目标检测难题 | 小目标检测策略汇总
大家好,在计算机视觉中,检测小目标是最有挑战的问题之一,本文给出了一些有效的策略。

从无人机上看到的小目标
为了提高模型在小目标上的性能,本文推荐以下技术:
-
提高图像采集的分辨率
-
增加模型的输入分辨率
-
tile你的图像
-
通过增强生成更多数据
-
自动学习模型anchors
-
过滤掉无关的类别
小目标问题困扰着世界各地的目标检测模型。查一下最近的模型在COCO上的评估结果,YOLOv3,EfficientDet和YOLOv4:

查看AP_S、AP_M、AP_L以了解最新的模型
以Efficient为例,小目标的AP只有12%,大目标的AP为51%。这几乎是五倍的差异,检测小物体如此困难要归结于模型,目标检测模型通过在卷积层中对像素进行聚合来形成特征。

物体检测中的特征聚合
在网络的末端,基于损失函数进行预测,损失函数根据预测值和ground truth之间的差异对所有像素进行加和。
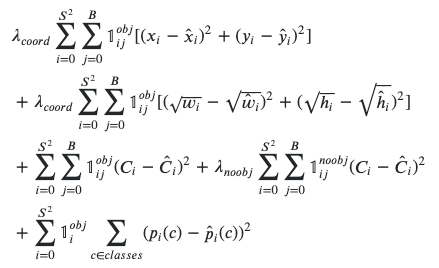
YOLO中的损失函数
如果ground truth框不大,则在进行训练时信号会很小。此外,小物体最有可能有数据标记错误,他们的识别可能被忽略,从经验和理论上讲小物体是很难的。
提升图像采集的分辨率
这其实都是分辨率的问题。
非常小的物体的边界框中可能只包含几个像素,这意味着增加图像的分辨率可以增加探测器可以从那个小盒子中形成的丰富特征,这是非常重要的。
因此,我们建议尽可能提高采集图像的分辨率。
提高模型的输入分辨率
一旦有了更高分辨率的图像,就可以放大模型的输入分辨率。警告:这将导致大型模型需要更长的时间来训练,并且开始部署时,也会更慢地进行推断,可能需要实验来找出速度与性能之间的正确权衡。
在训练YOLOv4中,可以通过改变配置文件中的图像大小来轻松缩放输入分辨率。
[net]?
batch=64?
subdivisions=36?
width={YOUR?RESOLUTION?WIDTH?HERE}?
height={YOUR?RESOLUTION?HEIGHT?HERE}?
channels=3?
momentum=0.949?
decay=0.0005?
angle=0?
saturation?=?1.5?
exposure?=?1.5?
hue?=?.1??
learning_rate=0.001?
burn_in=1000?
max_batches=6000?
policy=steps?
steps=4800.0,5400.0?
scales=.1,.1
同时也可以在训练YOLOv5中通过改变训练命令中的图像尺寸参数来轻松缩放输入分辨率:
!python?train.py?--img?{YOUR?RESOLUTON?SIZE?HERE}?--batch?16?--epochs?10?--data?'../data.yaml'?--cfg?./models/custom_yolov5s.yaml?--weights?''?--name?yolov5s_results??--cache
对图像进行Tiling
检测小物体的另一个重要策略是将图像切割后形成batch,这个操作叫做tile,作为预处理步骤。tile可以有效地将检测器聚焦在小物体上,但允许保持所需的小输入分辨率,以便能够运行快速推断。
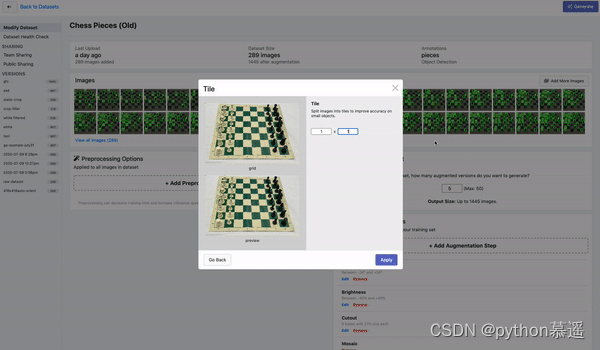
tile图像作为预处理步骤
如果在训练中使用tile,重要的是要记住,也需要在推理时tile你的图像。
通过增强生成更多数据
数据增强从基本数据集生成新的图像,这对于防止模型过拟合训练集非常有用。
一些特别有用的小物体检测增强包括随机裁剪、随机旋转和马赛克增强。
自动学习模型Anchors
Anchors是模型学会预测的与之相关的原型边界框。也就是说,anchors可以预先设置,有时对你的训练数据不是最优的。最好根据手头的任务自定义调优它们,YOLOv5模型会根据自定义数据自动为你完成这项工作,所需要做的就是开始训练。
Analyzing?anchors...?anchors/target?=?4.66,?Best?Possible?Recall?(BPR)?=?0.9675.?Attempting?to?generate?improved?anchors,?please?wait...?WARNING:?Extremely?small?objects?found.?35?of?1664?labels?are?<?3?pixels?in?width?or?height.?Running?kmeans?for?9?anchors?on?1664?points...?thr=0.25:?0.9477?best?possible?recall,?4.95?anchors?past?thr?n=9,?img_size=416,?metric_all=0.317/0.665-mean/best,?past_thr=0.465-mean:?18,24,??65,37,??35,68,??46,135,??152,54,??99,109,??66,218,??220,128,??169,228?Evolving?anchors?with?Genetic?Algorithm:?fitness?=?0.6825:?100%|██████████|?1000/1000?[00:00<00:00,?1081.71it/s]?thr=0.25:?0.9627?best?possible?recall,?5.32?anchors?past?thr?n=9,?img_size=416,?metric_all=0.338/0.688-mean/best,?past_thr=0.476-mean:?13,20,??41,32,??26,55,??46,72,??122,57,??86,102,??58,152,??161,120,??165,204
过滤掉无关的类别
类别管理是提高数据集质量的一项重要技术。如果有一个类与另一个类明显重叠,应该从数据集中过滤掉这个类。也许在处理中,认为数据集中的小物体不值得检测,可能希望将其拿掉。
综上所述,正确地检测小物体确实是一项挑战。本文讨论了一些策略来改善小物体探测器,即:
-
提高图像采集的分辨率
-
增加模型的输入分辨率
-
tile你的图像
-
通过增强生成更多数据
-
自动学习模型anchors
-
过滤掉无关的类别
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 70内网安全-域横向内网漫游Socks代理隧道技术(下)
- 3年Java想转网络安全,该怎么走?
- 2023.12.18 JAVA学习day03,while与for循环
- IPv4 VS IPv6代理全解,跨境电商代理IP选哪种?
- 关于MySql字段类型的实践总结
- Vue3 知识点总结
- HTML中的6种空格标记
- 关于Android副屏的一些体验
- <Articles v-if=“!loading“ :articles=“props.articles“ />的区分
- 网络安全常见漏洞类型总结