use_cpu" value="false" />
<!-- Start yolov8 and ros wrapper -->
<node pkg="yolov8_ros" type="yolo_v8.py" name="yolov8_ros" output="screen" >
<param name="weight_path" value="$(find yolov8_ros)/weights/yolov8n.pt"/>
<param name="image_topic" value="/camera/color/image_raw" />
<param name="pub_topic" value="/object_position" />
<param name="camera_frame" value="camera_color_frame"/>
<param name="visualize" value="false"/>
<param name="conf" value="0.3" />
</node>
</launch>
出现如下界面表示yolov8启动成功

步骤三:打开rqt工具,查看识别效果
rqt_image_view

等待出现如下界面后,选择yolov8/detection_image查看yolov8识别效果
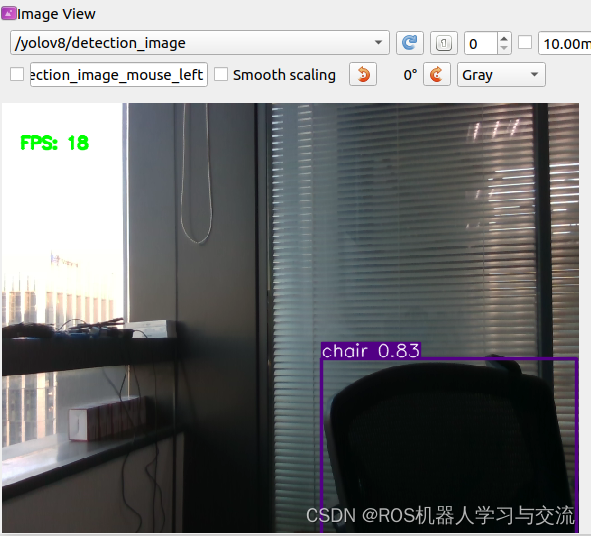
从图中可以看出,在7W功率的情况下,大概在18帧的效果,识别准确度比较高
文章来源:https://blog.csdn.net/qq_35598561/article/details/135169949
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 一份关于Node入门开发指北
- Java面试业务场景之【 如何实现投票逻辑以确保每个用户只能投票一次,如何处理高并发情况下的投票请求?如何实时显示投票结果,如何实现转账逻辑以确保账户余额的正确更新,如何确保转账过程的安全性?】
- SqlAlchemy使用教程(一) 原理与环境搭建
- 打印01点阵图案
- Lua中HTTP头部信息处理的实用技巧
- VC++中使用OpenCV进行人脸检测
- 代码随想录刷题笔记(DAY11)
- 开箱即用的企业级数据和业务管理中后台前端框架Ant Design Pro 5的开箱使用和偏好配置
- 回溯法:N皇后问题
- 应用案例 | 汽车行业基于3D机器视觉引导机器人上下料解决方案