AGV用120°激光扫描避障雷达传感器DE系列功能与通道切换操作说明
AGV用120°激光扫描避障雷达传感器DE系列,包含DE-4211、DE-4611、DE-4311、DE-4511等型号,可帮助AGV/AMR/机器人快速精准地检测障碍物,确保系统运行安全,帮助智能停车系统完成准确的数据判定,实现车位或充电桩占用检测等应用。
本文重点介绍AGV用120°激光扫描避障雷达传感器DE系列功能与通道切换操作说明。

1、DE系列激光避障雷达工作检测原理
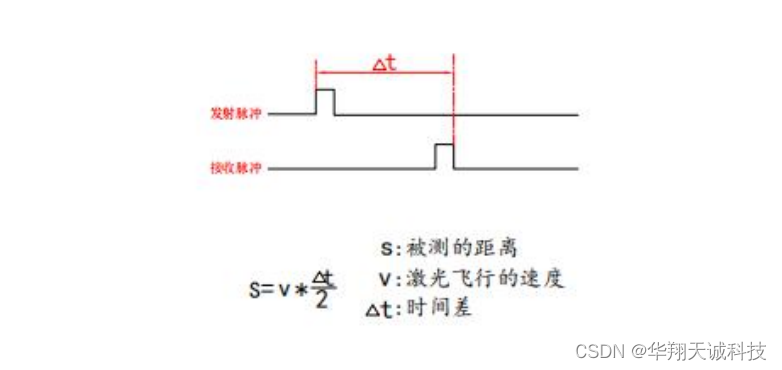
激光扫描传感器是根据激光飞行时间(TOF)测量原理运行的,在极高的同步时钟下,以均匀的时间间隔发 射激光,激光光束遇到物体时会反射回来,激光扫描传感器接收到反射的光束后,通过发射和接收的时间 差Δt 来计算从激光扫描传感器到障碍物的距离。
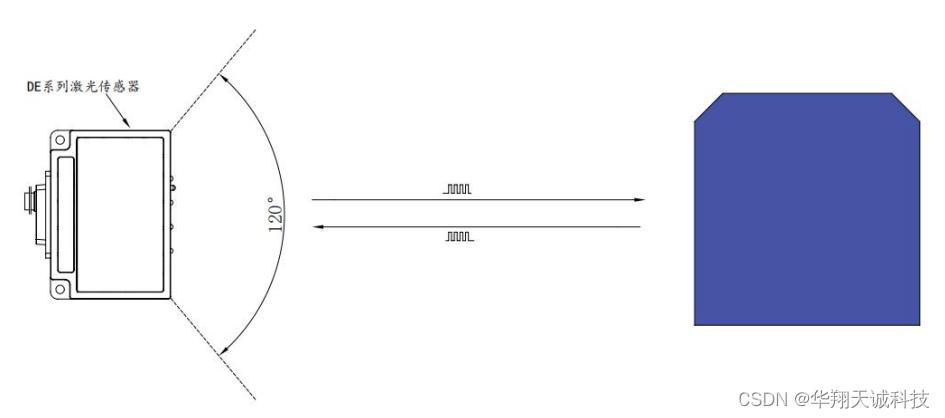
利用激光光束对周围进行二维扫描,获得环境轮廓图形,通过软件配置建立保护区域范围,一旦有物体处 于设定的区域内,传感器对应的输出端口输出信号,上位机获取信号后做出进一步的判断和处理。

2、DE系列激光避障雷达通道切换
DE-42xxx/DE-46xxx 最多可以设置 16 个检测通道,通过开关量输入切换通道来满足不同场合下的检测需求。 当 AGV 运行到线路 A 位置时候,使用通道 1 设置的感应范围检测; 当 AGV 运行到线路 B 位置时候,由于外部空间变换原来的通道 1 感应范围 AGV 无法通过,则切换到感应范 围设置较小一些的通道 2 就可以顺利通过。 如下图 AGV 使用过程应用所示:


DE-42xxx/DE-46xxx 在接收到通道切换信号后,由于扫描周期影响存在切换延时,通道切换并不会立刻生效, 切换延时如下图所示
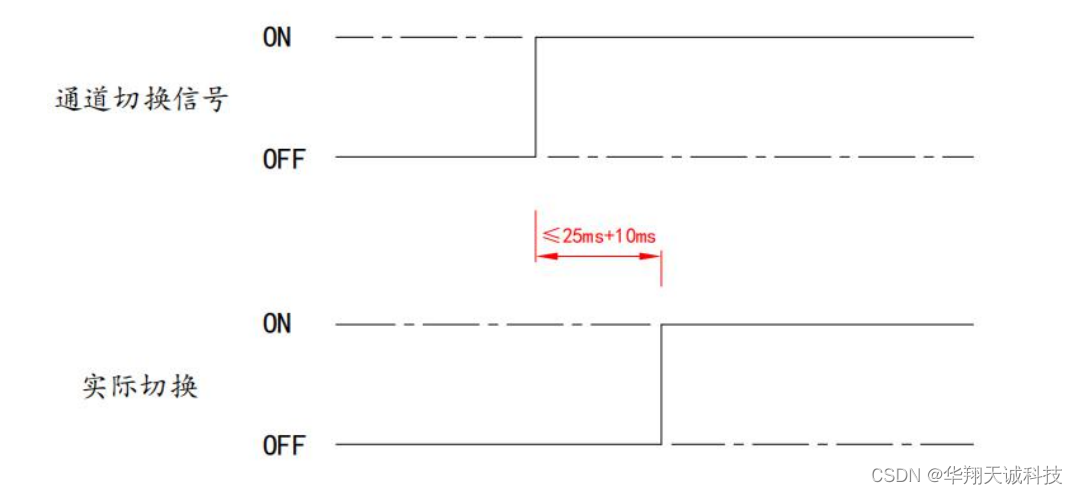
DE-42xxx/DE-46xxx 采集完整的 120°-240°数据的时间为 25ms,DE-42xxx/DE-46xxx 收到通道切换信号后从 内存中获取通道的检测图形并解析这个过程耗时不超过 10ms,因此从 DE-42xxx/DE-46xxx 收到通道切换信号 到通道切换成功整个过程耗时≤35ms。
注意:在切换到无图形通道时,传感器将保持之前有图形通道状态输出; 在本次扫描周期(扫描周期为 25ms)内切换通道,输出端口将保持切换通道前的状态;
3、DE系列激光避障雷达检测范围
3.1、检测角度水平角度

3.2、检测垂直角度

3.3、10%和 90%反射率物体检测范围
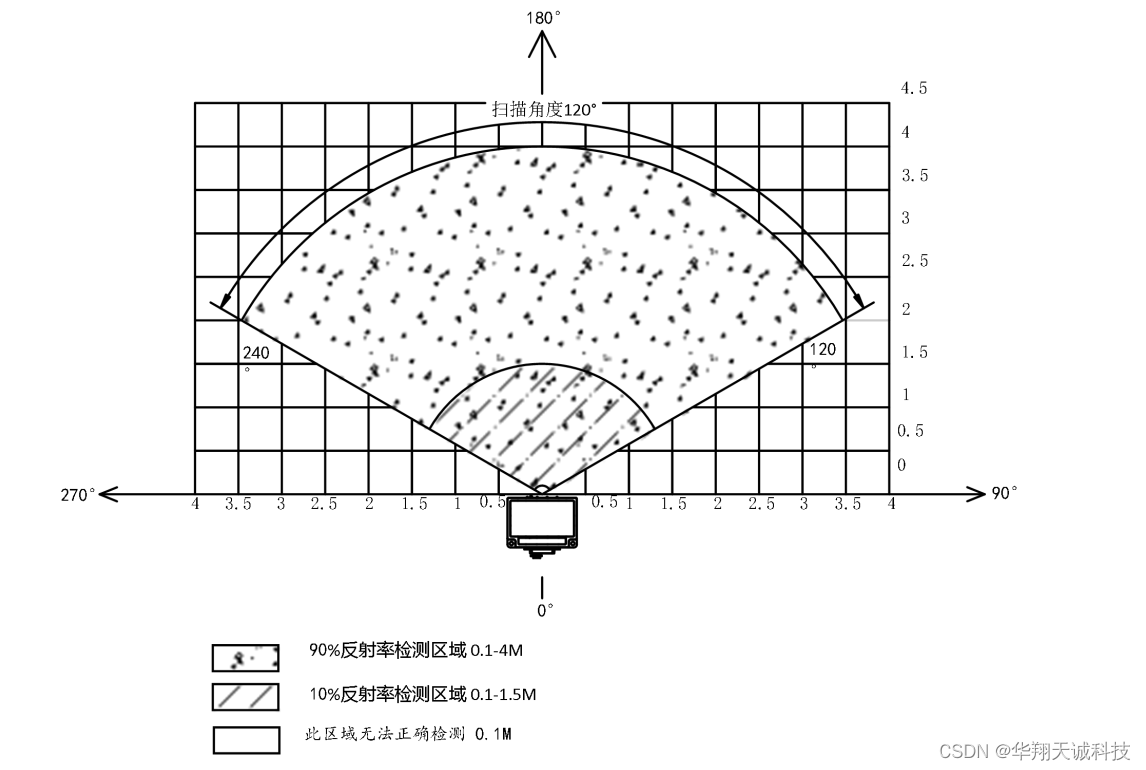
0-10cm 范围内无法正确的识别。
3.4、检测区域设置
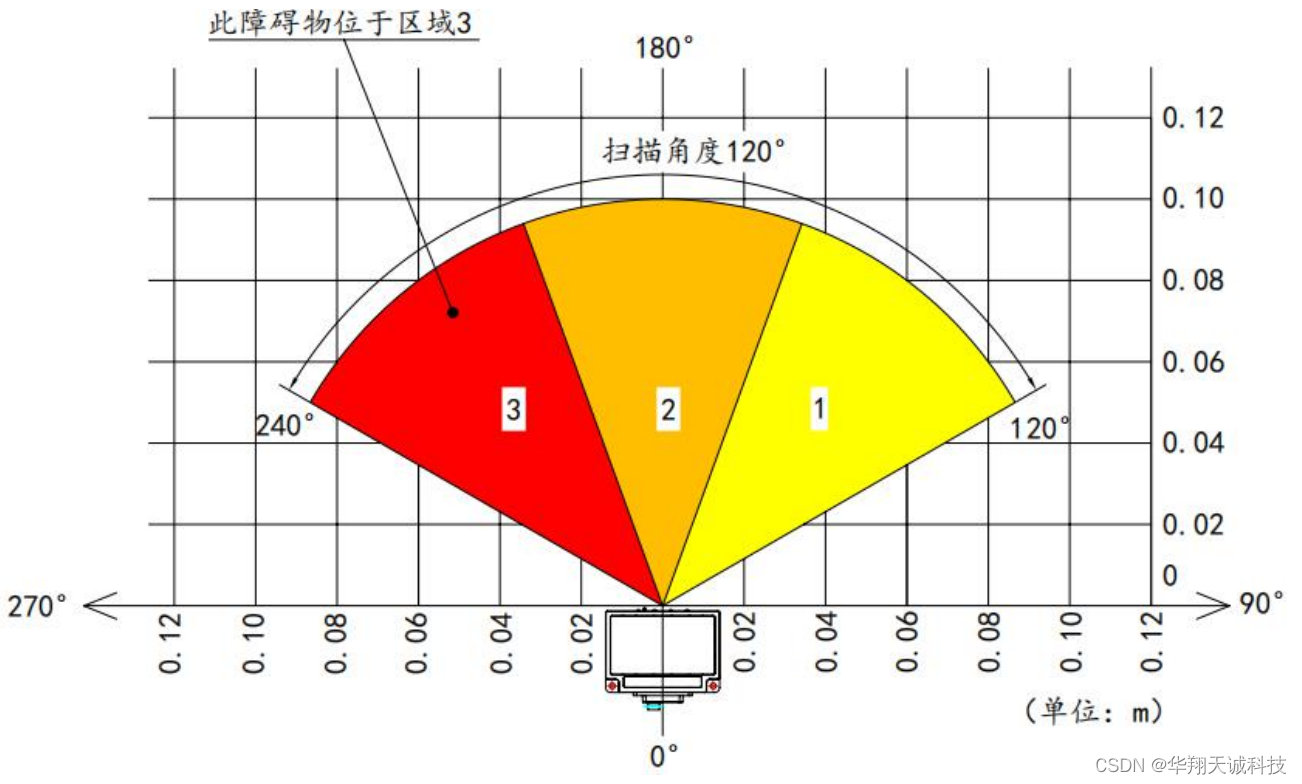
特别说明:在角度为 120°、半径为 10cm 的范围内设置输出 1(警告 2 区)、输出 2(警告 1 区)、输出 3(保护区),那么障碍物无论在那个区输出 1、输出 2、输出 3 均有信号输出
3.5、可检测最小物体直径大小
DE-42xxx/DE-46xxx 中有一个旋转镜,激光光束会随着旋转镜不停发射激光,从而可以扫描一个最大角度为 120°的扇形区域,发射出的激光光束会覆盖一个扇形面,从而可在最大 120°的区域内检测物体。 DE-42xxx/DE-46xxx 的角度分辨率是 0.5。

例如:当 L 为 1000mm 时,激光角度分辨率设置为 0.5°时,此时能检测物体最小分辨率为 8.72mm。(4 舍 5 入取小数点后 2 位)
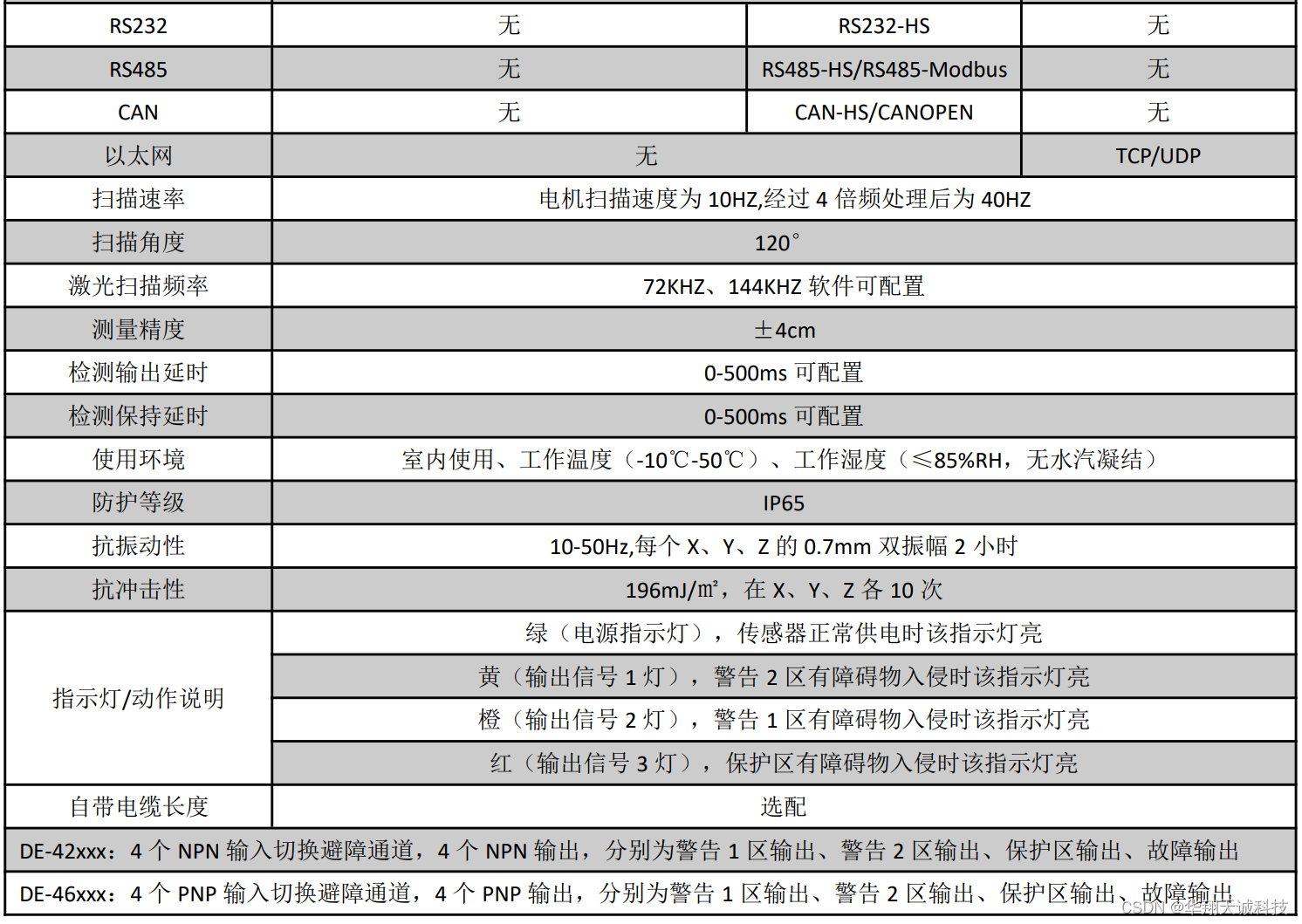
4、DE系列激光避障雷达性能及参数列表


更多关于AGV用120°激光扫描避障雷达传感器DE系列功能与通道切换操作说明,华翔天诚科技欢迎您的咨询与交流!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Python 使用input函数从键盘输入数据
- Jenkins 构建环境指南
- 【微机原理与接口技术】期末模拟卷(2)
- JavaScript中的数组Array(对象)
- 深度学习环境配置超详细教程【Anaconda+Pycharm+PyTorch(GPU版)+CUDA+cuDNN】
- OpenHarmony自定义Launcher
- 流量分析-FTPServer20221010.img-(环境解析)
- 网络配置及概念
- 虚幻UE 材质-顶点/网格体绘制、Megascans材质混合
- 推动行业未来的八个数字化转型趋势