【CANopen】关于STM32中CanFestival的pdo应用
发布时间:2024年01月03日
系列文章目录
使用STM32F407单片机
pdo属于过程数据用来传输实时数据,即单向传输,无需接收节点回应。
一、发送
分为同步传输和异步传输。
1、同步传输
分为循环传输(周期)和非循环传输(非周期)
- 非循环传输
接收到同步报文:
1、如果映射值改变了就发送;
2、如果没有改变就不发送。
把整个pdox对应的映射值给发出去
参数配置:
UNS8 Master_highestSubIndex_obj1800 = 6; /* number of subindex - 1*/
UNS32 Master_obj1800_COB_ID_used_by_PDO = 0x180; /* 384 */
UNS8 Master_obj1800_Transmission_Type = 0x0; /* 0设置为非周期传输 */
UNS16 Master_obj1800_Inhibit_Time = 0x0; /* 0 */
UNS8 Master_obj1800_Compatibility_Entry = 0x0; /* 0 */
UNS16 Master_obj1800_Event_Timer = 0x0; /* 0 */
UNS8 Master_obj1800_SYNC_start_value = 0x0; /* 0 */
2. 循环传输
/* index 0x1800 : Transmit PDO 1 Parameter. */
UNS8 Msater_highestSubIndex_obj1800 = 6; /* number of subindex - 1*/
UNS32 Msater_obj1800_COB_ID_used_by_PDO = 0x180; /* 384 */
UNS8 Msater_obj1800_Transmission_Type = 0x2; /* 2 接收到两个同步报文发送 */
UNS16 Msater_obj1800_Inhibit_Time = 0x0; /* 0 */
UNS8 Msater_obj1800_Compatibility_Entry = 0x0; /* 0 */
UNS16 Msater_obj1800_Event_Timer = 0x0; /* 0 */
UNS8 Msater_obj1800_SYNC_start_value = 0x0; /* 0 */
Msater_obj1800_Transmission_Type = 1 ~ 253表示接收到1~253个同步报文后发送pdo通信,和映射值变化与否没有关系。
2、异步传输
- 内部事件触发
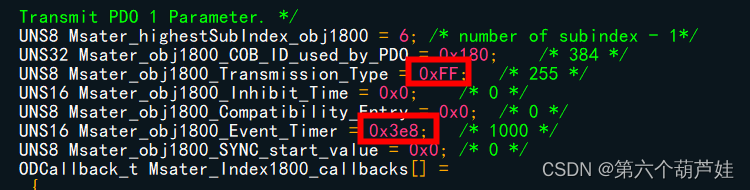
1、定时器触发
Msater_obj1800_Transmission_Type设为0xff,Msater_obj1800_Event_Timer设置定时发送的时间间隔
2、数据改变
Msater_obj1800_Transmission_Type设为0xff
sendPDOevent(&TestMaster_Data);//循环调用这个函数,如果数据改变则会将数据发出
如果同时有两个TPDO数据改变,调用sendPDOevent只能发出靠前的那个TPDO的数据,连续调用两次会发送先改变的那个,两次调用中间加一点延时既可。
还有一种方法是在DS401这些协议中,暂时还没涉及到。
- 远程请求
通过发送与PDO的COB-ID相同的远程帧开触发PDO的发送。
二、接收
接收根据各个RPDO的master_obj1400_COB_ID_used_by_PDO确定,COB-ID确认匹配存入对应的RPDO映射地址中。
- 接收到的数据直接读
直接就在映射里面,接收到新数据即覆盖旧数据。
- 接收到数据触发回调函数
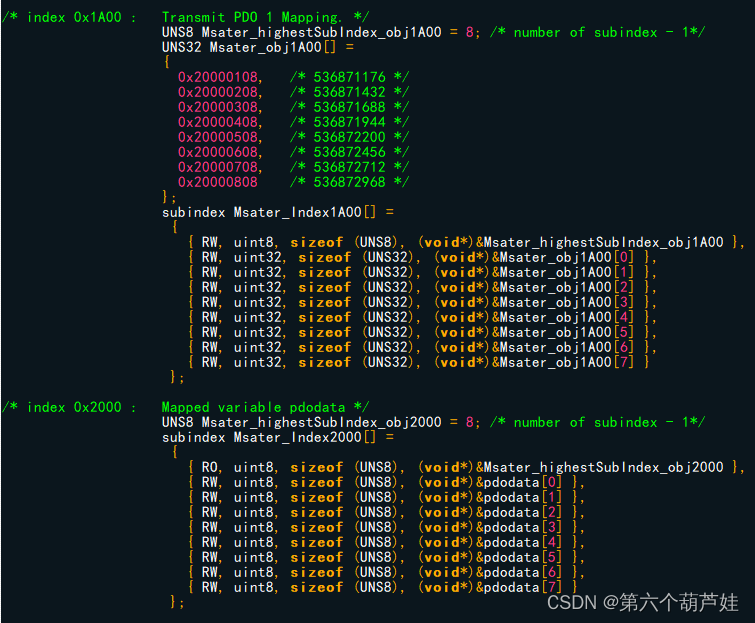
UNS32 index0x2000_0x01_callback(CO_Data* d, const indextable *table, UNS8 bSubindex)//回调函数
{
return OD_SUCCESSFUL;//一定要加,不然该PDO对象的下一个参数就无法修改
}
void CAN_INit(void)
{
RegisterSetODentryCallBack(&CAN_master,0x2000, 1, index0x2000_0x01_callback);//注册回调函数
//0x2000:映射地址
//1:子索引
//index0x2000_0x01_callback:需要注册的回调函数
}
关于注册回调函数中的子索引:
设置为1:即接收的数据存放入子索引1这个位置后触发这个回调函数
也就是可以在接收的任意一个位置注册接收回调函数,想完整接收一帧就放在映射的最后一个索引。
文章来源:https://blog.csdn.net/qq_41214093/article/details/135342647
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Win11怎么重置系统?(小白专享篇)
- 【漏洞复现】Hikvision综合安防管理平台env信息泄漏漏洞
- 541. 反转字符串 II
- 【MATLAB】数据拟合第13期-基于最小二乘支持向量机的拟合
- <VR串流线方案> PICO 4 Pro VR串流线方案 Oculus Quest2 Link串流线方案
- 中国盐水浓缩技术市场前景展望与发展对策建议报告(新版)2024-2030年
- 计算机基础面试题 |03.精选计算机基础面试题
- 免 费 搭 建 小程序商城,打造多商家入驻的b2b2c、o2o、直播带货商城
- 模型评估:A/B测试的陷阱
- 基于Altium Designer 10设计双层印刷电路板的详细步骤