Open3D离群点剔除
发布时间:2024年01月13日
?
import time
import open3d as o3d;
import numpy as np;
import matplotlib.pyplot as plt
from scipy.signal import find_peaks
import pandas as pd
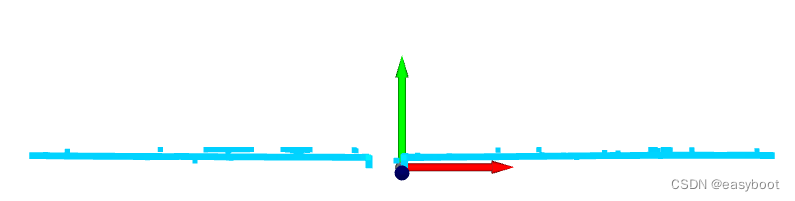
OriginalPly = o3d.io.read_point_cloud("source/Glue4.ply")
cl, ind = OriginalPly.remove_statistical_outlier(nb_neighbors=600, std_ratio=2.0)
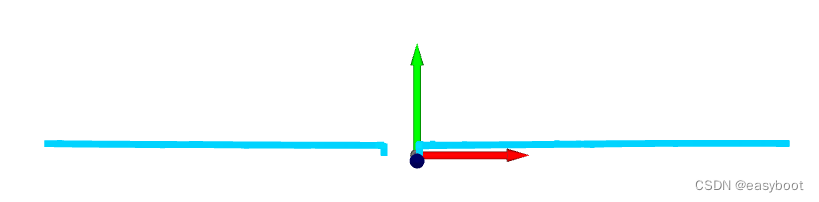
o3d.visualization.draw_geometries([ cl,mesh_coord_frame],window_name="剔除离群点后的结果") ?
在这个例子中,
remove_statistical_outlier方法就是用来移除离群点的。这个方法有两个参数:nb_neighbors和std_ratio。
nb_neighbors参数用来指定每个点的邻居数量,std_ratio参数用来确定剔除哪些点。如果一个点的距离大于平均距离加上std_ratio倍的标准差,那么这个点就会被认为是离群点,并被剔除。以上是一个基本的示例,实际使用时可能需要根据具体的点云数据和需求进行调整。
剔除前
 ?剔除后
?剔除后
文章来源:https://blog.csdn.net/easyboot/article/details/135574616
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【Python_PySide2学习笔记(十九)】单行文本框QLineEdit类设置输入校验器Validator
- 网络安全习题——附答案
- 【Let‘s Encrypt SSL】使用 acme.sh 给 Nginx 安装 Let’s Encrypt 提供的免费 SSL 证书
- 期末成绩不公开怎么发成绩?
- 加密钱包监控:守护企业资产与信誉的利器
- LaTeX中的框以及框中的子图
- UE5 C++ 学习笔记 UBT UHT 和 一些头文件
- 黑客技术(网络安全)自学1.0
- Netty学习之NIO基础
- HTTPS协议把什么加密了?