RTOS中任务的创建与删除
我们在stm32f103c8t6单片机上验证RTOS中任务的创建与删除,利用stm32cube进行RTOS的配置。在选择TIM2当做RTOS的时钟,裸机的时钟源默认是 SysTick,但是开启 FreeRTOS 后,FreeRTOS会占用 SysTick (用来生成1ms 定时,用于任务调度),所以需要需要为其他总线提供另外的时钟源。
验证的功能比较简单,选择V1 版本的内核完全够用。
一、验证的思路以及需要使用的函数
1.验证思路
创建 4 个任务:taskLED1,taskLED2,taskKEY1,taskKEY2。
任务要求如下:
taskLED1:间隔 500ms 闪烁 LED1;
taskLED2:间隔 1000ms 闪烁 LED2;
taskKEY1:如果 taskLED1 存在,则按下 KEY1 后删除 taskLED1 ,否则创建 taskLED1 ; taskKEY2:如果 taskLED2 正常运行,则按下 KEY2 后挂起 taskLED2 ,否则恢复 taskLED2。
2.需要用到的函数
xTaskCreate();动态方式创建任务
vTaskDelete();删除任务
osThreadSuspend(TaskLED2Handle);挂起函数, 指定任务进行挂起,挂起后这个任务将不被执行
osThreadResume(TaskLED2Handle);恢复函数, 可以将这个任务从挂起态恢复
xTaskCreate 函数原型

pvTaskCode:指向任务函数的指针,任务必须实现为永不返回(即连续循环);
pcName:任务的名字,主要是用来调试,默认情况下最大长度是16;
pvParameters:指定的任务栈的大小;
pvParameters:传递任务函数的参数;
uxPriority:任务优先级,数值越大,优先级越大;
pxCreatedTask:用于返回已创建任务的句柄可以被引用。

vTaskDelete 函数原型
void vTaskDelete(TaskHandle_t xTaskToDelete);
只需将待删除的任务句柄传入该函数,即可将该任务删除。当传入的参数为NULL,则代表删除任务自身(当前正在运行的任务)。
二、stm32cube的配置
SYS

RCC


GPIO
PA0对应按键1,PA1对应按键2;PB8对应LED1,PB9对应LED2

RTOS
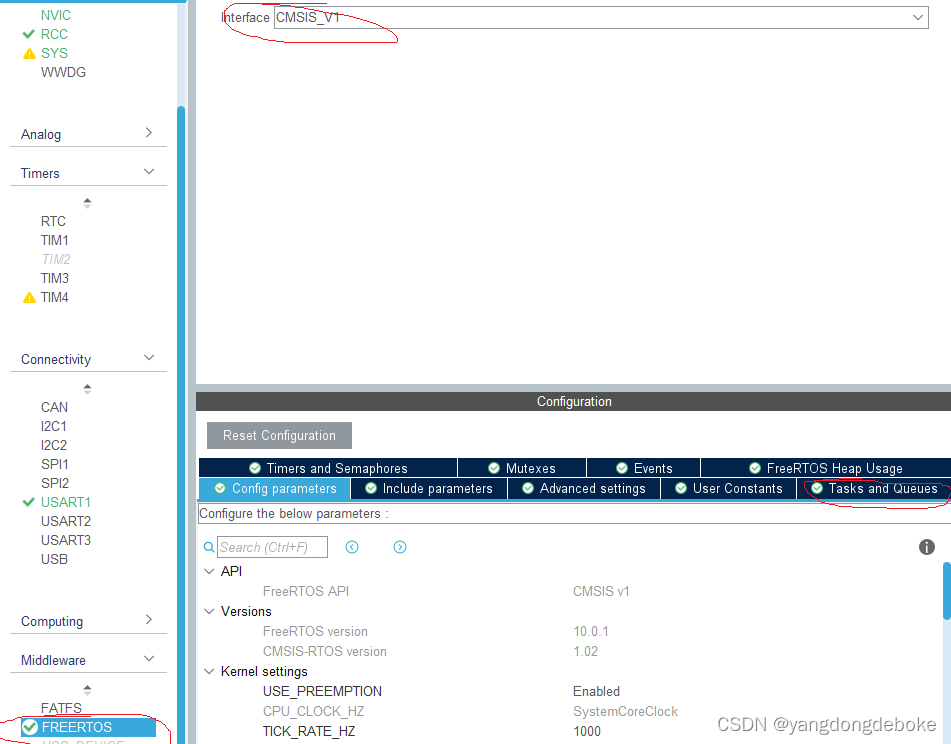
在Tasks and Queues中配置我们的四个任务
其实就是相当于stm32cube帮我们调用了并封装了xTaskCreate()函数。
四个任务的名字分别是
TaskLED1.TaskLED2,TaskKEY1,TaskKEY2;
四个任务的入口函数名字分别是
StartLED1,StartLED2,StartKEY1,StartKEY2;
其余配置相同,如下图
 三、代码部分
三、代码部分
usart.c
加入
#include "stdio.h"
int fputc(int ch, FILE *f)
{?????
?????? unsigned char temp[1]={ch};
?????? HAL_UART_Transmit(&huart1,temp,1,0xffff);?
?????? return ch;
}
同时打开“魔术棒”,勾选Use MicroLIB,点击OK。这样就可以进行串口打印了。
freertos.c
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId TaskLED1Handle;
osThreadId TaskLED2Handle;
osThreadId TaskKEY1Handle;
osThreadId TaskKEY2Handle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartLED1(void const * argument);
void StartLED2(void const * argument);
void StartKEY1(void const * argument);
void StartKEY2(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
? *ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
? *ppxIdleTaskStackBuffer = &xIdleStack[0];
? *pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
? /* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
? * @brief? FreeRTOS initialization
? * @param? None
? * @retval None
? */
void MX_FREERTOS_Init(void) {
? /* USER CODE BEGIN Init */
? /* USER CODE END Init */
? /* USER CODE BEGIN RTOS_MUTEX */
? /* add mutexes, ... */
? /* USER CODE END RTOS_MUTEX */
? /* USER CODE BEGIN RTOS_SEMAPHORES */
? /* add semaphores, ... */
? /* USER CODE END RTOS_SEMAPHORES */
? /* USER CODE BEGIN RTOS_TIMERS */
? /* start timers, add new ones, ... */
? /* USER CODE END RTOS_TIMERS */
? /* USER CODE BEGIN RTOS_QUEUES */
? /* add queues, ... */
? /* USER CODE END RTOS_QUEUES */
? /* Create the thread(s) */
? /* definition and creation of TaskLED1 */
? osThreadDef(TaskLED1, StartLED1, osPriorityNormal, 0, 128);
? TaskLED1Handle = osThreadCreate(osThread(TaskLED1), NULL);
? /* definition and creation of TaskLED2 */
? osThreadDef(TaskLED2, StartLED2, osPriorityNormal, 0, 128);
? TaskLED2Handle = osThreadCreate(osThread(TaskLED2), NULL);
? /* definition and creation of TaskKEY1 */
? osThreadDef(TaskKEY1, StartKEY1, osPriorityNormal, 0, 128);
? TaskKEY1Handle = osThreadCreate(osThread(TaskKEY1), NULL);
? /* definition and creation of TaskKEY2 */
? osThreadDef(TaskKEY2, StartKEY2, osPriorityNormal, 0, 128);
? TaskKEY2Handle = osThreadCreate(osThread(TaskKEY2), NULL);
? /* USER CODE BEGIN RTOS_THREADS */
? /* add threads, ... */
? /* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartLED1 */
/**
? * @brief? Function implementing the TaskLED1 thread.
? * @param? argument: Not used
? * @retval None
? */
/* USER CODE END Header_StartLED1 */
void StartLED1(void const * argument)
{
? /* USER CODE BEGIN StartLED1 */
? /* Infinite loop */
? for(;;)
? {
????????????? HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8);
??? osDelay(1000);
? }
? /* USER CODE END StartLED1 */
}
/* USER CODE BEGIN Header_StartLED2 */
/**
* @brief Function implementing the TaskLED2 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartLED2 */
void StartLED2(void const * argument)
{
? /* USER CODE BEGIN StartLED2 */
? /* Infinite loop */
? for(;;)
? {
??? HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
??? osDelay(500);
? }
? /* USER CODE END StartLED2 */
}
/* USER CODE BEGIN Header_StartKEY1 */
/**
* @brief Function implementing the TaskKEY1 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartKEY1 */
void StartKEY1(void const * argument)
{
? /* USER CODE BEGIN StartKEY1 */
? /* Infinite loop */
? for(;;)
? {
????????????? if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
????????????? {
???????????????????? osDelay(20);
???????????????????? if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
???????????????????? {
???????????????????? printf("KEY1按下\r\n");
??????????????????????????? if(TaskLED1Handle==NULL)
??????????????????????????? {
?????????????????????????????????? printf("任务1不存在,创建任务1\r\n");
?????????????????????????????????? ?osThreadDef(TaskLED1, StartLED1, osPriorityNormal, 0, 128);
?????????? TaskLED1Handle = osThreadCreate(osThread(TaskLED1), NULL);
????????????????????????????????????????? if(TaskLED1Handle!=NULL)
???????????????????????????????????????????????? printf("任务1创建完成\r\n");
??????????????????????????? }
??????????????????????????? else
??????????????????????????? {
?????????????????????????????????? printf("删除任务1\r\n");
?????????????????????????????????? osThreadTerminate(TaskLED1Handle);
?????????????????????????????????? TaskLED1Handle=NULL;
??????????????????????????? }
???????????????????? }
?????? ????????????? while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET);
????????????? }
??? osDelay(10);
? }
? /* USER CODE END StartKEY1 */
}
/* USER CODE BEGIN Header_StartKEY2 */
/**
* @brief Function implementing the TaskKEY2 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartKEY2 */
void StartKEY2(void const * argument)
{
? /* USER CODE BEGIN StartKEY2 */
?????? static int flag=0;
? /* Infinite loop */
? for(;;)
? {
?? if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
????????????? {
???????????????????? osDelay(20);
???????????????????? if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
???????????????????? {
???????????????????? printf("KEY2按下\r\n");
??????????????????????????? if(flag==0)
??????????????????????????? {
?????????????????????????????????? osThreadSuspend(TaskLED2Handle);
?????????????????????????????????? printf("任务2挂起\r\n");
??????????????????????????? ?????? flag=1;
??????????????????????????? }
?????????????????????????????????? else
?????????????????????????????????? {
????????????????????????????????????????? osThreadResume(TaskLED2Handle);
????????????????????????????????????????? printf("任务2已恢复\r\n");
????????????????????????????????????????? flag=0;
?????????????????????????????????? }
???????????????????? }
???????????????????? while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET);
????????????? }
??? osDelay(10);
? }
? /* USER CODE END StartKEY2 */
}
要说明的是
osThreadDef(TaskLED1, StartLED1, osPriorityNormal, 0, 128);
TaskLED1Handle = osThreadCreate(osThread(TaskLED1), NULL);
这两个函数的使用是stm32cube把任务动态创建函数xTaskCreate()封装后的变形,这两个函数的出现就代表TaskLED1的函数创建完成了,这里面的参数分别对应了任务名,入口函数,优先级,参数,堆栈大小,返回已创建任务的句柄,其余的3个任务同理。
接着看
void StartLED1(void const * argument)
{
? /* USER CODE BEGIN StartLED1 */
? /* Infinite loop */
? for(;;)
? {
????????????? HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8);
??? osDelay(1000);
? }
? /* USER CODE END StartLED1 */
}
我们在stm32cube配置任务时,Entry function(入口函数)的名字是StartLED1。
意思就是说,我们的任务要运行的时候,需要我们进入“入口函数”才可以执行相应的命令。这里实现的是LED1每隔1000ms电平变化一次。
再看
void StartKEY1(void const * argument)
{
? /* USER CODE BEGIN StartKEY1 */
? /* Infinite loop */
? for(;;)
? {
????????????? if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
????????????? {
???????????????????? osDelay(20);//软件消除按键抖动
???????????????????? if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
???????????????????? {
???????????????????? printf("KEY1按下\r\n");
??????????????????????????? if(TaskLED1Handle==NULL)
??????????????????????????? {
?????????????????????????????????? printf("任务1不存在,创建任务1\r\n");
?????????????????????????????????? ?osThreadDef(TaskLED1, StartLED1, osPriorityNormal, 0, 128);
?????????? TaskLED1Handle = osThreadCreate(osThread(TaskLED1), NULL);
????????????????????????????????????????? if(TaskLED1Handle!=NULL)
???????????????????????????????????????????????? printf("任务1创建完成\r\n");
??????????????????????????? }
??????????????????????????? else
??????????????????????????? {
?????????????????????????????????? printf("删除任务1\r\n");
?????????????????????????????????? osThreadTerminate(TaskLED1Handle);
?????????????????????????????????? TaskLED1Handle=NULL;
??????????????????????????? }
???????????????????? }
???????????????????? while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET);
????????????? }
??? osDelay(10);
? }
TaskLED1Handle是我们生成TaskLED1任务时的最后一个参数,句柄。如果我们要删除该任务,就用删除任务的函数,它的参数就是该任务的句柄osThreadTerminate(TaskLED1Handle);
任务被删除后就句柄TaskLED1Handle就被赋值NULL;如果没有被删除,句柄TaskLED1Handle的值就不会为NULL。这也是为什么我们按下KEY1就可以不断地通过判断句柄的状态来实现任务的创建于删除,KEY2的操作同理。下面是程序烧录完毕后,连接串口助手按下KEY1,KEY2的情况。

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【SD】IP-Adapter 进阶 骨骼绑定 同款人物【2】
- html+js网页连接MQTT服务器new Paho.MQTT.Client
- BT321F蓝牙音频主机发射连接TWS耳机回连和主动连接的说明
- Java基础面试题3
- day4力扣搜索区间—-二分查找----go实现
- 智能风扇控制系统设计与实现
- 你好!堆排序【JAVA】
- Scrapy+Selenium项目实战--携程旅游信息爬虫
- 银河麒麟服务器操作系统搭建证书服务器并颁发可用于签名的证书步骤说明
- 微信公众号迁移公证函怎么办理?