从零入门激光SLAM(十二)——evo工具箱
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激光SLAM,也方便想入门SLAM的同学和小白学习参考,相信看完会有一定的收获。如有不对的地方欢迎指出,欢迎各位大佬交流讨论,一起进步。博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。
SLAM和里程计评估工具——evo - 灰信网(软件开发博客聚合)?
evo详细参考见上述链接
一、简介
EVO代表"Evaluating Visual Odometry and SLAM systems",是一组用于比较和评估视觉里程计(Visual Odometry,VO)和SLAM(Simultaneous Localization and Mapping)系统的工具和方法。EVO工具箱提供了一种用于评估VO和SLAM算法输出轨迹与真实轨迹之间差异的方式。它可以从ROS数据包、KITTI数据集或者Euroc数据集等输入中读取数据,然后计算和显示VO和SLAM轨迹的误差、相对运动信息、以及其他性能指标。
二、安装使用
-
安装?
pip install evo --upgrade --no-binary evo
evo包括两个带尺度的评估工具和四个简单的工具:
Metrics工具
evo_ape:绝对位姿评估工具;evo_rpe:相对位姿评估工具;
简单工具
evo_traj:轨迹可视化工具evo_res:结果评估工具evo_fig:绘图查看工具evo_config:evo配置工具
-
?evo_traj
主要用途是显示轨迹
显示一个轨迹
evo_traj tum a.txt -p显示多个轨迹
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p -vas --plot_mode=xz--ref=[ground_truth]:该选项明确了轨迹可视化中所需使用的标称轨迹文件,使用该选项后,evo会以灰色虚线绘制标称轨迹;
-p 画图像
--plot_mode=xz 画二维图像,也可以xy、yz自己选择
--align_origin 匹配到统一起点
| –align/-a | 采用SE(3) Umeyama对齐,只处理平移和旋转 |
| –align --correct_scale/-as | 采用Sim(3) Umeyama对齐,同时处理平移旋转和尺度 |
| –correct_scale/-s | 仅对齐尺度 |
--save_plot ./output.pdf? 保存图片为PDF
-- full_check可以对轨迹进行检查
轨迹对比
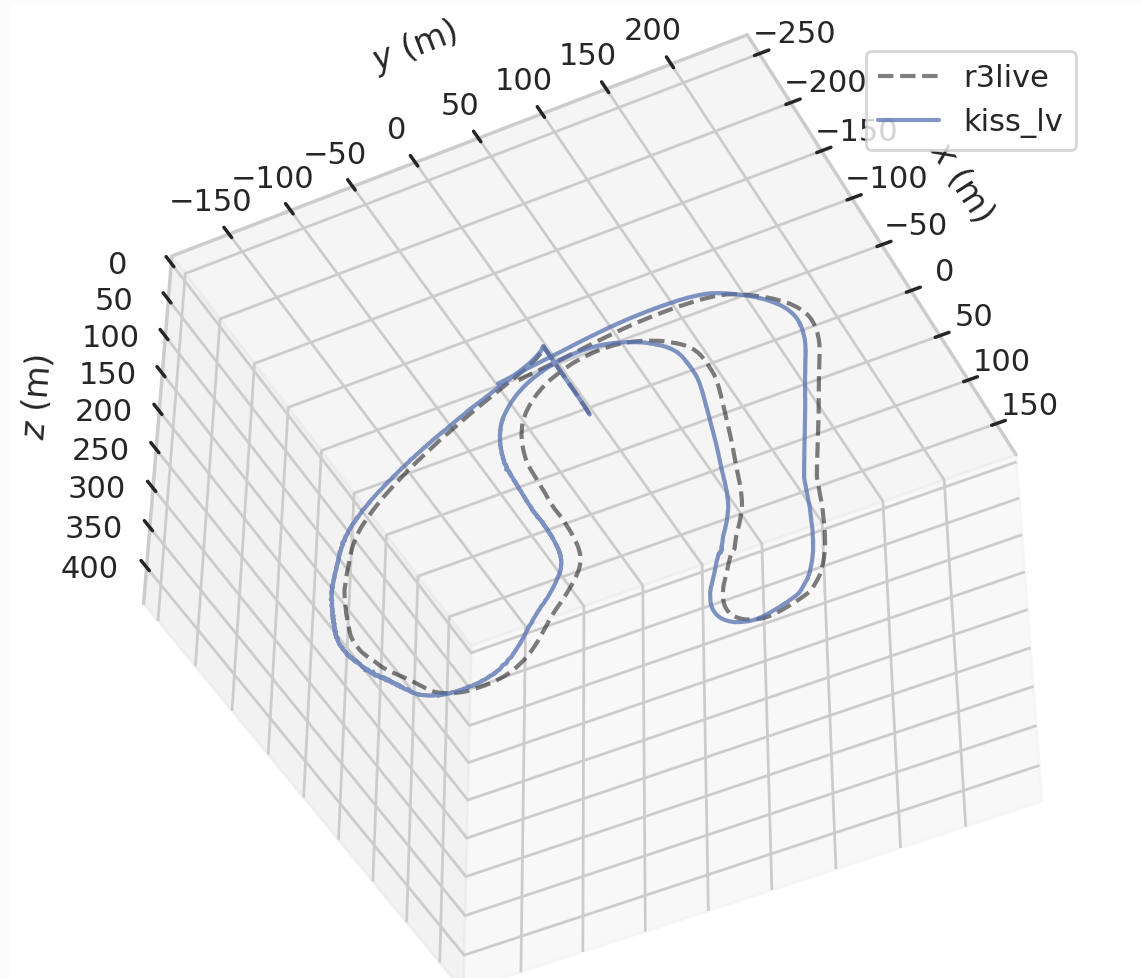
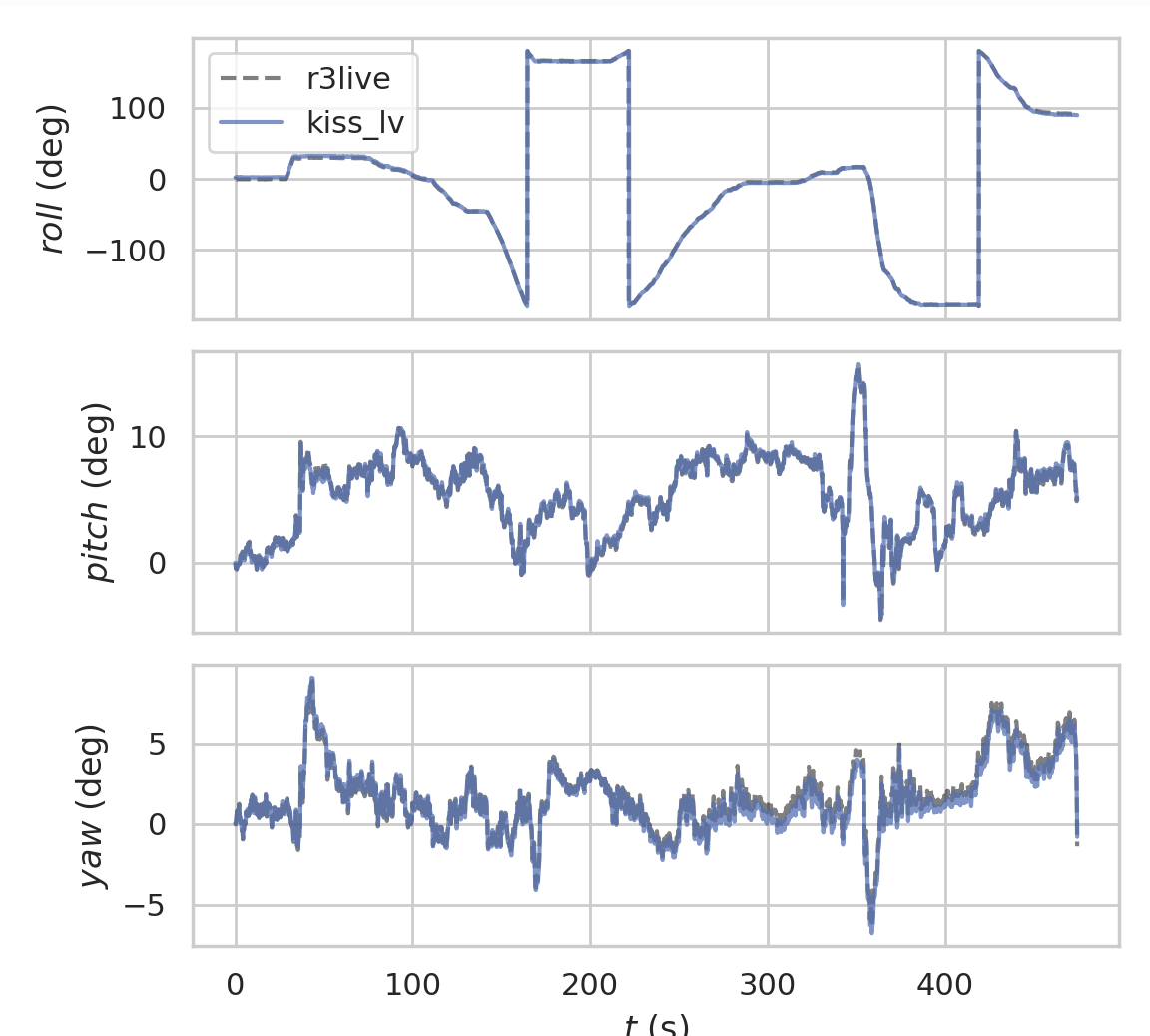
三轴位置对比

三轴姿态角对比?
-
evo_ape/rpe
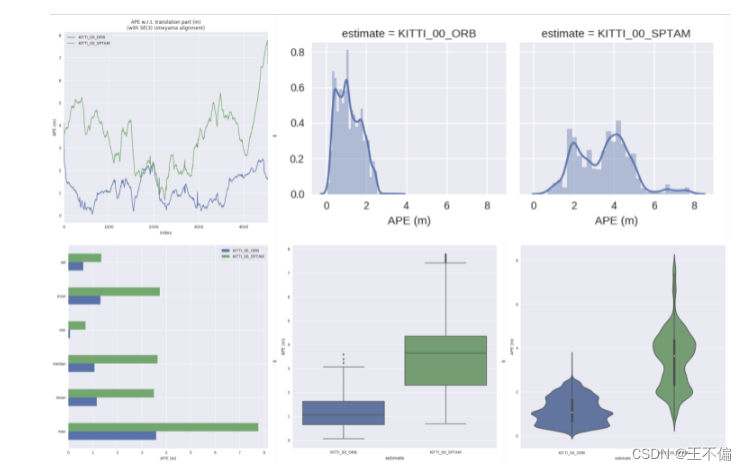
evo_ape kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt -r full -p -vas --plot_mode=xz --save_results --delta 100
evo_rpe kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt -r full -p -vas --plot_mode=xz --save_results --delta 100ape是绝对误差,rpe是相对误差,默认第一个文件是ground truth
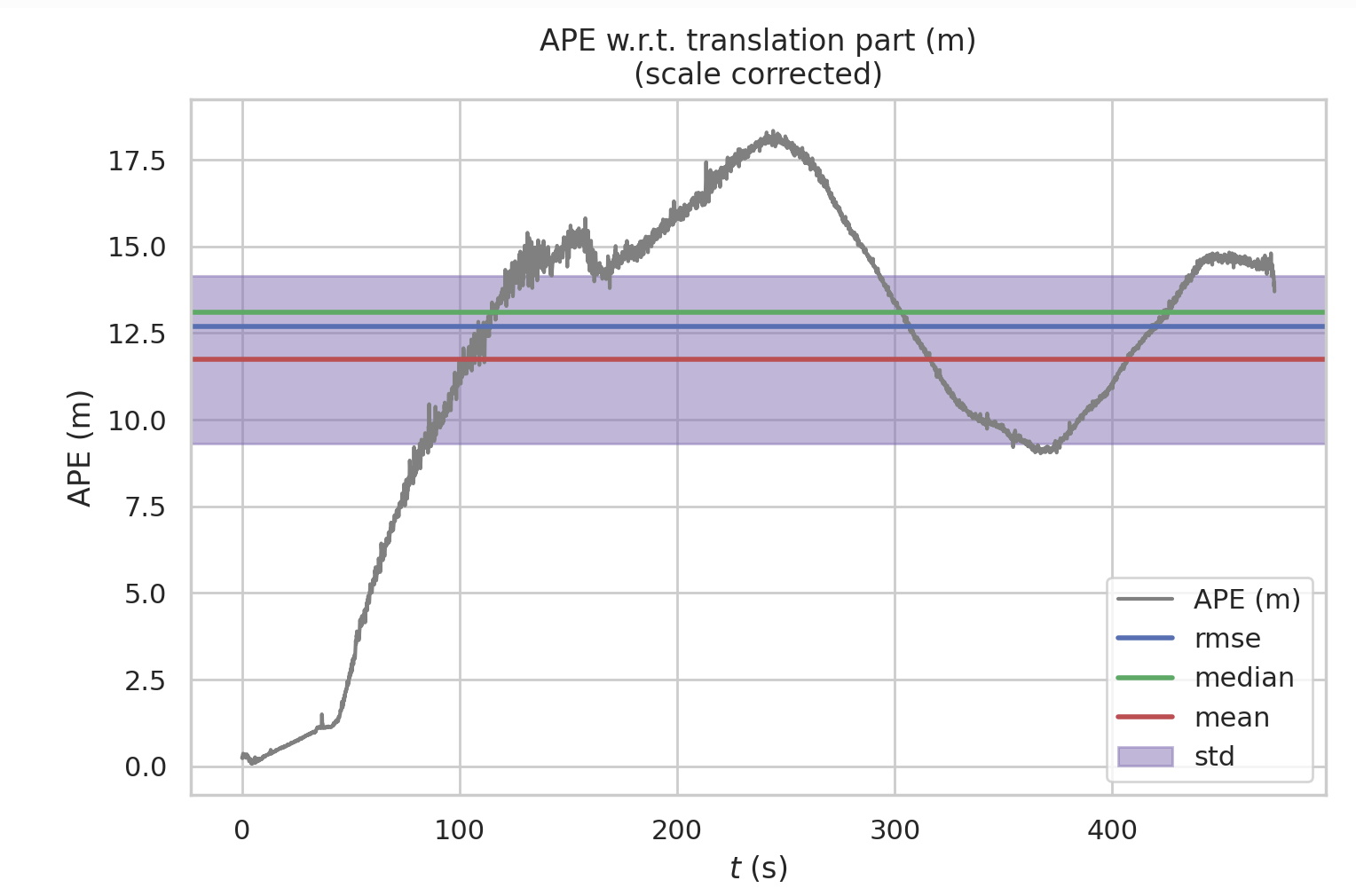
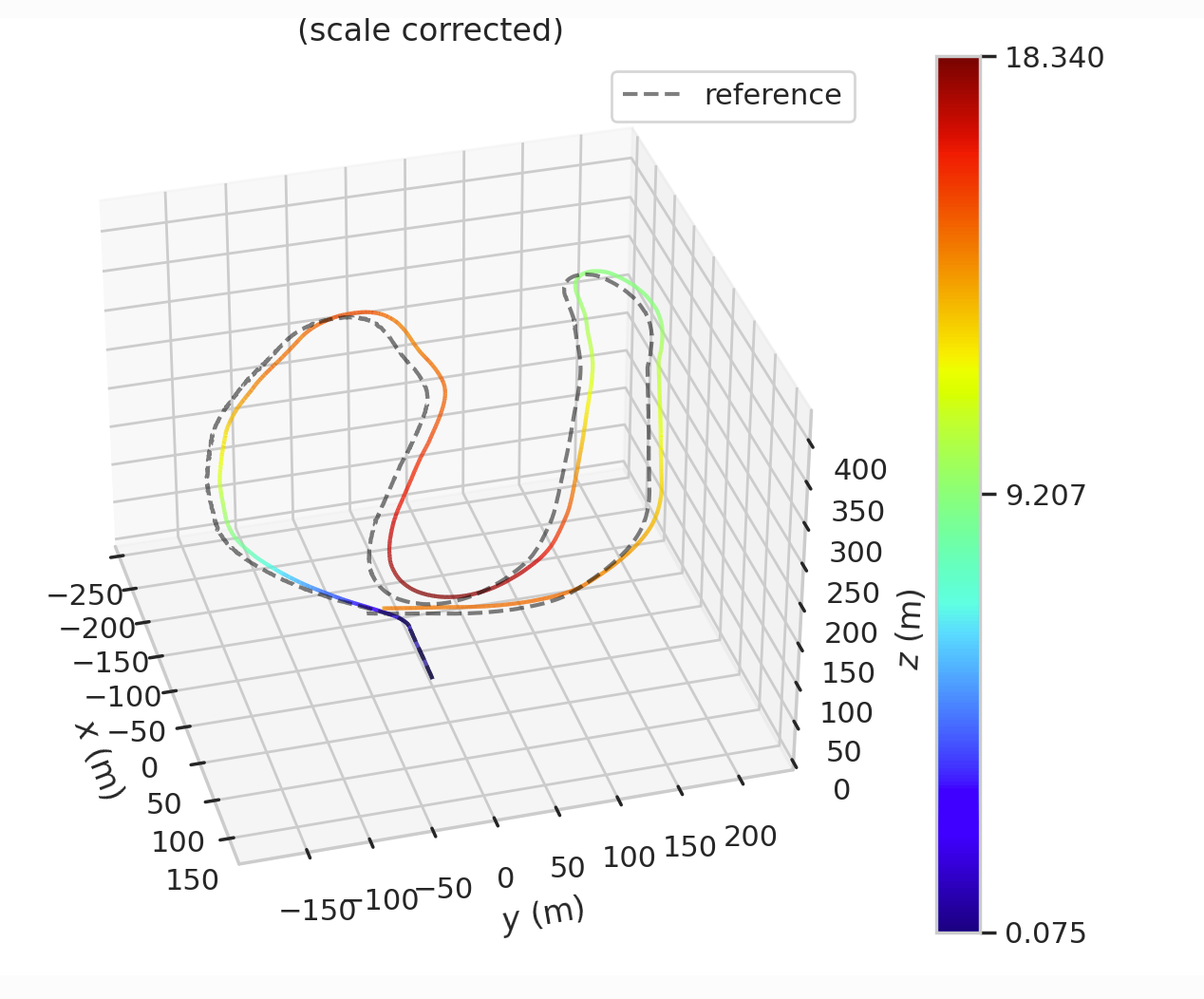
该工具会显示如下所示的轨迹误差曲线和误差热力图。
--save_results,该参数允许我们将evo_ape的结果存储在一个zip文件中,后后续的evo_res评估使用。
-r 表示ape/rpe所基于的姿态关系
--delta 100 表示100m统计一次

-
?evo_res
对比多个方法与真值的精度
evo_res results/*.zip -p --save_table results/table.csv
-
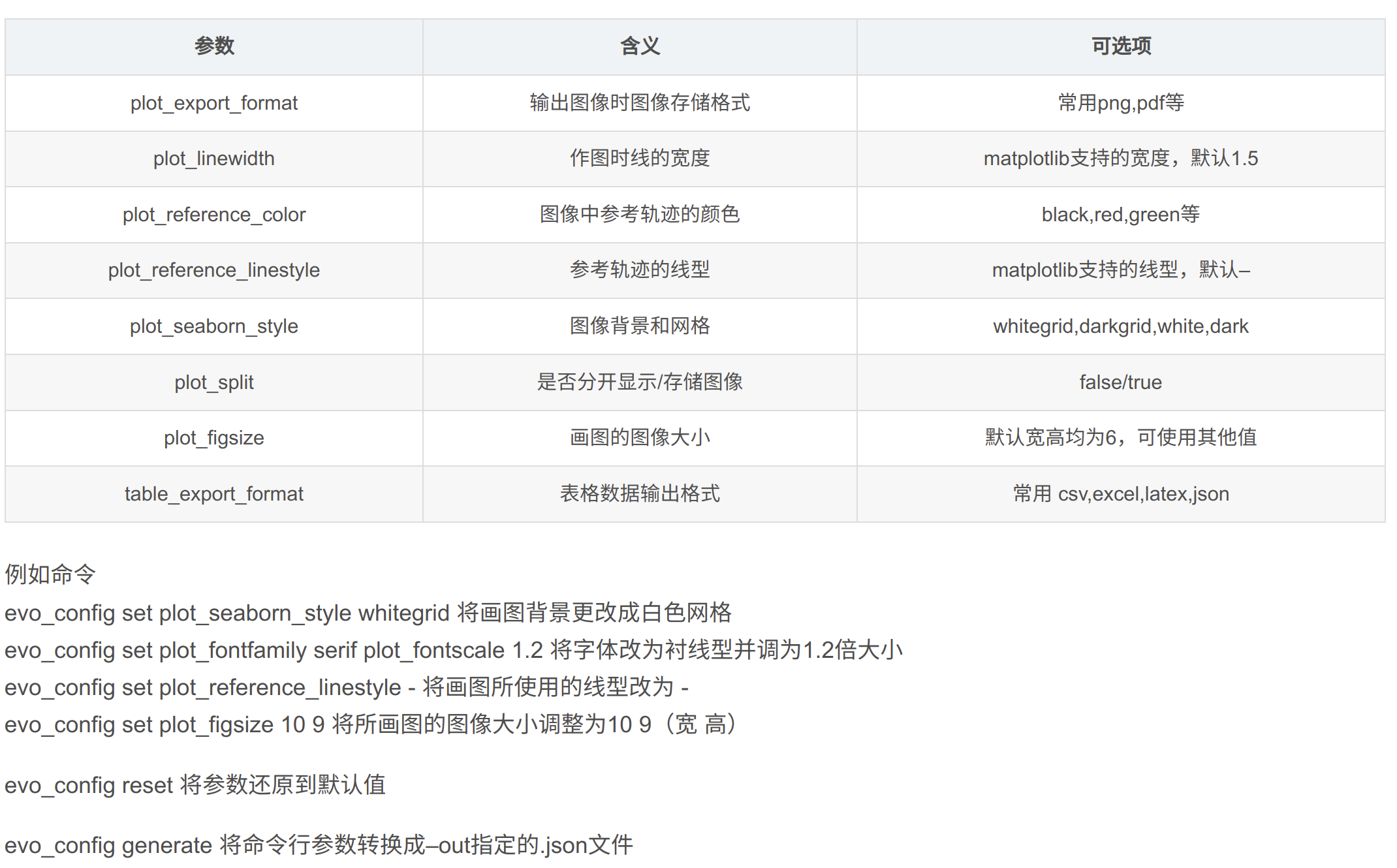
evo_config
evo_config用于保存配置文件,可以把自己的参数保存下来,这样就可以避免每次都输入相同的参数。?
1、生成配置文件
evo_config generate --pose_relation angle_deg --delta 1 --delta_unit m --verbose --plot --out rpe_config.json
生成json配置文件如下所示
{
"delta": 1.0,
"delta_unit": "m",
"plot": true,
"pose_relation": "angle_deg",
"verbose": true
}2、调用生成的配置文件?
evo_rpe groundtruth.txt estimate2.txt -c rpe_config.json?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 二维码地址门牌系统物业采集端:打造智能化、便捷化的住户登记体验
- 会声会影2023如何实现自定义尺寸MP4格式视频制作 会声会影视频制作过程 会声会影免费吗
- 跨境电商营销工具定制功能大揭秘!
- JSON & Ajax
- LLaVA和LLaVA-Plus视觉指令微调及工具使用构建多模态智能体
- ATFX汇市:年末行情远超预期,美元指数竟失守101关口
- 6款AI商品海报创作神器,让设计创意无限!
- 编译原理2.3习题 语法制导分析[C++]
- SpringMVC 写个 HelloWorld
- Hbas简介:数据模型和概念、物理视图