【C++】多态
多态的概念
多态,即多种形态,具体指完成某个行为,不同的对象完成时,产生不同的状态。
比如买票,成人买票全价,儿童买票半价,军人买票优先,不同的对象调用同一个买票相关的函数,产生的行为是不同的。
构成多态的两个条件:
1. 必须通过基类的指针或者引用调用虚函数2. 被调用的函数必须是虚函数,且派生类必须对基类的虚函数进行 重写虚函数:即被 virtual 修饰的类成员函数称为虚函数虚函数的重写 ( 覆盖 ) : 派生类中有一个跟基类完全相同的虚函数 ( 即派生类虚函数与基类虚函数的 返回值类型、函数名字、参数列表完全相同 ) ,称子类的虚函数重写了基类的虚函数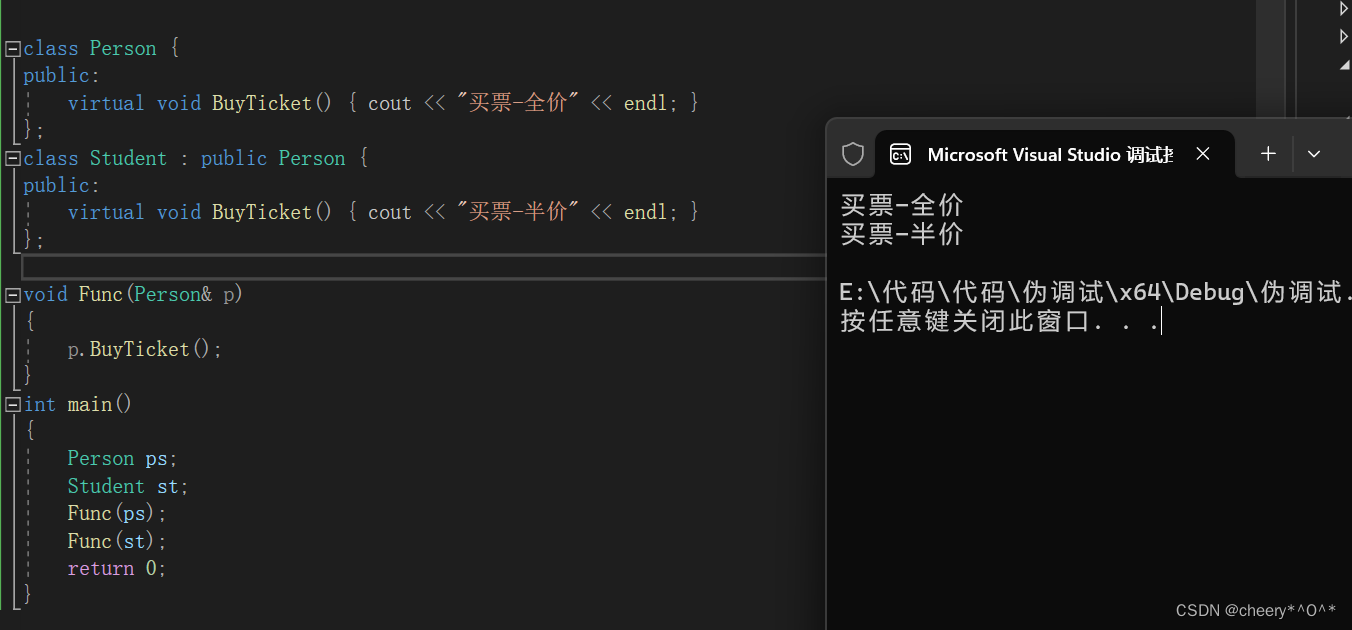

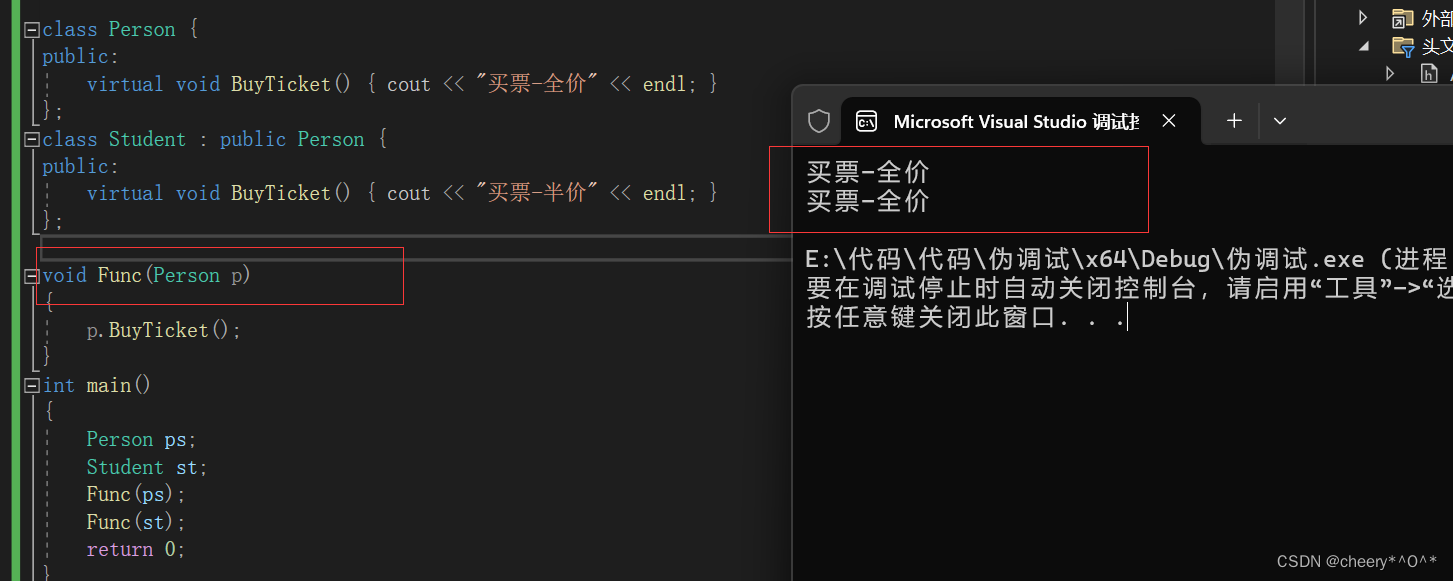 按照我们继承的相关知识,Func传参是用父类对象的引用接收的,实参传递父类对象正常接收,实参传子类对象进行切片处理,当父子类满足多态条件时,会分别调用父子类的函数;当不满足父子类多态条件时(上述两个条件缺一不可),那么只看当前接收的类型,由于当前接收类型为父类,所以输出结构均为:买票-全价。一句话: 多态调用看的是指向的对象,普通对象只看当前类型
按照我们继承的相关知识,Func传参是用父类对象的引用接收的,实参传递父类对象正常接收,实参传子类对象进行切片处理,当父子类满足多态条件时,会分别调用父子类的函数;当不满足父子类多态条件时(上述两个条件缺一不可),那么只看当前接收的类型,由于当前接收类型为父类,所以输出结构均为:买票-全价。一句话: 多态调用看的是指向的对象,普通对象只看当前类型
虚函数的重写
在重写基类虚函数时,派生类的虚函数在不加 virtual 关键字时,虽然也可以构成重写 ( 因为继承后基类的虚函数被继承下来了在派生类依旧保持虚函数属性), 但是该种写法不是很规范,不建议这样使用。1. 协变 ( 基类与派生类虚函数返回值类型不同 )派生类重写基类虚函数时,与基类虚函数返回值类型不同。即基类虚函数返回基类对象的指针或者引用,派生类虚函数返回派生类对象的指针或者引用时,称为协变。2. 析构函数的重写 ( 基类与派生类析构函数的名字不同 )如果基类的析构函数为虚函数,此时派生类析构函数只要定义,无论是否加 virtual 关键字,都与基类的析构函数构成重写,虽然基类与派生类析构函数名字不同。虽然函数名不相同,看起来违背了重写的规则,其实不然,这里可以理解为编译器对析构函数的名称做了特殊处理,编译后析构函数的名称统一处理成destructor(同名保证符合多态重写条件) 。为什么一定要处理成重写呢?因为如果子类成员变量中涉及空间申请,那么就需要在析构函数中释放,如果不重写,父子类析构函数名均为destructor,调用哪个析构函数取决于动态申请时涉及的那个指针类型,如果类型为父类对象的指针,那么不管new时new的是子类对象还是父类对象,都会被看作父类指针,仅仅调用父类析构,这样就会造成内存泄漏。
c++11 override&final
1. final :修饰虚函数,表示该虚函数不能再被重写class Car { public: virtual void Drive() final {} }; class Benz :public Car { public: virtual void Drive() {cout << "Benz-舒适" << endl;} };final也可修饰类使其成为最终类,这样这个类就不会被继承。2. override: 检查派生类虚函数是否重写了基类某个虚函数,如果没有重写编译报错class Car{ public: virtual void Drive(){} }; class Benz :public Car { public: virtual void Drive() override {cout << "Benz-舒适" << endl;} };
重定义(隐藏)与重写(覆盖)都要求两个函数分别在基类和派生类的作用域,再加上三同(函数名&返回值&参数) (重写中协变除外) 区别就在于,重写要求两个函数必须是虚函数。也就是说,两个基类和派生类的同名函数,不构成重写就是重定义(重写是重定义的子集)。
抽象类
在虚函数的后面写上 =0 ,则这个函数为纯虚函数。 包含纯虚函数的类叫做抽象类(也叫接口 类),抽象类不能实例化出对象 。派生类继承后也不能实例化出对象,只有重写纯虚函数,派生类才能实例化出对象。纯虚函数规范了派生类必须重写,另外纯虚函数更体现出了接口继承。class Car { public: virtual void Drive() = 0; }; class Benz :public Car { public: virtual void Drive() { cout << "Benz-舒适" << endl; } }; class BMW :public Car { public: virtual void Drive() { cout << "BMW-操控" << endl; } }; void Test() { Car* pBenz = new Benz; pBenz->Drive(); Car* pBMW = new BMW; pBMW->Drive(); } int main() { Test(); return 0; }普通函数的继承是一种实现继承,派生类继承了基类函数,可以使用函数,继承的是函数的实现。虚函数的继承是一种接口继承,派生类继承的是基类虚函数的接口,目的是为了重写,达成多态,继承的是接口。所以如果不实现多态,不要把函数定义成虚函数。
多态基本原理
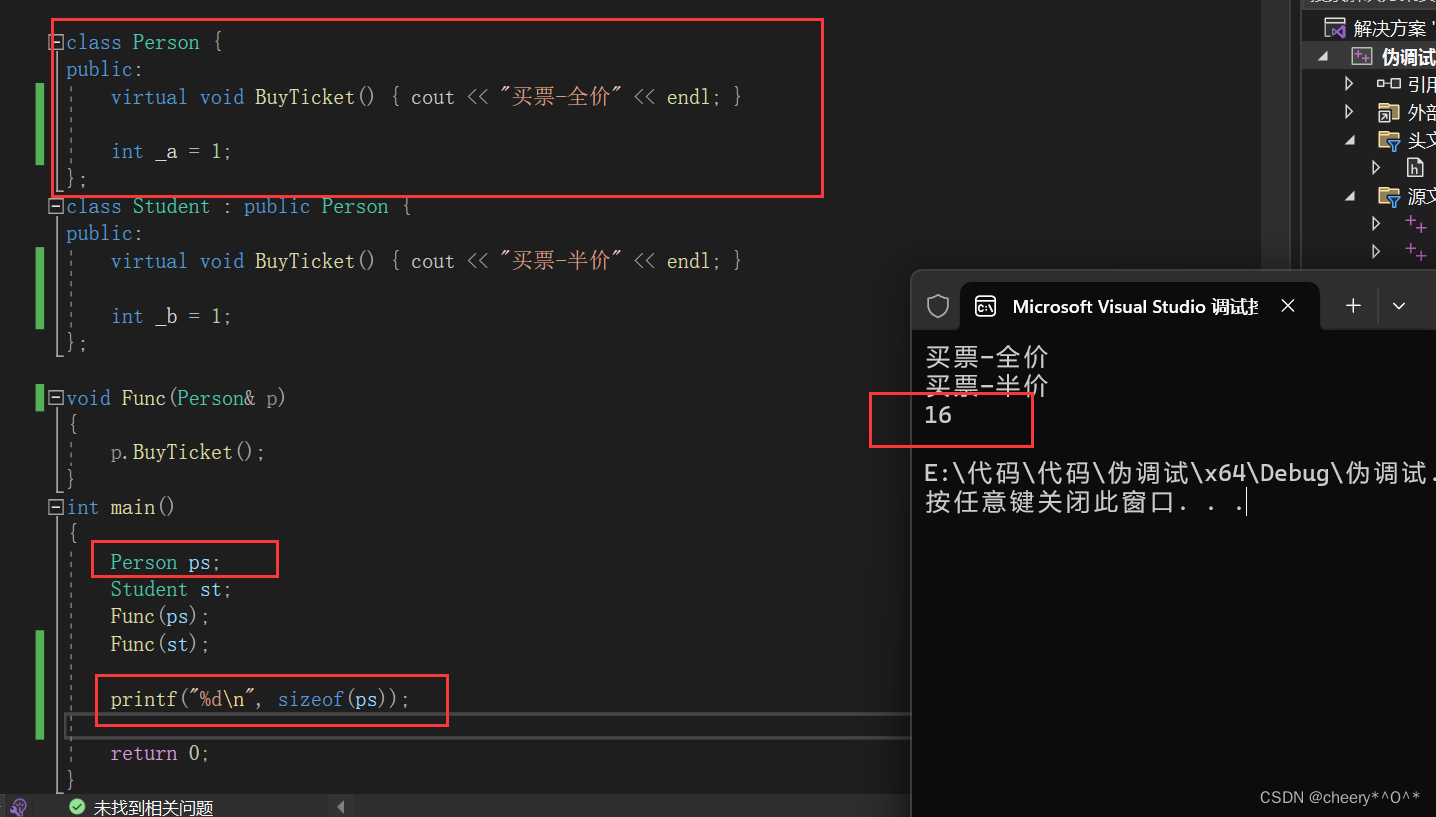 首先我们观察一下Person对象的大小,在64位机器下算出的大小是16(32位机器下是8),为什么这里Person里只有一个整型加一个虚函数得到的结果是16呢,那么这里的虚函数不是函数吗,按照以往处理函数的方式,在计算大小时,函数是不计入的,也就是说结果应该是4,ok让我们继续往下看
首先我们观察一下Person对象的大小,在64位机器下算出的大小是16(32位机器下是8),为什么这里Person里只有一个整型加一个虚函数得到的结果是16呢,那么这里的虚函数不是函数吗,按照以往处理函数的方式,在计算大小时,函数是不计入的,也就是说结果应该是4,ok让我们继续往下看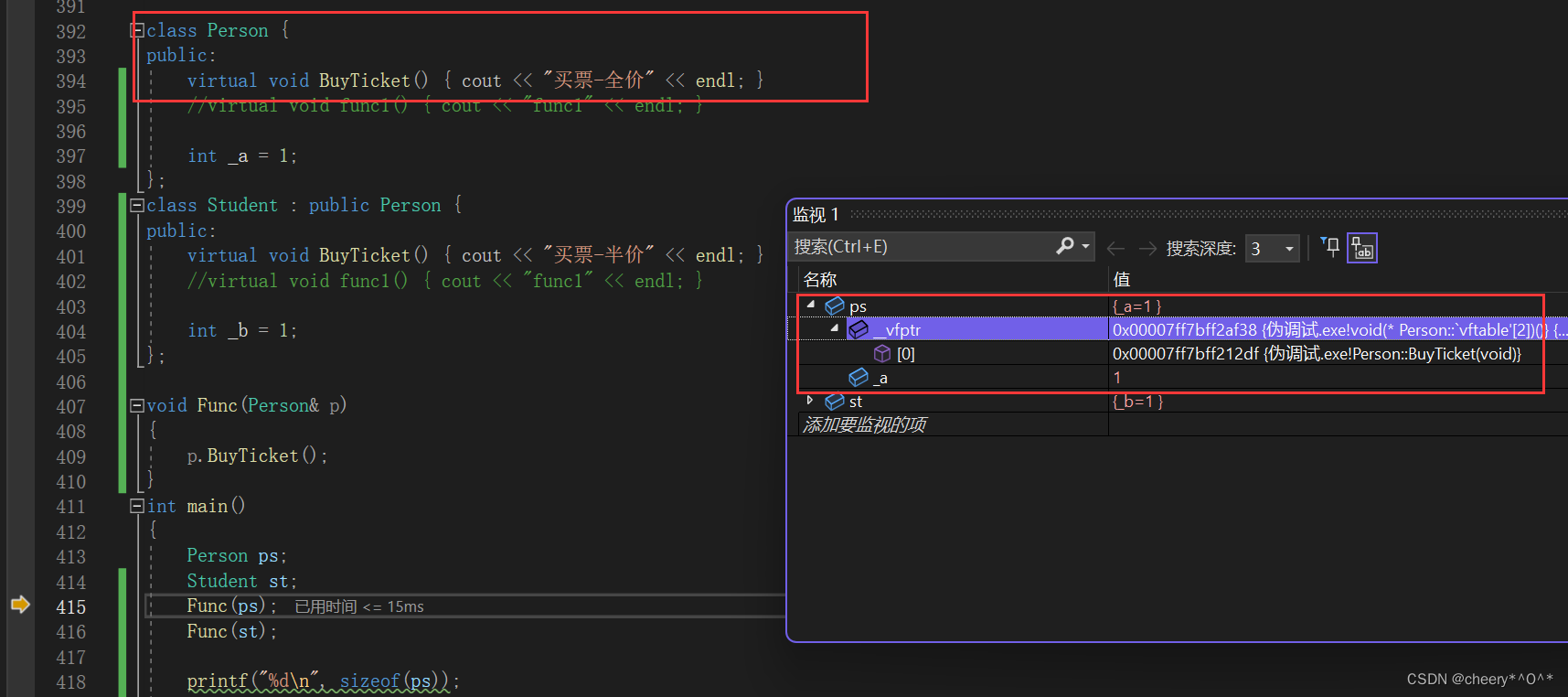 通过调试我们发现,ps这个父类对象中不仅包含_a变量,还包含一个名为 _vfptr的指针,那么二者相加再加上内存对齐规则就明白为什么大小为16了。对象中的这个指针我们叫做 虚函数表指针(v代表virtual,f代表function)一个含有虚函数的类中都至少都有一个虚函数表指针,因为虚函数的地址要被放到虚函数表中,虚函数表也简称虚表。
通过调试我们发现,ps这个父类对象中不仅包含_a变量,还包含一个名为 _vfptr的指针,那么二者相加再加上内存对齐规则就明白为什么大小为16了。对象中的这个指针我们叫做 虚函数表指针(v代表virtual,f代表function)一个含有虚函数的类中都至少都有一个虚函数表指针,因为虚函数的地址要被放到虚函数表中,虚函数表也简称虚表。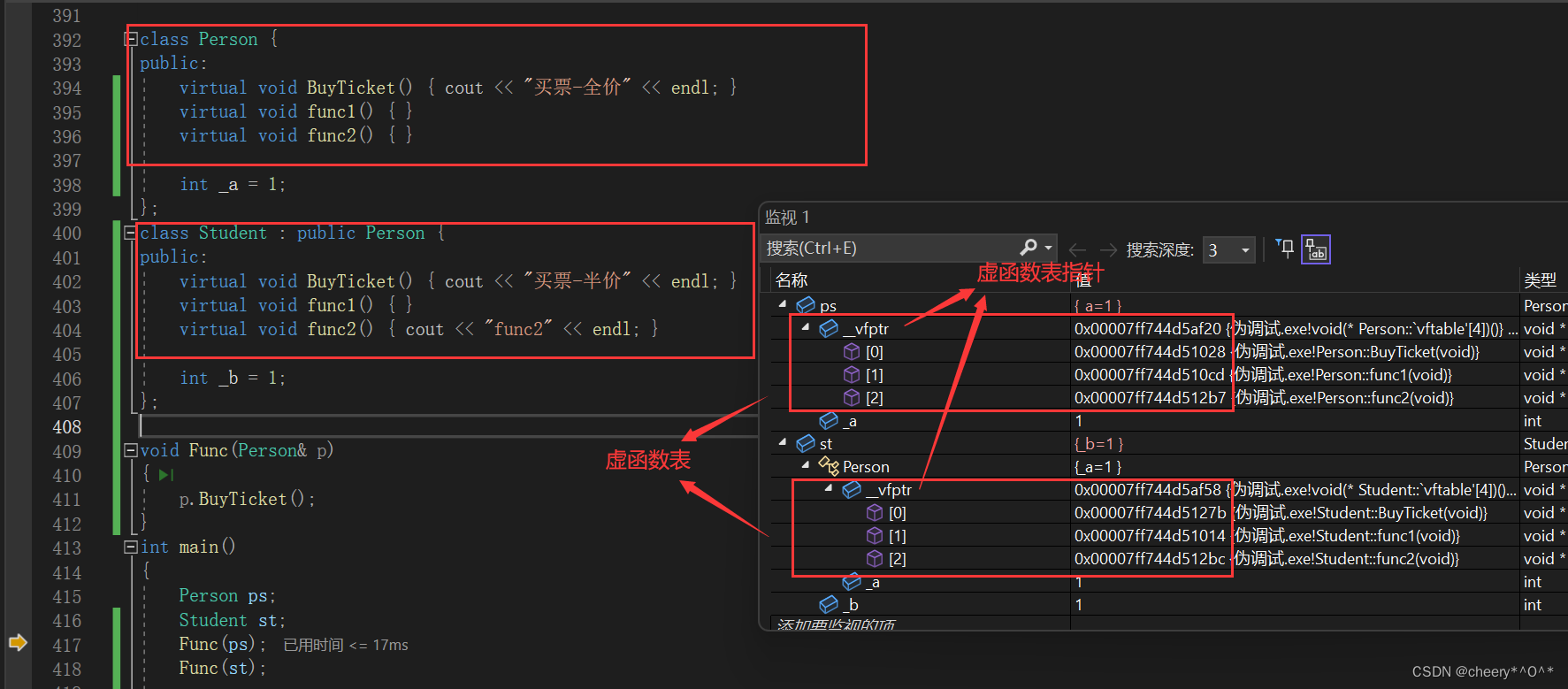 这里也就大致知道了为什么父类指针或引用接收父类对象或者子类对象都可以区分开的原因了:即使子类进行切片后得到的结构跟父类相同,但是 二者的虚函数表不同,因此运行时根据虚函数表找到的函数指针也就不同,因此呈现出多态。总结一下派生类的虚表生成: a. 先将基类中的虚表内容拷贝一份到派生类虚表中 b. 如果派生类重写了基类中某个虚函数,用派生类自己的虚函数覆盖虚表中基类的虚函数?c. 派生类自己新增加的虚函数按其在派生类中的声明次序增加到派生类虚表的最后。
这里也就大致知道了为什么父类指针或引用接收父类对象或者子类对象都可以区分开的原因了:即使子类进行切片后得到的结构跟父类相同,但是 二者的虚函数表不同,因此运行时根据虚函数表找到的函数指针也就不同,因此呈现出多态。总结一下派生类的虚表生成: a. 先将基类中的虚表内容拷贝一份到派生类虚表中 b. 如果派生类重写了基类中某个虚函数,用派生类自己的虚函数覆盖虚表中基类的虚函数?c. 派生类自己新增加的虚函数按其在派生类中的声明次序增加到派生类虚表的最后。 图中func1未重写因此父子类对应的虚表中func1的地址相同;其他虚函数重写了,因此进行了覆盖,地址发生变化。
图中func1未重写因此父子类对应的虚表中func1的地址相同;其他虚函数重写了,因此进行了覆盖,地址发生变化。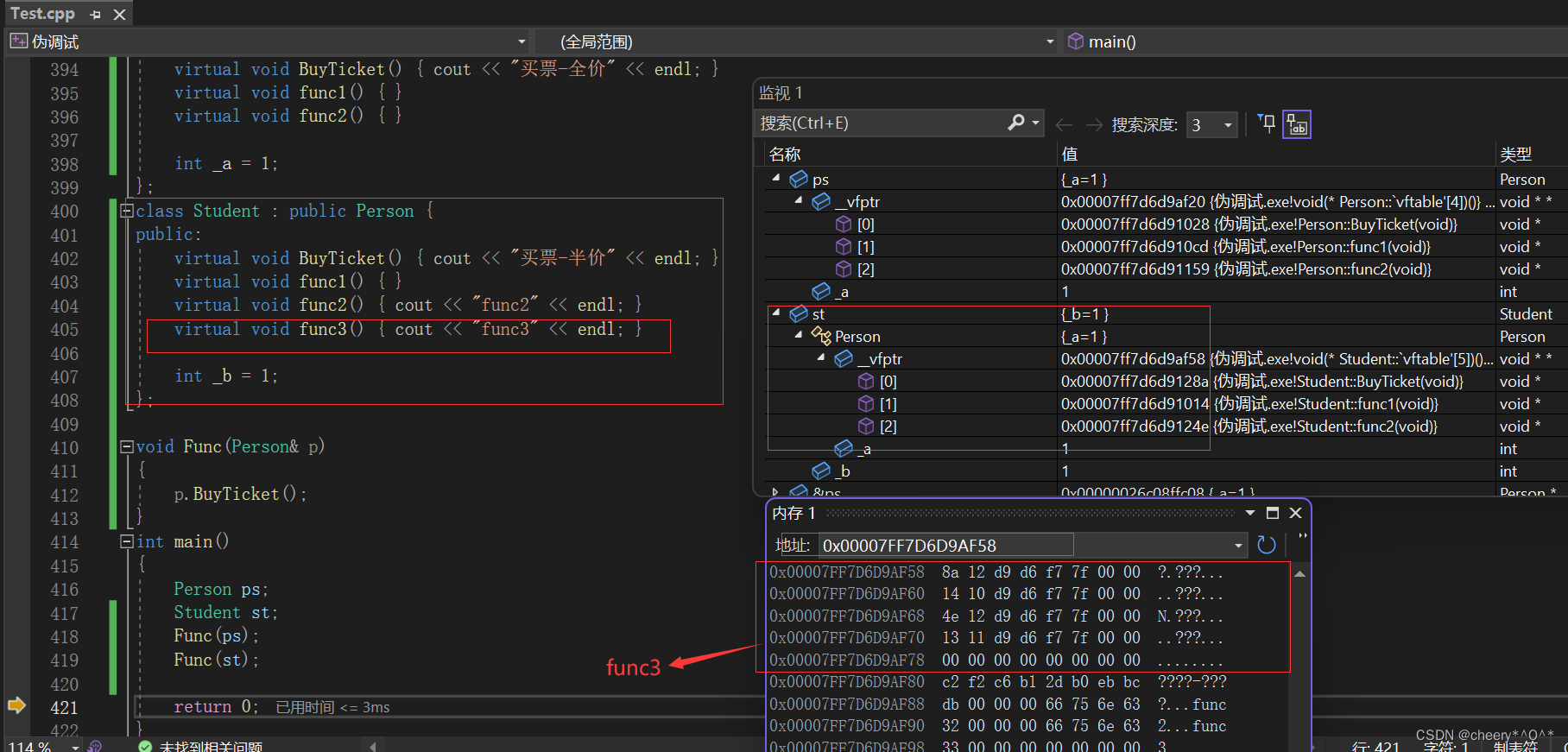 派生类自己新增加的虚函数按其在派生类中的声明次序增加到派生类虚表的最后,这条总结虽然在内存中可以看到确实在最后存在一个地址,但是否是新增的func3的地址,我们需要验证:首先我们捋一下验证思路:要想验证这个内存中看到的地址是否是func3的地址,首先需要得到虚表的地址(因为func3作为虚函数,指向它的函数指针一定会存在虚表中,且根据总结一定是最后一个地址),虚表的地址是通过vfptr这个指针得到的,而vfptr又是ps对象的指针变量,因此我们可以&ps得到一个指向ps对象的指针(相当与person*),但是我们只需要该指针指向vfptr这部分,由于vfptr是一个指针,其所占大小在32位机器下是4字节,64位机器下是8字节,因此我们需要从ps对象中截取出所需要的字节,为了使得该方法适用于32或者64位机器,我们可以将&ps强转成一个int**的二级指针,因为对一个int**类型的指针进行解引用得到的依然是一个指针,既然是指针那么就满足其在32位机器下是4字节,64位机器下是8字节,强转之后进行解引用就得到了vfptr这个函数指针对应的地址,那么接下来就只需写一个打印函数,通过将这个函数指针的地址传递给打印函数(由于这里拿到的vfptr的地址是int*,所以传参时需要强转成函数指针),就可以打印出指向的虚表内容了,再将打印内容跟内存作比较就可以得出结论。
派生类自己新增加的虚函数按其在派生类中的声明次序增加到派生类虚表的最后,这条总结虽然在内存中可以看到确实在最后存在一个地址,但是否是新增的func3的地址,我们需要验证:首先我们捋一下验证思路:要想验证这个内存中看到的地址是否是func3的地址,首先需要得到虚表的地址(因为func3作为虚函数,指向它的函数指针一定会存在虚表中,且根据总结一定是最后一个地址),虚表的地址是通过vfptr这个指针得到的,而vfptr又是ps对象的指针变量,因此我们可以&ps得到一个指向ps对象的指针(相当与person*),但是我们只需要该指针指向vfptr这部分,由于vfptr是一个指针,其所占大小在32位机器下是4字节,64位机器下是8字节,因此我们需要从ps对象中截取出所需要的字节,为了使得该方法适用于32或者64位机器,我们可以将&ps强转成一个int**的二级指针,因为对一个int**类型的指针进行解引用得到的依然是一个指针,既然是指针那么就满足其在32位机器下是4字节,64位机器下是8字节,强转之后进行解引用就得到了vfptr这个函数指针对应的地址,那么接下来就只需写一个打印函数,通过将这个函数指针的地址传递给打印函数(由于这里拿到的vfptr的地址是int*,所以传参时需要强转成函数指针),就可以打印出指向的虚表内容了,再将打印内容跟内存作比较就可以得出结论。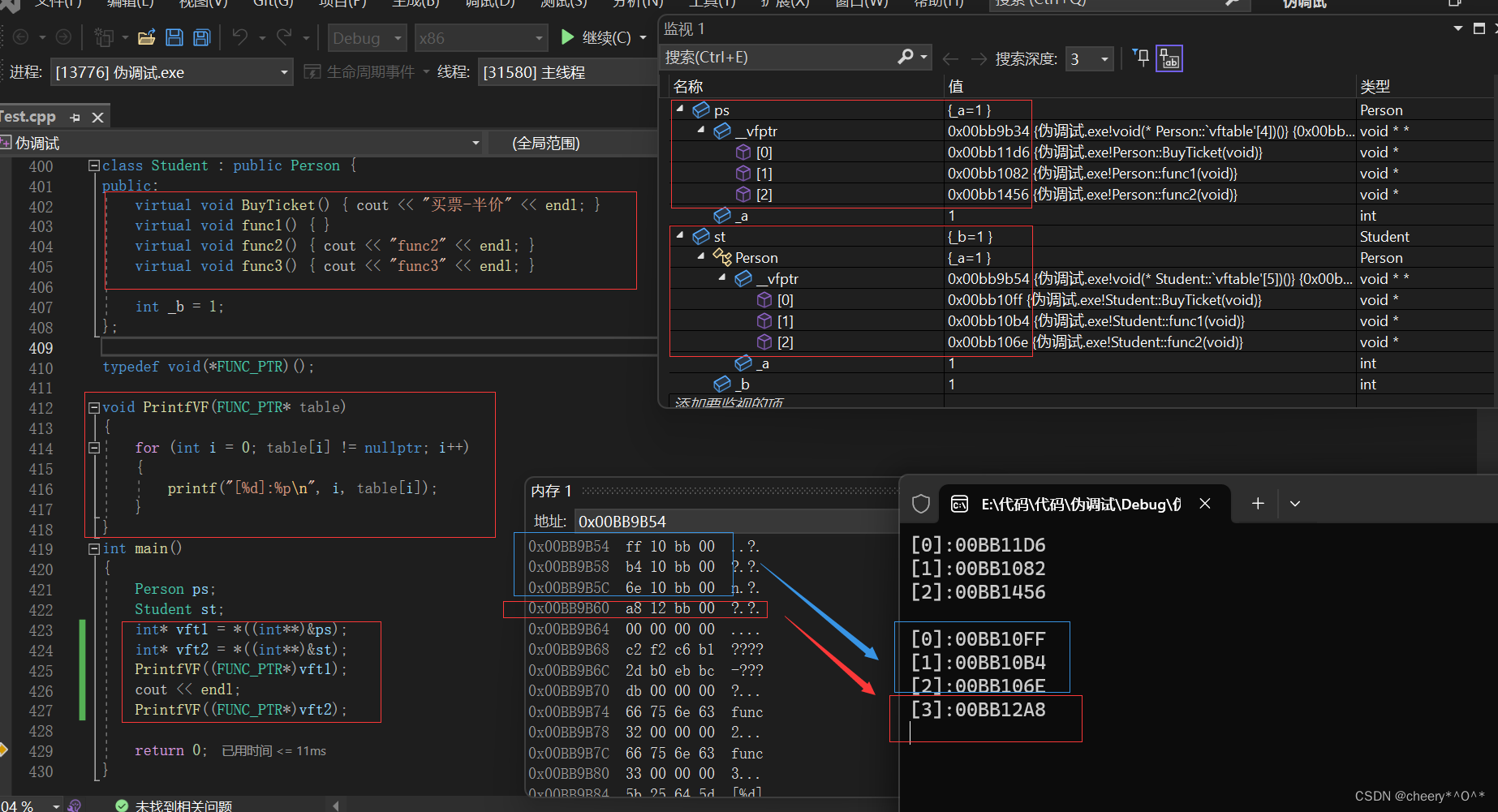 通过验证我们发现结论是正确的。? ? ? ? ?那么虚表存在哪里呢?ok它存在 代码段(常量区)中,这里就不进行验证了,验证方法就是通过创建各种区域(栈、堆、常量区、静态区)的变量,通过将其地址输出打印,对比确定它的实际位置。
通过验证我们发现结论是正确的。? ? ? ? ?那么虚表存在哪里呢?ok它存在 代码段(常量区)中,这里就不进行验证了,验证方法就是通过创建各种区域(栈、堆、常量区、静态区)的变量,通过将其地址输出打印,对比确定它的实际位置。
动态绑定与静态绑定
1. 静态绑定又称为前期绑定 ( 早绑定 ) , 在程序编译期间确定了程序的行为 , 也称为静态多态比如:函数重载2. 动态绑定又称后期绑定 ( 晚绑定 ) ,是在程序运行期间,根据具体拿到的类型确定程序的具体行为,调用具体的函数,也称为动态多态 。比如:前面举过的买票的例子
多继承中的虚函数表
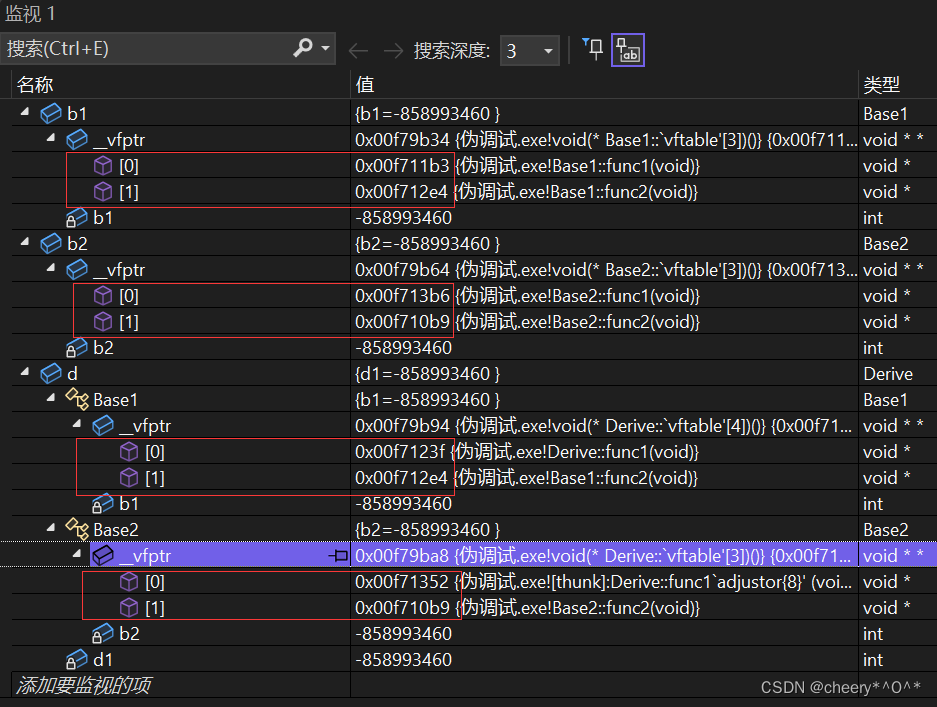
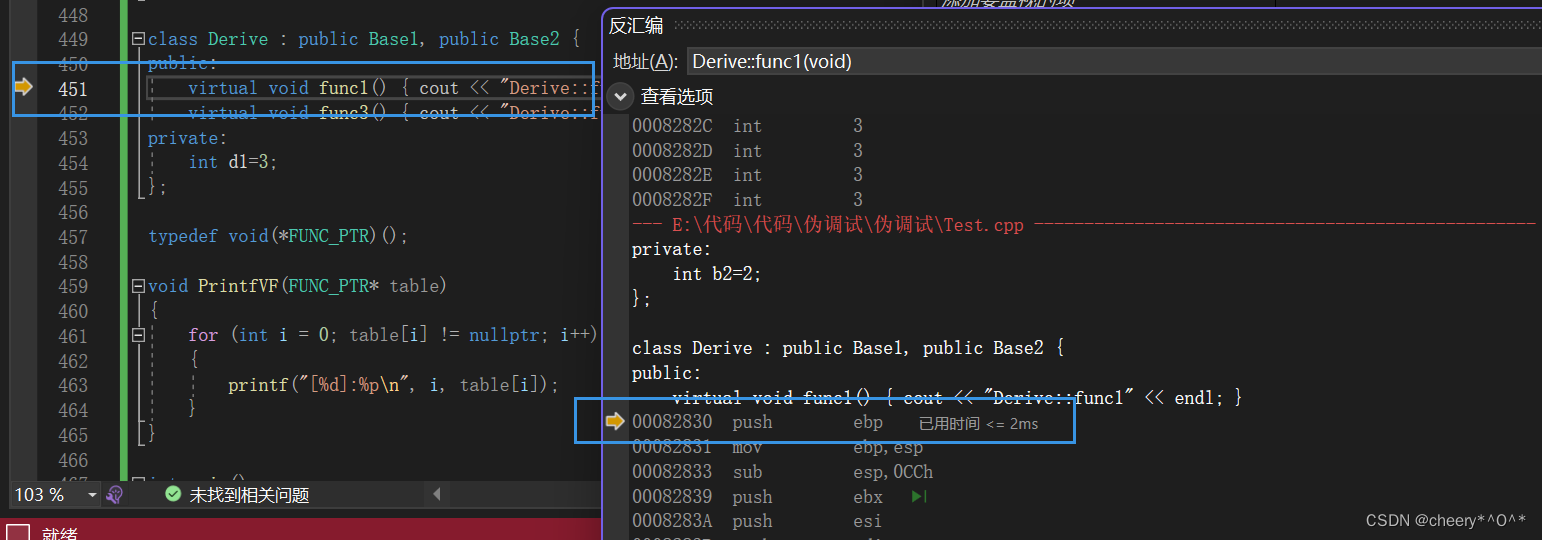
为了观察多继承的虚函数表,我们使用如下代码:class Base1 { public: virtual void func1() { cout << "Base1::func1" << endl; } virtual void func2() { cout << "Base1::func2" << endl; } private: int b1; }; class Base2 { public: virtual void func1() { cout << "Base2::func1" << endl; } virtual void func2() { cout << "Base2::func2" << endl; } private: int b2; }; class Derive : public Base1, public Base2 { public: virtual void func1() { cout << "Derive::func1" << endl; } virtual void func3() { cout << "Derive::func3" << endl; } private: int d1; };
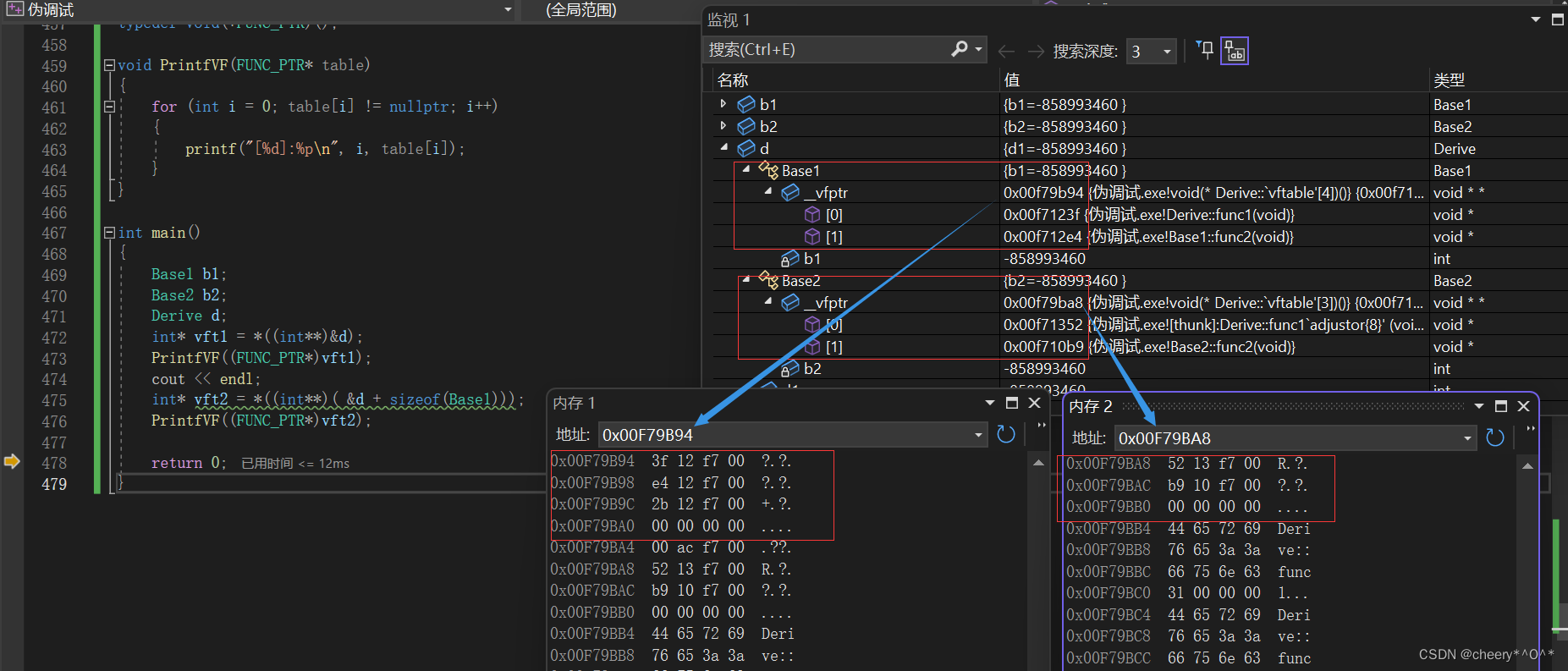
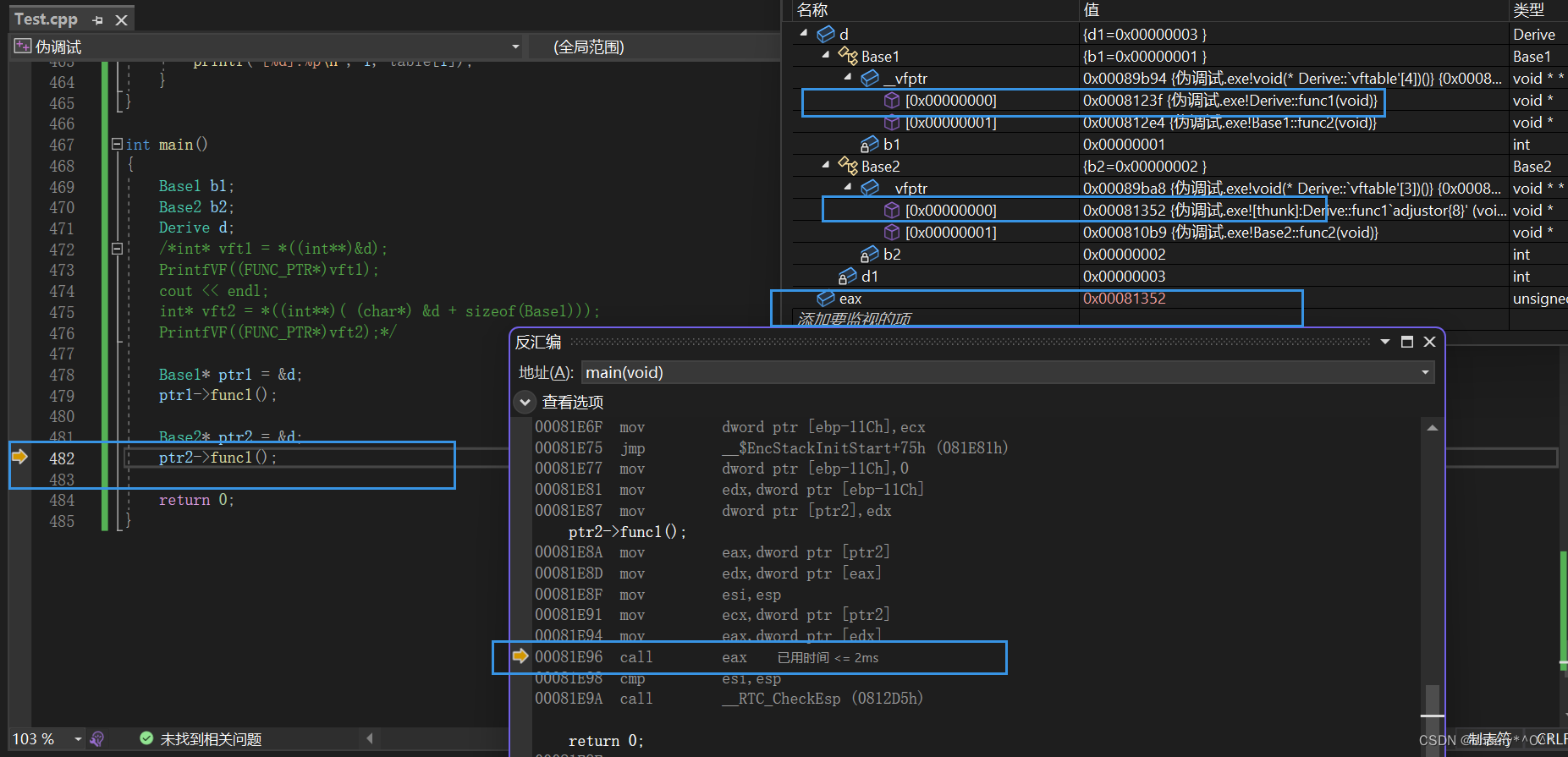
我们通过监视窗口得到Derive对象d中含有两张虚表,一个存Base1对象b1中的虚函数,一个存Base2对象b2中的虚函数,如果重写则进行相应的覆盖。
但是d中的func3会存在哪里呢,根据上面的总结,子类新增的虚函数存在虚表的结尾,那么是存在哪个虚表的结尾呢,我们依然通过上面的方法检验一下
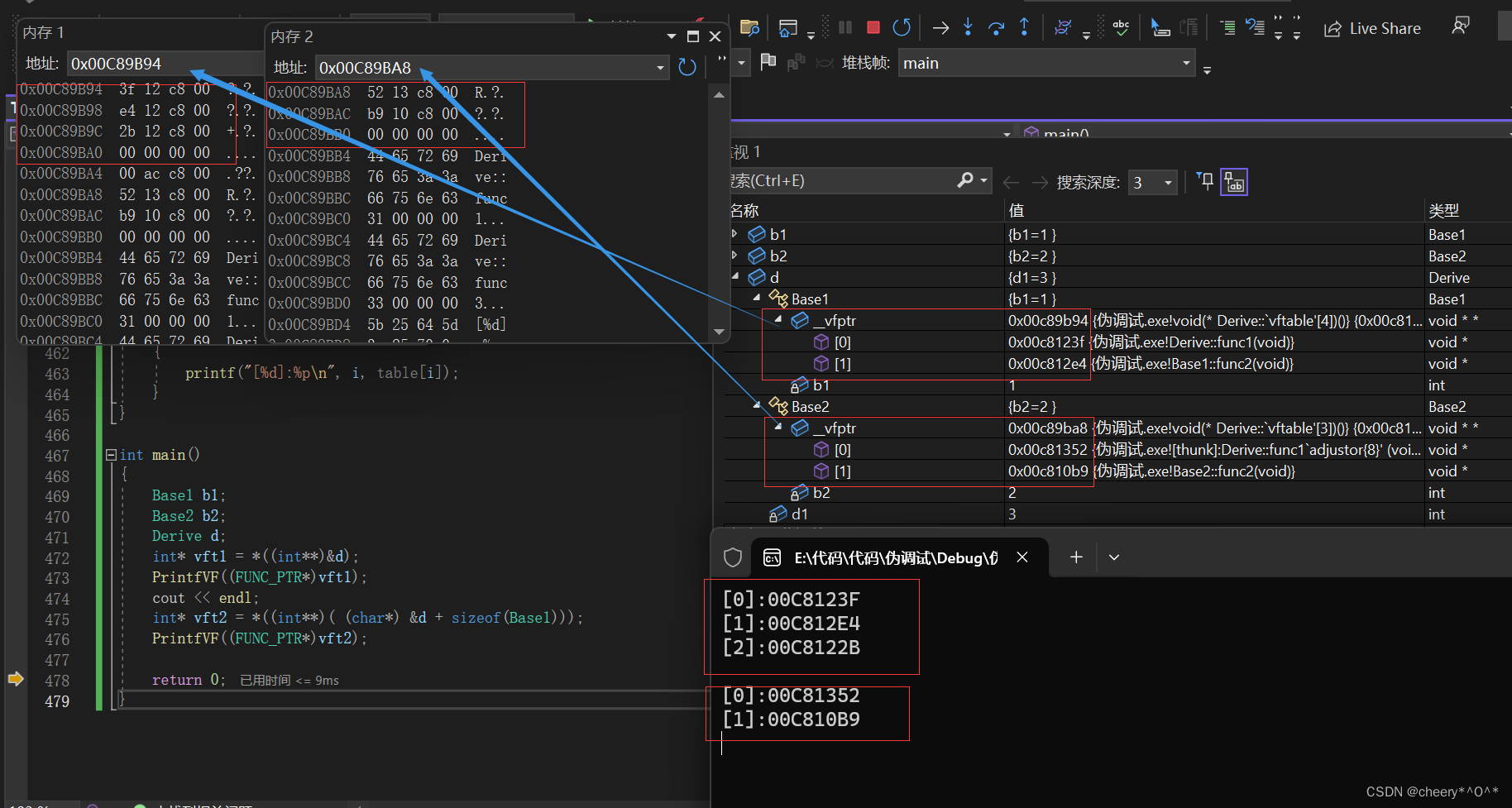
打印出来我们发现func3写在了第一个虚表之后,同时我们还从打印结果发现虚表中调用的func1也就是下标位0的位置的虚函数它显示的地址不同,可是我们重写了func1就意味着应该调到了同一个func1函数,那为什么这里的地址不同呢?
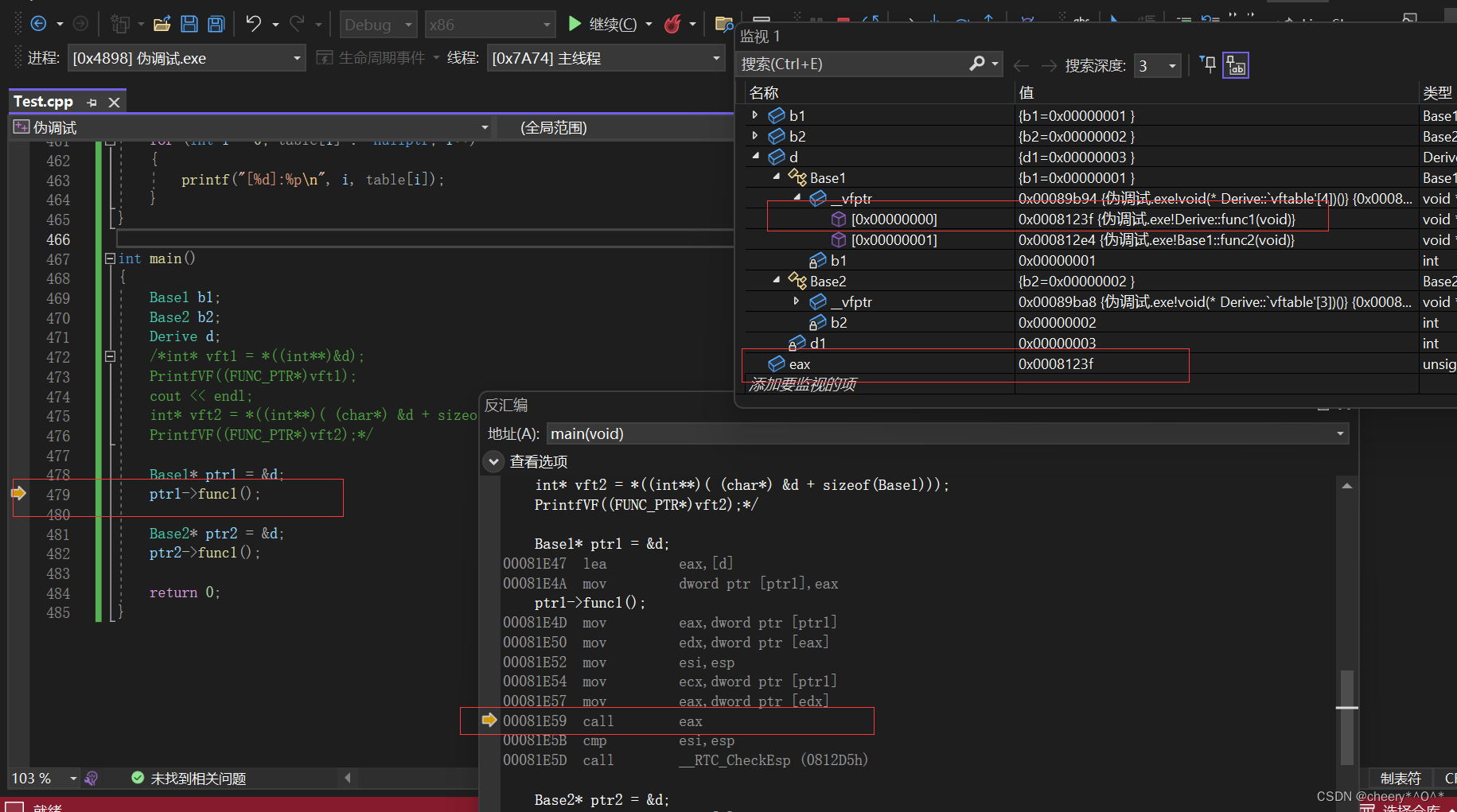
我们利用指针切片得到指向两个虚表的指针,然后用指针直接调用func1函数调用的是同一个函数,我们转到反汇编看一下,首先调用第一个func1,我们发现反汇编中的call马上要执行func1函数,我们将eax寄存器的值添加到监视窗口发现它的值是第一个虚表中的func1的地址,按f11进去发现是一个jmp指令,它要跳转到func1的真实地址,调用func1.
我们继续观察第二个指针
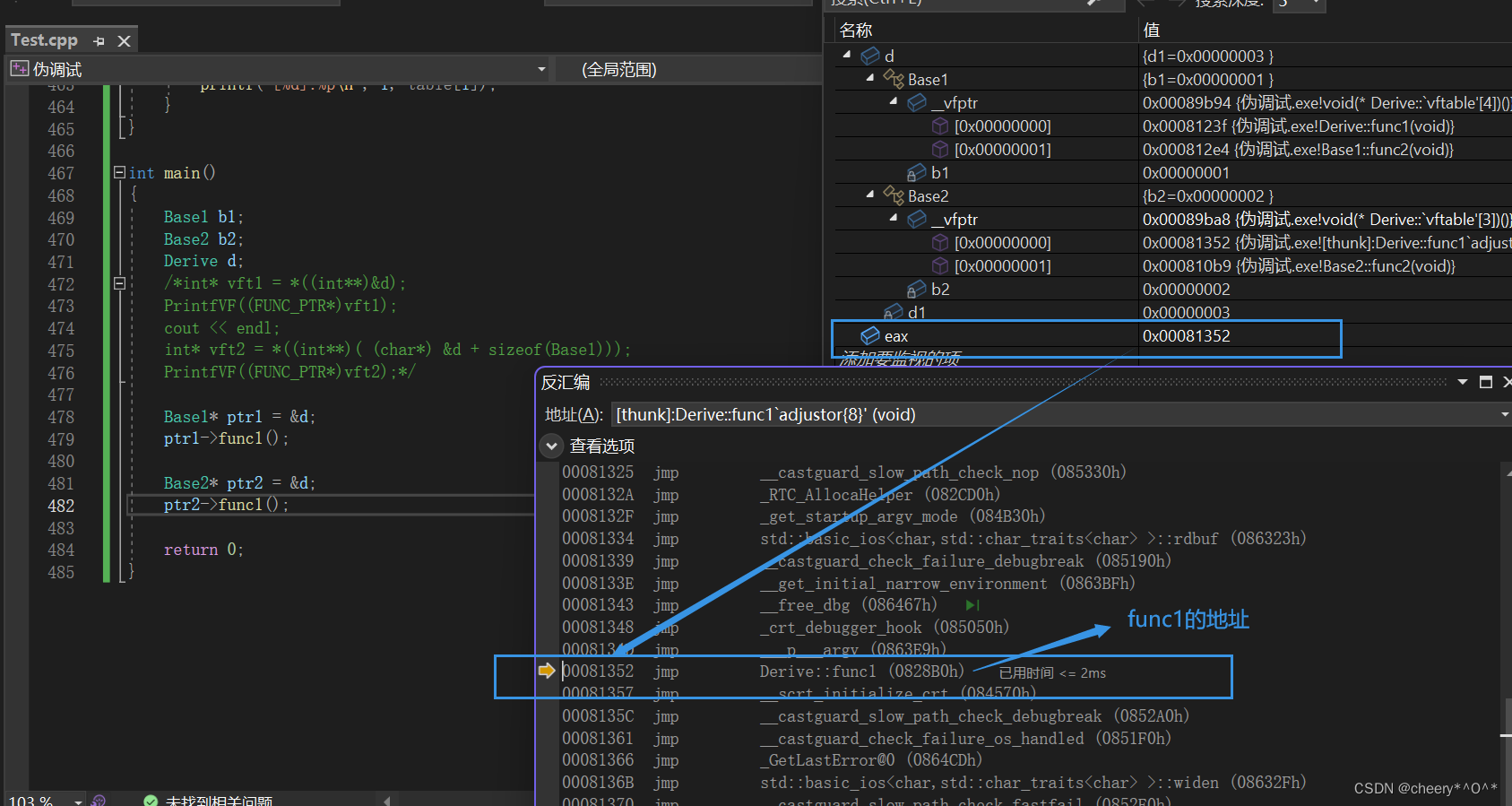
我们发现此时的eax存的地址改成了第二张虚表中的func1的地址,显然这个地址跟第一张虚表的地址不同,我们按f11跳转进去
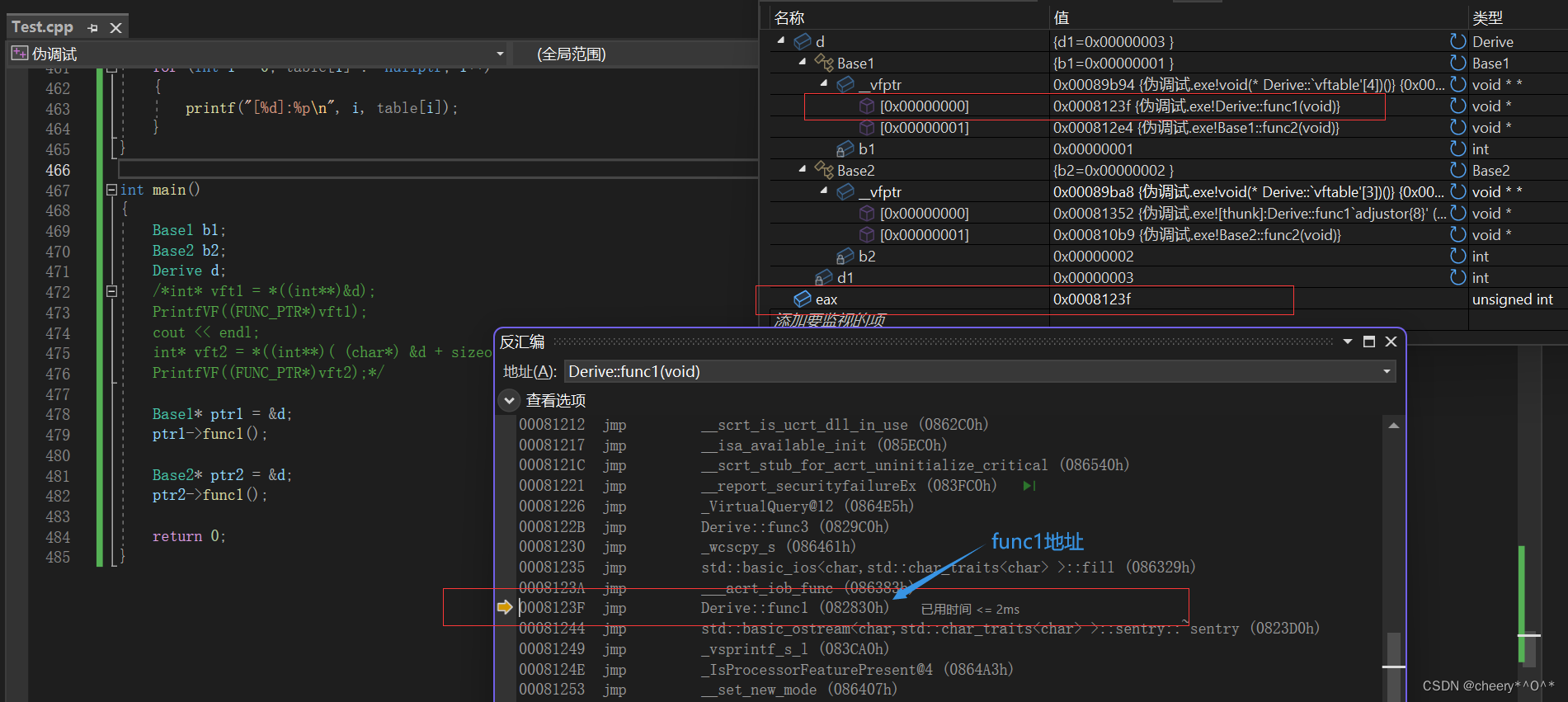
一直跳转,我们又会找到一个func1的地址
而这个地址跟第一张虚表的func1的地址是相同的,继续jmp就跟第一个指针寻找func1的过程相同了。
所以两个指针最终找到的func1函数是同一个!
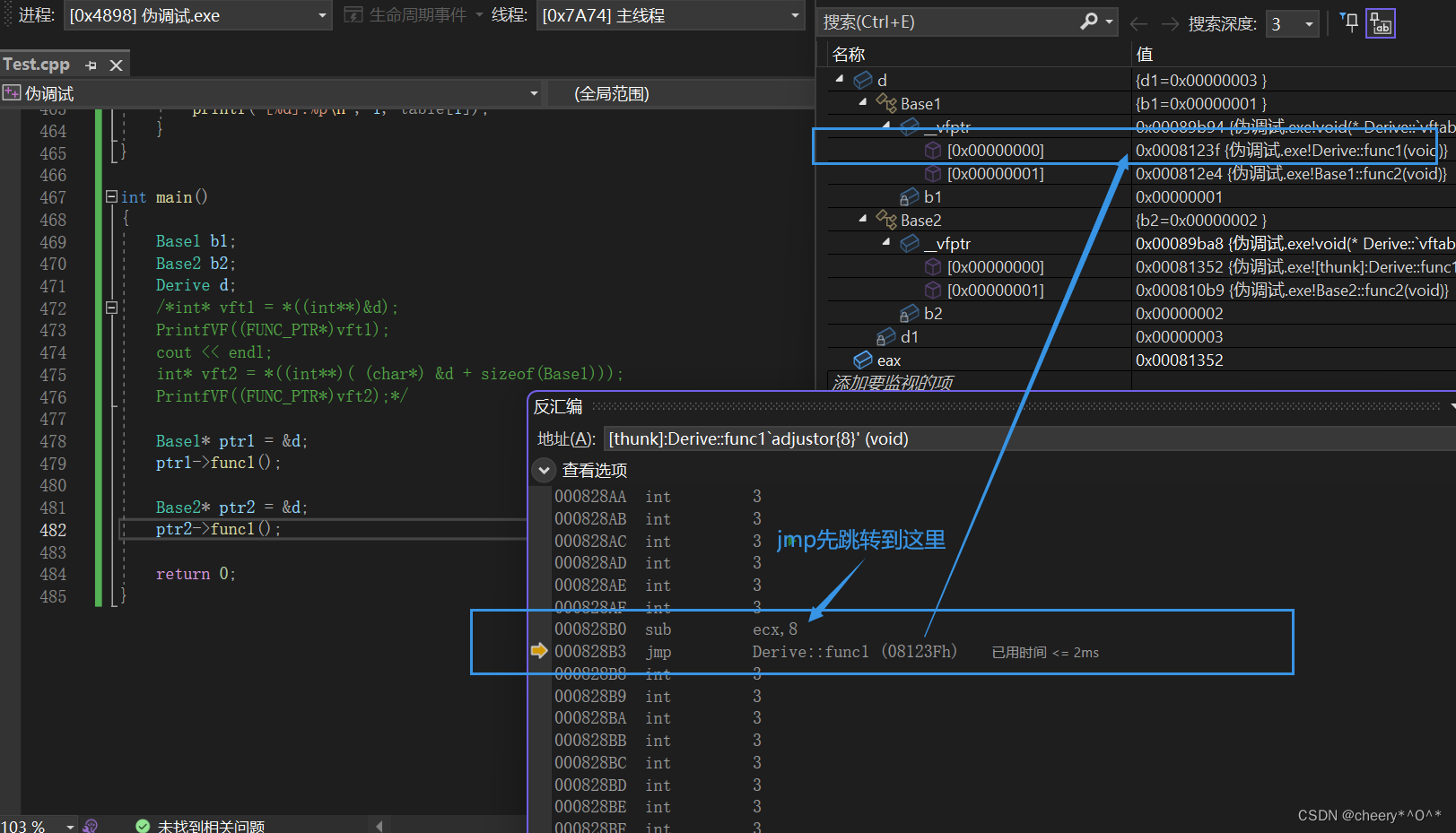
反观整个过程,第二个指针无非多了一个跳转的过程,这个过程执行了一句(sub? ?ecx,8),这个ecx存的是this指针,这条语句意思是让this指针-8,执行这个操作后就跟第一个指针的寻址过程重合了。
仔细观察两个指针的指向位置不难发现,中间差距了一个Base1的大小,Base1中存了一个vfptr指针和一个int变量,因此其大小为8,因此让这里的this指针即第二个指针-8就是为了让这个指针指向第一个指针的位置,然后开始寻找func1的地址。
为什么我们第二个指针要先找到第一个指针指向的位置,再找func1呢?
因为我们要找的func1函数是属于Derive对象的,调用时需要传this指针,通过this指针进行调用,这里的this指针需要传递正确,需要指向对象,第一个指针指向的位置恰好就是Derive对象,因此不需要修改,而第二个指针作为this指针指向是错误的,他并没有指向Derive对象,因此需要先修正,再进行实际调用。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于朴素Bayes分类的强化学习及在游戏中的应用
- java数据结构与算法刷题-----LeetCode345. 反转字符串中的元音字母
- 设计模式-享元模式
- c/c++循环队列(对小白友好)
- Redis多路复用在不同操作系统的性能
- GIT相关4——git命令
- JS进阶-深入对象(二)
- 【ReactJs 中使用 TSX】基本、组件、方法、实现类的类型标注
- 管理者想要带领团队达成目标,不妨从以下7个关键处着手
- 4G网络架构、网元接口、网元功能介绍