【webrtc】GCC 7: call模块创建的ReceiveSideCongestionController
发布时间:2024年01月18日
从call模块说起
call模块创建的时候,会创建
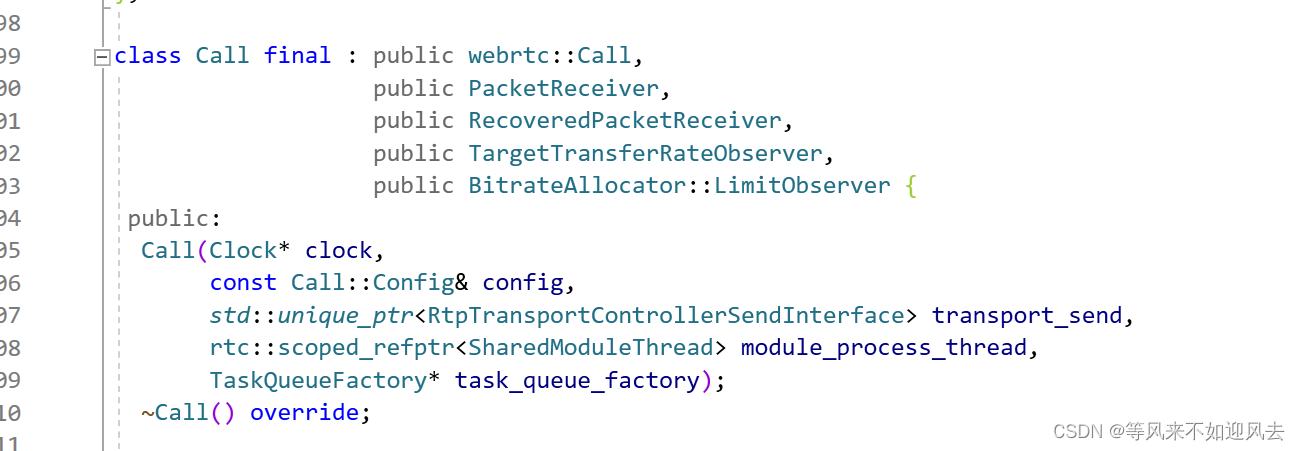
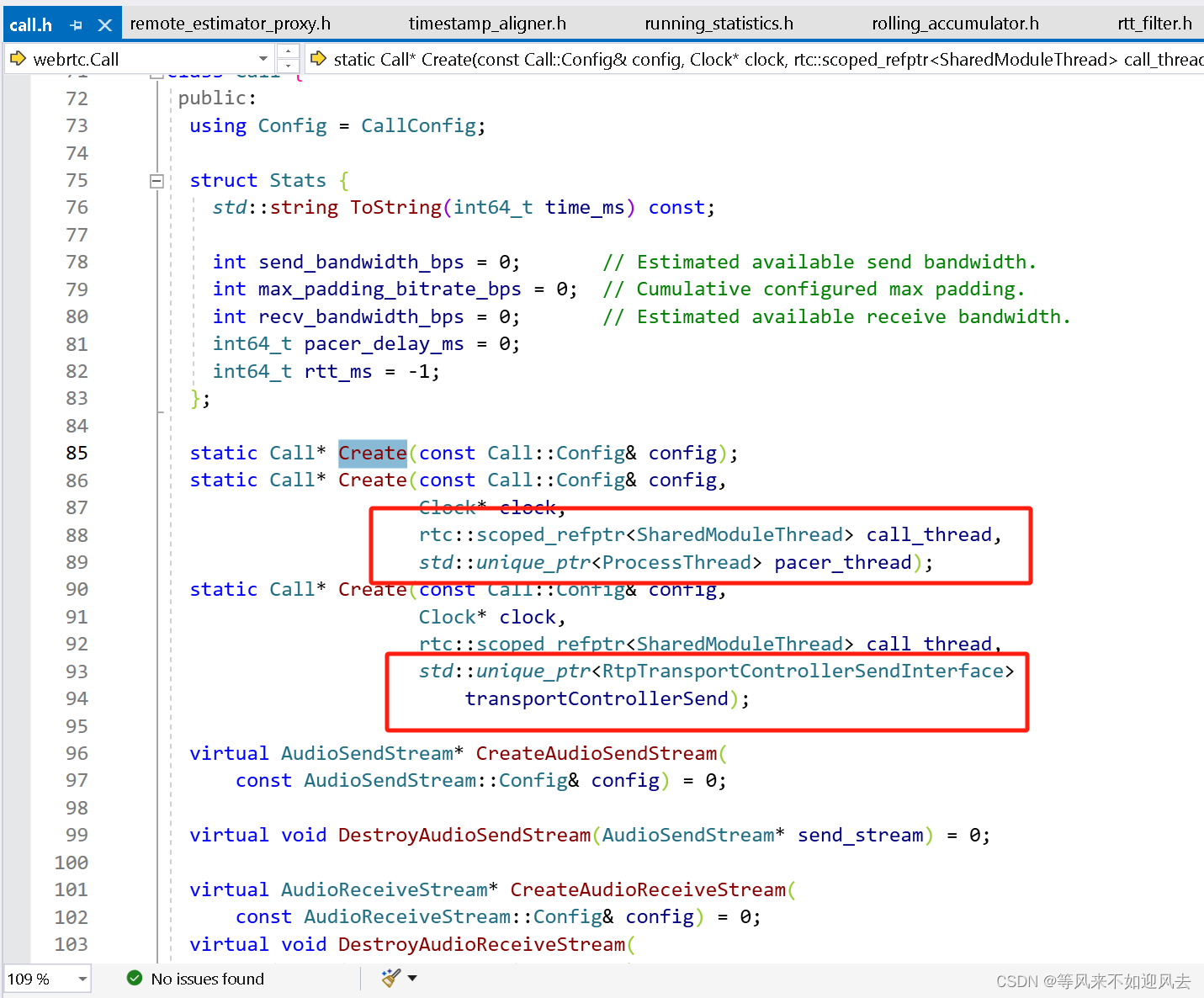
- src\call\call.h
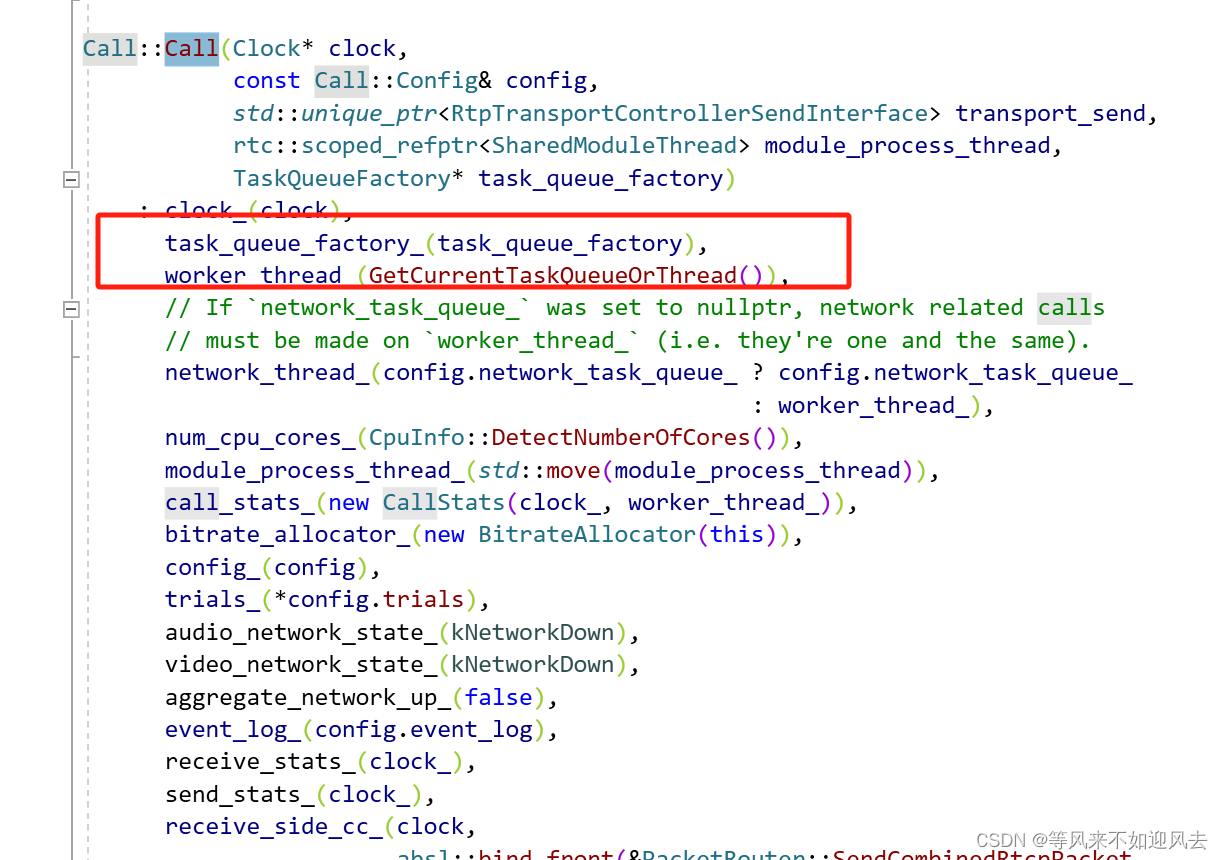
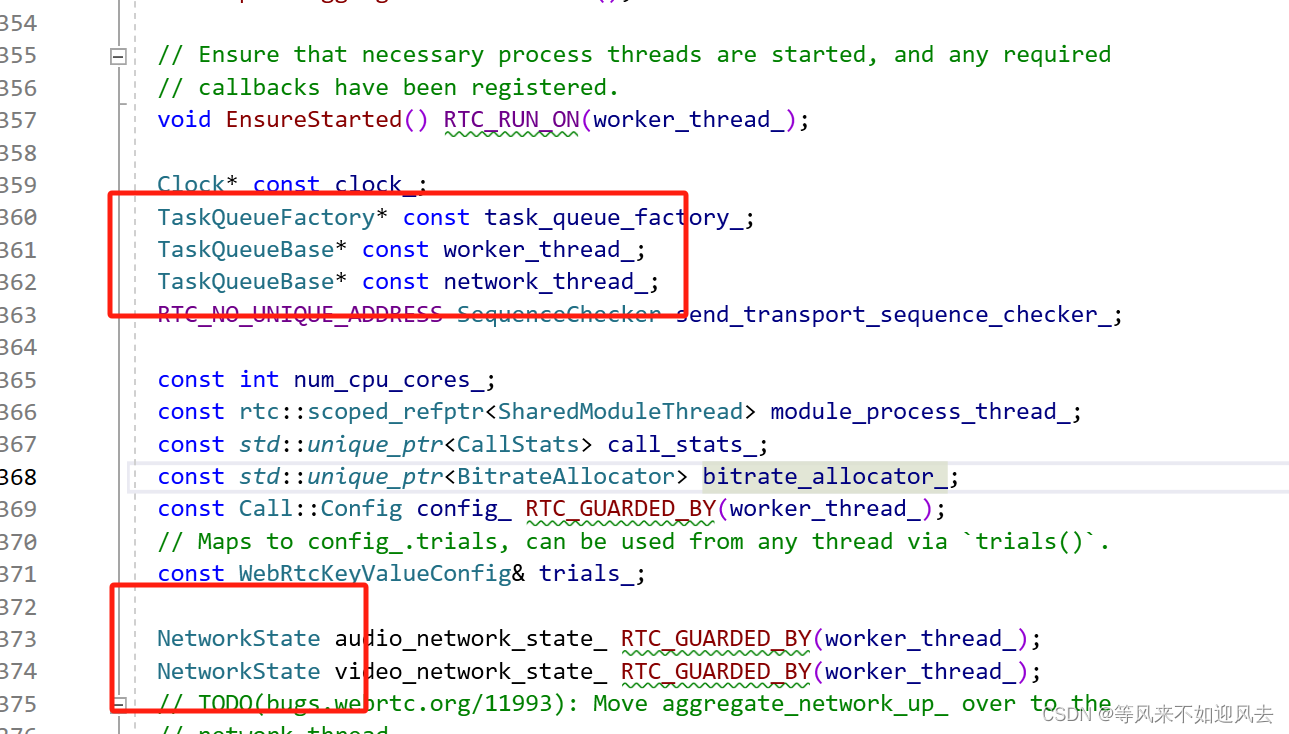
- 线程:
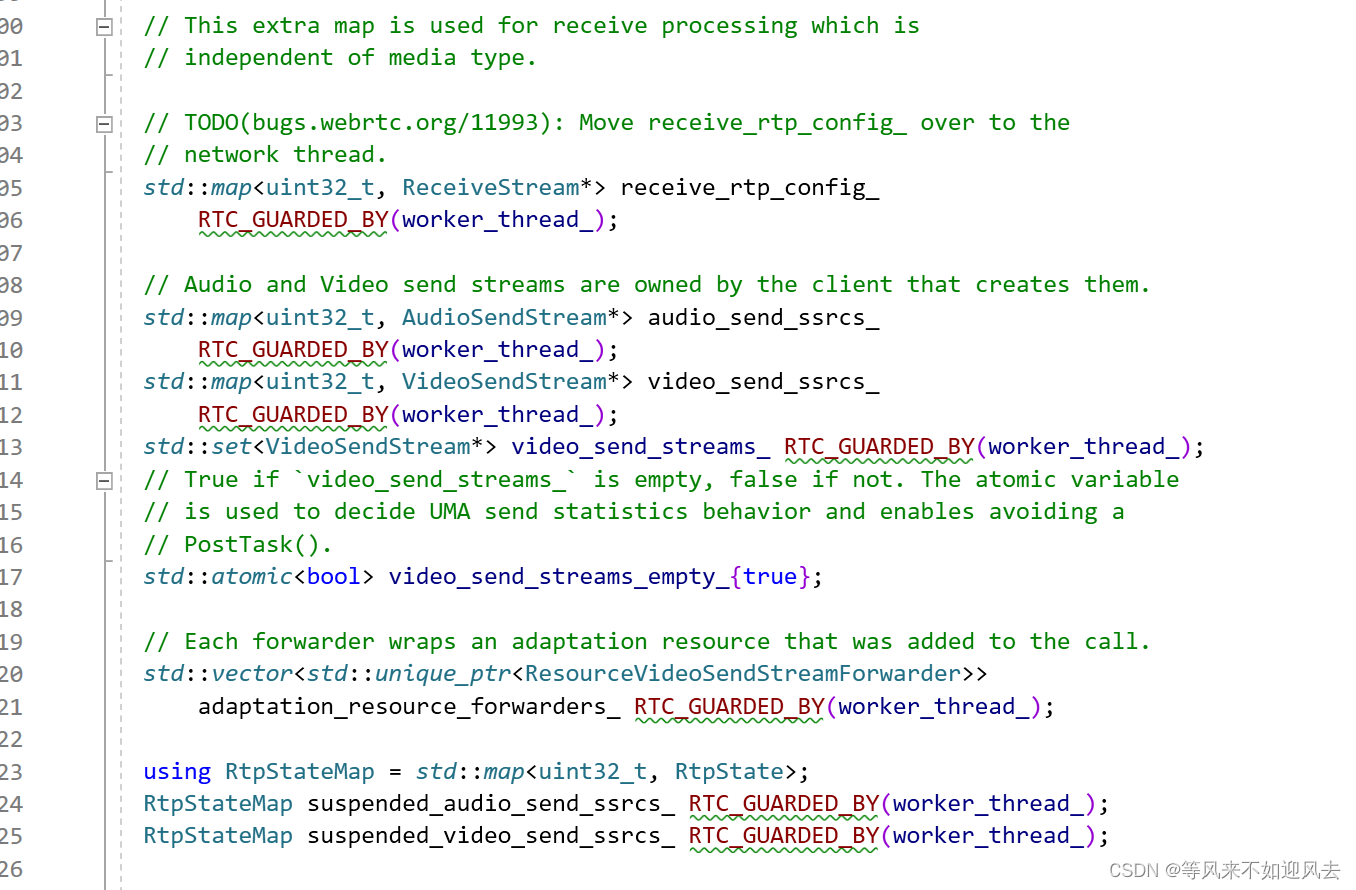
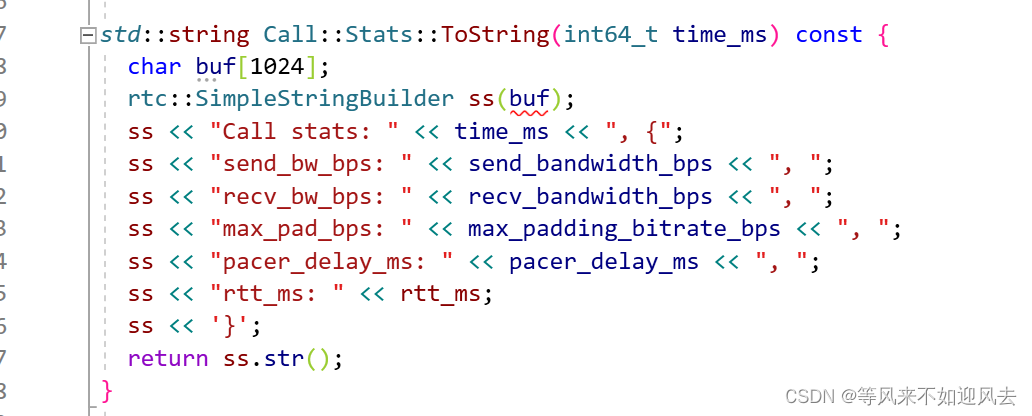
统计
const std::unique_ptr<CallStats> call_stats_;
SendDelayStats : 发送延迟统计
const std::unique_ptr<ReceiveTimeCalculator> receive_time_calculator_;
const std::unique_ptr<SendDelayStats> video_send_delay_stats_;
const Timestamp start_of_call_;
接收统计
// TODO(bugs.webrtc.org/11993) ready to move stats access to the network
// thread.
ReceiveStats receive_stats_ RTC_GUARDED_BY(worker_thread_);
SendStats send_stats_ RTC_GUARDED_BY(send_transport_sequence_checker_);
码率分配
const std::unique_ptr<BitrateAllocator> bitrate_allocator_;
码率
// `last_bandwidth_bps_` and `configured_max_padding_bitrate_bps_` being
// atomic avoids a PostTask. The variables are used for stats gathering.
std::atomic<uint32_t> last_bandwidth_bps_{0};
std::atomic<uint32_t> configured_max_padding_bitrate_bps_{0};
音视频的网络状态
NetworkState audio_network_state_ RTC_GUARDED_BY(worker_thread_);
NetworkState video_network_state_ RTC_GUARDED_BY(worker_thread_);
// TODO(bugs.webrtc.org/11993): Move aggregate_network_up_ over to the
// network thread.
bool aggregate_network_up_ RTC_GUARDED_BY(worker_thread_);
nack ? NackPeriodicProcessor
// Schedules nack periodic processing on behalf of all streams.
NackPeriodicProcessor nack_periodic_processor_;
音视频流 :处理同步?
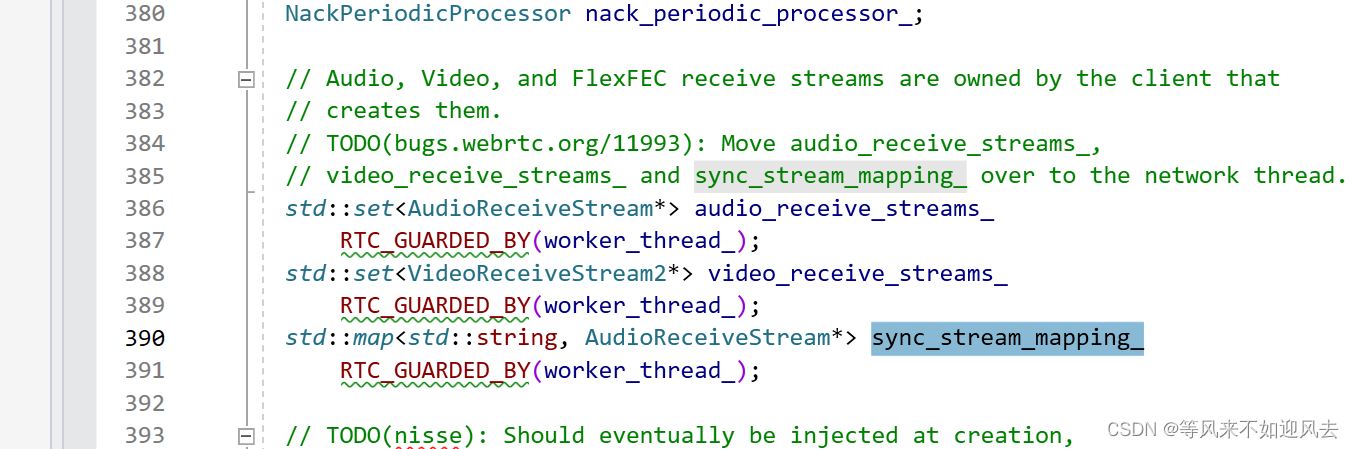
接收测带宽估计?
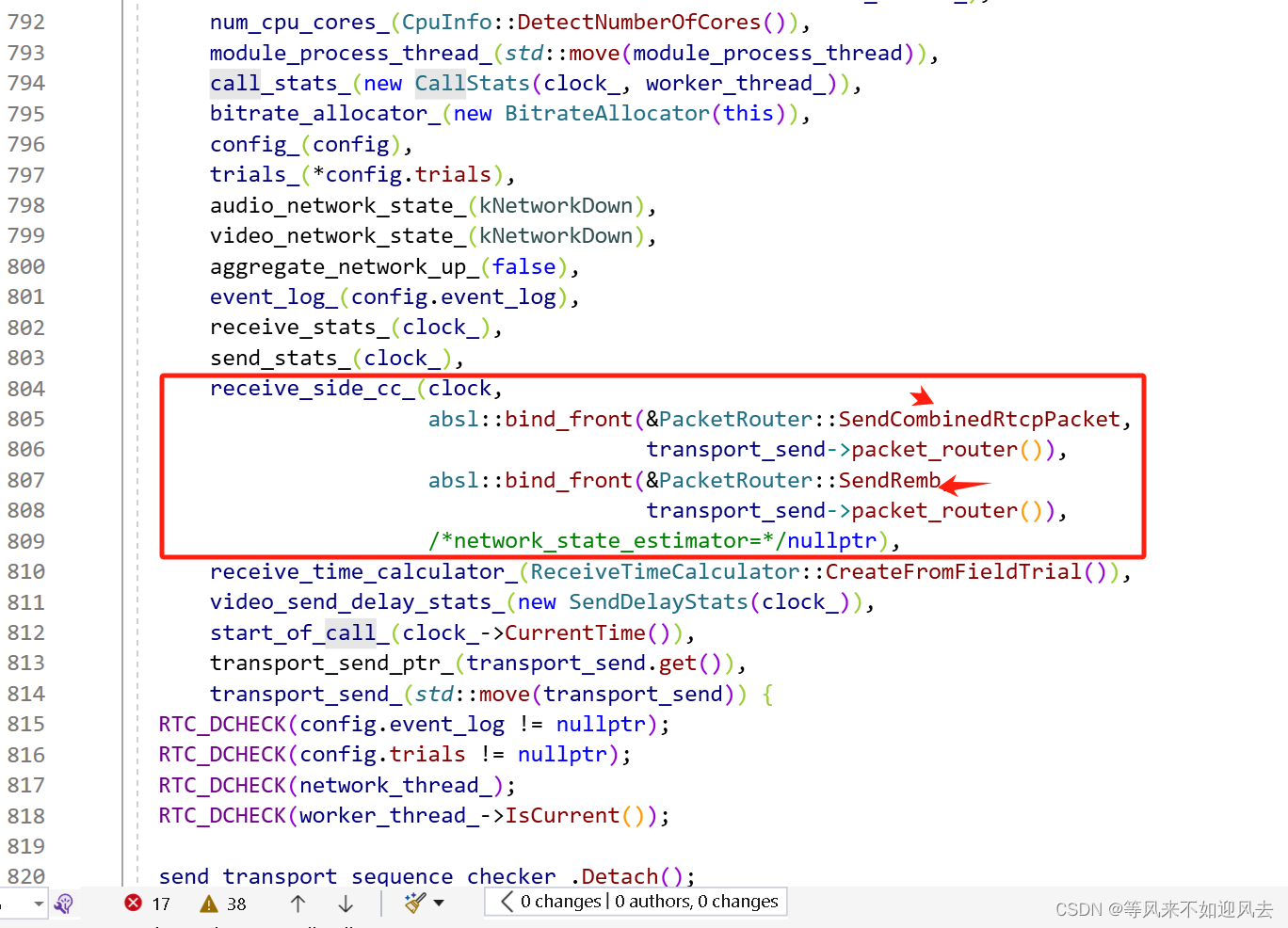
ReceiveSideCongestionController receive_side_cc_;
ReceiveSideCongestionController 会绑定remb 等rtcp包
- 作为一个module 周期执行:

RtpStreamReceiverController 解析rtp rtcp的
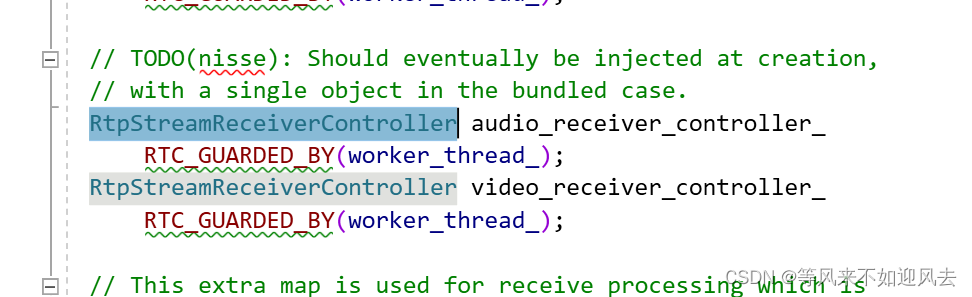
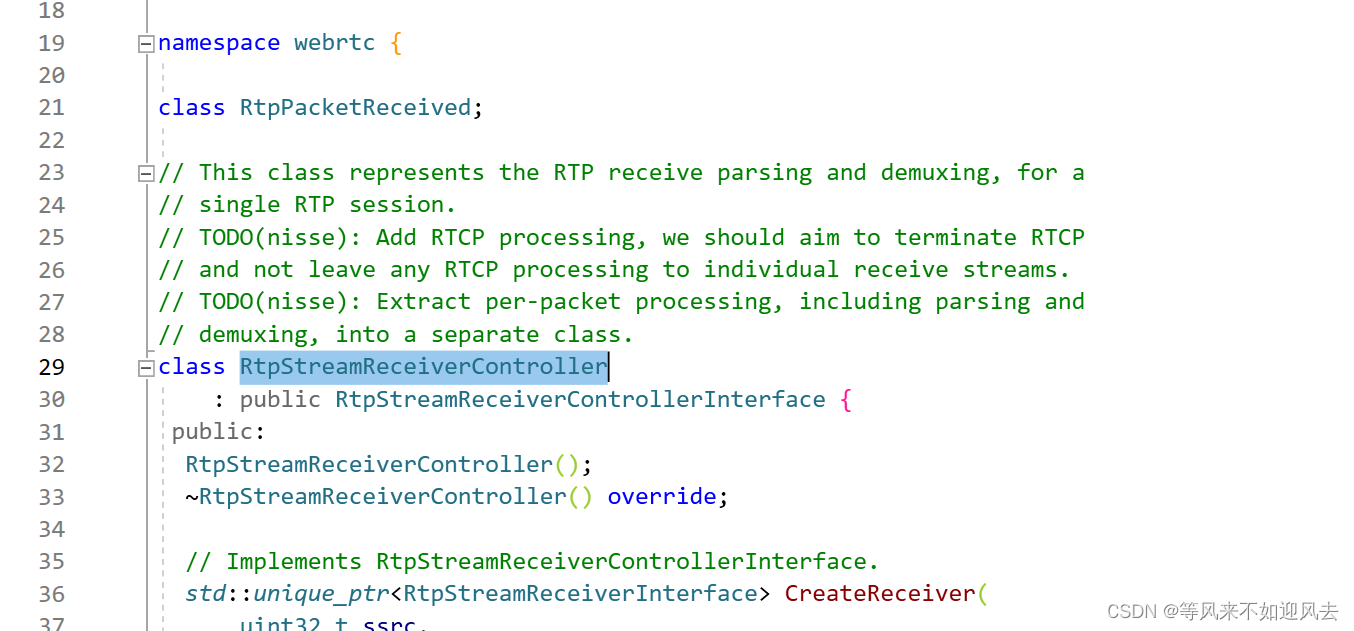
ssrc
发送侧带宽估计
// Note that `task_safety_` needs to be at a greater scope than the task queue
// owned by `transport_send_` since calls might arrive on the network thread
// while Call is being deleted and the task queue is being torn down.
const ScopedTaskSafety task_safety_;
// Caches transport_send_.get(), to avoid racing with destructor.
// Note that this is declared before transport_send_ to ensure that it is not
// invalidated until no more tasks can be running on the transport_send_ task
// queue.
// For more details on the background of this member variable, see:
// https://webrtc-review.googlesource.com/c/src/+/63023/9/call/call.cc
// https://bugs.chromium.org/p/chromium/issues/detail?id=992640
RtpTransportControllerSendInterface* const transport_send_ptr_
RTC_GUARDED_BY(send_transport_sequence_checker_);
// Declared last since it will issue callbacks from a task queue. Declaring it
// last ensures that it is destroyed first and any running tasks are finished.
const std::unique_ptr<RtpTransportControllerSendInterface> transport_send_;
bool is_started_ RTC_GUARDED_BY(worker_thread_) = false;
RTC_NO_UNIQUE_ADDRESS SequenceChecker sent_packet_sequence_checker_;
absl::optional<rtc::SentPacket> last_sent_packet_
RTC_GUARDED_BY(sent_packet_sequence_checker_);
RTC_DISALLOW_COPY_AND_ASSIGN(Call);
call 模块可提供rtt bwe 等信息
m114 中 ReceiveSideCongestionController 依然存在

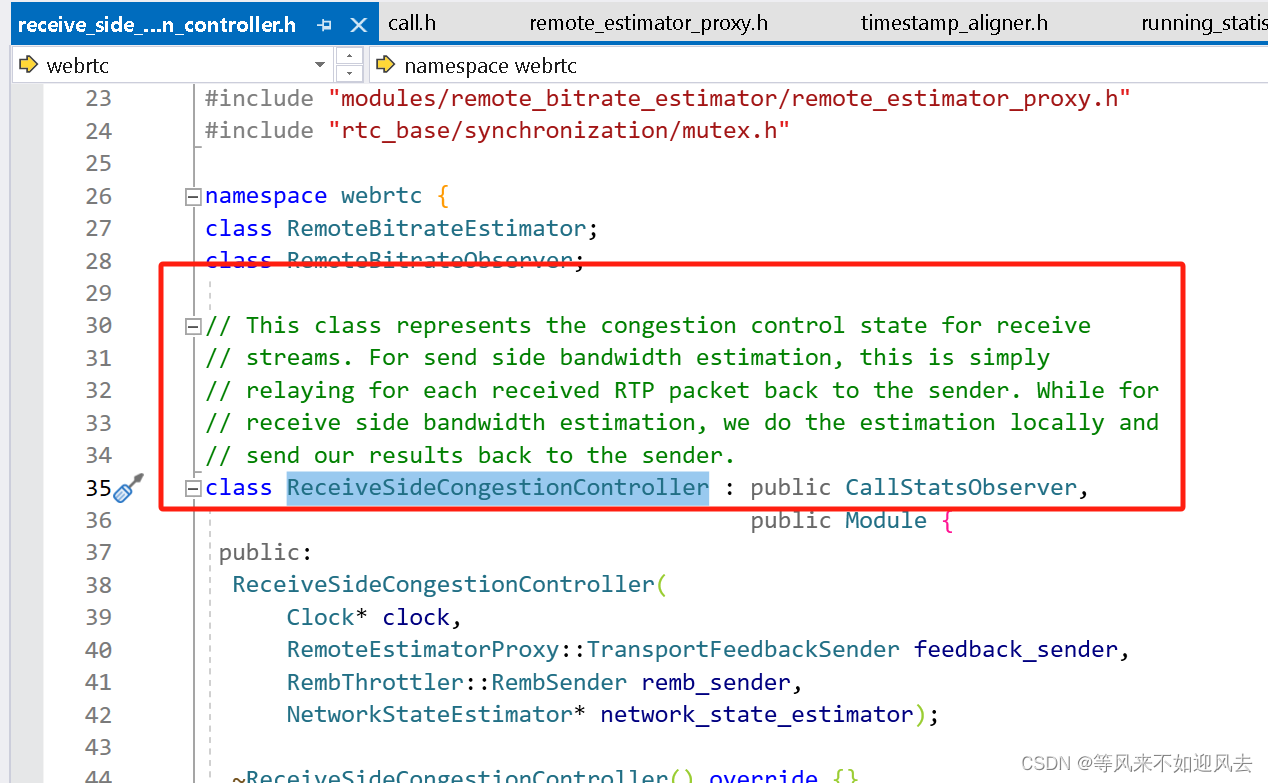
ReceiveSideCongestionController 用于做带宽估计
-
2022的版本,只在接收端做估计即可?

对外API封装在ReceiveSideCongestionController类中,顾名思义这一个基于接收端的拥塞控制算法。ReceiveSideCongestionController 类的构造函数,用于创建一个接收端拥塞控制器对象,以保证数据传输的稳定性和可靠性。该类对象需要提供时钟、传输反馈信息发送函数、REMB 消息发送函数和网络状态估计器等信息,用于进行拥塞控制和比特率调整等操作。
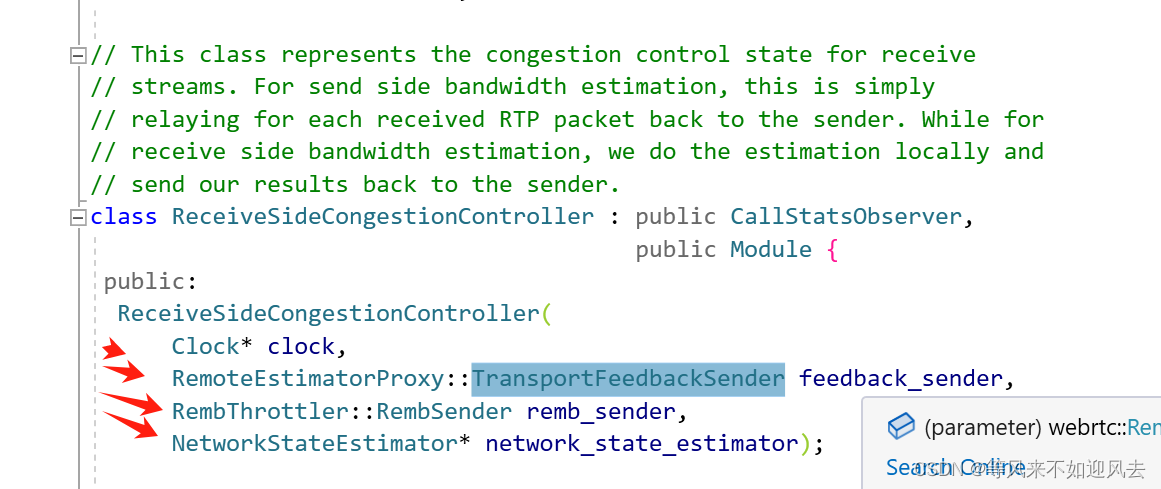
- RemoteEstimatorProxy : 远程估计代理
- RembThrottler::RembSender remb_sender, // REMB发送器
- NetworkStateEstimator* network_state_estimator); // 网络状态估计器
-
-
ReceiveSideCongestionController 对于接收流做拥塞控制
- 对于发送侧的带宽估计,这个类可以直接代理每个接收到的rtp包的信息 发送给发送者。
- 对于接收测的带宽估计,这个类自己就可以本地估计并且发送结果给发送端。
-
LearningWebRTC: 拥塞控制 大神也是这么认为的:
-
在接收端:ReceiveSideCongestionController则把包的大小和到达时间转发给RemoteBitrateEstimatorProxy,然后以RTCP RTPFB包发给发送端。
-
在发送端:收到RTCP RTPFB包后,转给SendSideCongestionController并在DelayBasedBwe里完成带宽估计。
文章来源:https://blog.csdn.net/commshare/article/details/135682068
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 怎么重构数据库表结构
- leetcode 每日一题 2024年01月07日 赎金信
- 1867_noweb简介
- 【动态规划】路径问题
- Dubbo 3.2版本分析Provider启动前的前菜
- 大创项目推荐 深度学习 机器视觉 车位识别车道线检测 - python opencv
- 数据分析师不加班的秘密,三行代码教你Python自动发送邮件
- 抖店需要多少资金?如何开通?具体流程如下!
- 提升思维能力,高效管理信息——推荐使用SimpleMind Pro(思维导图)应用
- 【ESP32运行MicroPython】查看开发板内存与外存